您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 电气安装工程 > 电气-基于SOPC的无位置传感器直流无刷电动机远程监控系统
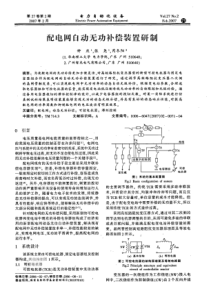
1/16基于SOPC的无位置传感器直流无刷电动机远程监控系统顾春阳,万鹏,陈宇,刘冰电气工程及自动化学院指导教师:杨春玲(教授/博导)一、课题研究目的本课题研究了一种基于SOPC的无位置传感器直流无刷电动机远程监控系统,充分发挥硬件设计的可移植性,具有较高的可靠性和抗干扰能力,在换相精度和通用性方面可达到较优的水平,将能够满足无位置传感器无刷直流电机在高精度领域应用的要求;可以在线升级,缩短开发时间;具有高度的空间开放性,顺应电机驱动系统开放式、智能化的发展潮流。二、研究背景常用的无刷直流电机无位置传感器位置检测方法中,反电动势过零检测法由于检测电路结构简单,算法亦不复杂,因此发展最成熟,应用最为广泛。以软件方式实现过零检测及驱动控制会引入一定的执行延时,还会增加CPU的负担,限制电机其它控制任务的完成。另外,传统的反电势过零检测法仅能在额定转速20%以上以上才能使用,调速范围受到很大制约。随着科学技术的不断发展,生产规模的不断扩大,现代机电控制系统越来越趋向于高精度、微型化及大规模化发展,网络化控制已成为其必然的发展趋势。基于Internet的远程控制技术将使BLDCM控制系统通过网络实现对设备的远程控制、管理和维护,同时也实现资源和技术的共享。它可以拓宽人们的作业空间和范围,;不需要人们铺设专门的通讯线路;有利于减少远程控制的成本、扩大远程化距离、实现对任意节点的访问。三、研究主要内容3.1总体方案设计基于SOPC的无位置传感器直流无刷电动机远程监控系统总体方案如图3.1所示,由FPGA核心处理器、驱动隔离电路、AD检测电路、网络接口、电机本体等部分构成。2/16NIOSII软核三态桥接器Internet接口通用IO数码管控制电机驱动IP核1电机驱动IP核n....数码管AD检测复用电路驱动隔离电路1驱动隔离电路nFLASHSDRAM以太网FPGA按键BLDCMBLDCM图3.1总体方案框图3.2FPGA电机控制IP核设计3.2.1电机控制IP核概述根据无刷直流电机控制方法的分析结果设计电机驱动IP核结构框图如图3.2所示。转速、电流双环负反馈调节器PWM控制器反电势过零检测单元驱动隔离电路BLDCM转向信号启停信号输入转速n*实际转速n转向信号开/闭环控制三段式同步启动模块闭环占空比AhAlBhBlChClBACAD73360接口单元IUbUaUb闭环换相信号实际转速n母线电流IUaUcUc电机驱动IP核AD73360检测电路开环占空比开环换相信号图3.2电机驱动IP核结构设计框图电机驱动IP核主要由AD73360驱动接口、反电势过零检测单元、三段式同步起动模块、转速电流双环负反馈调节器和PWM控制器五大部分组成。3.2.2三段式同步启动模块在无刷直流电机启动时不能根据反电动势进行换流。需要采用包括预定位、加速和自动3/16切换三个环节实现电机的开环软起动,克服反电势过零检测算法不能够自起动的缺陷。图3.3为三段式同步启动模块在Modelsim中的仿真结果。图3.3三段式同步启动Modelsim仿真结果3.2.3AD73360驱动接口单元AD73360是ADI公司生产的新型16位AD转换器,具有六个独立的模拟量输入通道,每个通道可同时采样,使用六线工业标准同步串行接口,所以特别适合于三相制电力运行参数测控类应用(三个相电压和三个相电流同时采样)系统。图3.4为AD73360接口I/O结构图。图3.4AD73360接口I/O图3.2.4反电势过零检测单元反电势过零检测单元由四部分组成。时钟分频模块将50MHz的系统时钟分频得到100kHz的时钟信号送入相位延迟模块。反电势相位转换模块将3路端电压信号计算得到反电势信号。再由反电势信号的过零点得到初步的换相信号。相位延迟模块实现了由phase_i到phase_c信号的转换,同时向速度信号生成模块提供频率与电机转速成比例的脉冲信号flag6。速度信号生成模块利用flag6对电机进行M/T法测速。图3.5为反电势过零检测内部结构(RTL级)。4/16图3.5反电动势过零检测内部结构图(RTL级)3.2.5转速电流双闭环调节器在此模块中,ASR和ACR都采用限幅的增量式数字PI算法。此外,转速调节器同时还融合了改进的分段式的数字PI算法。3.2.6PWM控制器PWM控制器部分包括电机开闭环切换模块和PWM信号生成模块,用于将上述各模块生成的占空比和相位转化成为电机驱动所需的脉冲信号。3.2.7电机驱动IP核综合结构5/16电机驱动IP核内部结构如图3.6所示。图3.6电机驱动IP核内部结构图(RTL级)6/163.3FPGA-DM9000A组件控制器及电机驱动IP核接口设计DM9000A控制器与电机控制器均为用户自定义NIOSⅡ系统的外部设备,均以自定义组件的形式添加到SOPCBuilder中。DM9000A控制器和电机驱动IP核接口添加到SOPCBuilder中后,生成的顶层原理图如图3.7所示。图3.7NIOSⅡ系统顶层原理图3.4硬件电路设计3.4.1FPGA最小系统板本设计使用的主控芯片是CycloneII系列EP2C20Q240C8N。FPGA最小系统板包括六部分:电源部分、EPCS配置电路部分、SRAM与FLASH部分、FPGA芯片及其周边元件、FPGA通用IO部分和UART电路部分。具体原理图见附录1。3.4.2DM9000A网络接口电路DM9000A的功能和控制方法已在3.3节中介绍。其硬件电路主要包括:电源电路、RJ45网络接头和DM9000A芯片及外围配置电路。原理图详见附录2。3.4.3驱动隔离电路7/16驱动隔离电路主要由光耦器件、IR2130芯片与IRF540组成。控制电路输出六路PWM调制波,经过高速双路光耦芯片HCPL2631进行光电隔离后,送入到功率器件中,实现对无刷直流电机的驱动控制。其电路原理图见附录3。3.4.4AD检测电路AD采样电路使用AD73360模/数转换芯片。该芯片自身的优良特性和独到的外围电路设计使其能很好的适用于本系统的信号采集工作。本设计使用交流耦合方式,极大改善了采样电路性能。交流耦合滤掉了无用的直流分量,使反电势的过零点与AD基准电压重合,简化了FPGA对反电势过零点的检测算法;采样信号以基准源为对称中心,最大限度的降低了基准不稳对精度的影响,提高了采样精度。该设计是一次创新性的尝试。AD采样的详细原理图见附录4。3.5嵌入式服务器设计系统的软件设计由本地嵌入式μC/OS-II操作系统下WEB服务器、远程浏览器与控制界面构成一个完整的远程监控控制系统。嵌入式操作系统结构图如图3.8所示。嵌入式uCOS-II操作系统WEB服务器TCP/IP协议栈接口驱动程序HTML网页电机控制接口图3.8嵌入式操作系统结构图3.5.1μC/OS-II操作系统下的嵌入式WEB服务器设计网络通信必须建立在多任务实时操作系统上。因此我们采用μC/OS-II操作系统,其特点为:小巧(最小内核2K);公开源代码,详细的注解;可剥夺实时内核;可移植性强,可裁剪;实时多任务。这些特点有利于网络通信在FPGA中的实现。WEB服务器框图如图3.9所示。8/16HTML文档虚拟文件系统配置模块安全模块应用程序接口HTTP引擎WEB服务器图3.9WEB服务器框图3.5.2WEB服务器工作程序流图本服务器是基于套接字建立连接的,程序流图如图3.10。socket()建立流式套接字,返回套接字号sbind(),将套接字s与本地地址相连listen(),通知TCP,服务器准备好接收连接accept(),接收连接,并得到第二个套接字nsrecv()/send(),在ns上读/写数据,直到数据交换完closesocket(),关闭套接字ns,closesocket(),关闭最初套接字s,服务结束服务器方客户方socket()建立流式套接字,返回套接字号sconnetc(),将套接字s与远程主机相连send()/recv(),在ns上读/写数据,直到数据交换完closesocket(),关闭套接字s,结束TCP对话建立连接服务请求/响应图3.10用套接字建立连接的程序框图3.5.3网络控制界面9/16控制界面是用HTML语言编写的网页,以压缩文件的形式烧写在FPGA的Flash上,客户端通过IE浏览器进行访问。控制网页的截图如图3.11、3.12、3.13所示。(1)主页—进入系统图3.11进入系统-网页截图(2)控制页面图3.12控制页面-网页截图(3)提交成功图3.13提交成功-网页截图10/16四、结论经过近一年的研究,我们设计出了基于SOPC的无位置传感器直流无刷电动机远程监控系统,主要成果有:研究了反电势过零检测原理及其补偿算法,实现了基于FPGA的直流无刷电机控制系统;提出了基于交流耦合方式的反电势信号检测方式,并由实验证明可提高采样精度和抗扰性,提高调速范围;构建了嵌入式服务器,实现远程控制;完成了基于SLBLDCM控制系统实体,实现了双环数字化控制,达到以下指标:可控制电机转速125r/min—2500r/min(5%额定转速—额定转速),调速范围D≥20;低于0.5%的转速误差。系统具有以下创新点:(1)采用SOPC技术,具有自主知识产权,具有良好的通用性与可移植性;(2)可并行无延迟地驱动多路电机;(3)开发一种无等待的过零检测硬件逻辑电路,避免软件检测运行延迟;(4)采用专用三相电量测量AD器件AD73360及交流耦合方式,提高了系统的调速范围和稳定性;(5)构建了基于FPGA的嵌入式服务器,编写了兼容TCP/IP协议的精简版网络应用层协议,为嵌入式远程控制提出了一种新的实现方案。五、体会与收获在此次国家大学生创新性实验计划项目中,我们研究了反电势过零检测原理及其补偿算法,实现了基于FPGA的直流无刷电机控制系统;进行了网络通信的研究,构建了嵌入式服务器,实现了电机的远程控制;达到并超过了立项的各种指标要求。在本系统的设计和制作过程中,我们从理论学习到动手实践,遇到了很多问题,同样积累了很多经验。在整个制作过程,我们的实际动手能力得到了很好的锻炼,进行了FPGA方面的设计应用,学习了网络通信协议,研究了电机控制技术,探究了ProtelDXP软件的使用,PCB板的制作,在实践中进一步加深了对理论知识的理解。在今后的学习中,我们会继续努力,争取更大的进步!11/16附录1FPGA最小系统板原理图SRAM_A[0..17]SRAM_D[0..15]SRAM_WESRAM_CESRAM_OESRAM_UBSRAM_LBFLASH_A[0..21]FLASH_D[0..7]FLASH_WEFLASH_RSTFLASH_CEFLASH_OEU_SRAM_FLASHSRAM_FLASH.SchDocUART_RXDUART_TXDU_UARTUART.SchDocU_configconfig.SchDocU_PowerPower.SchDocSRAM_A[0..17]SRAM_D[0..15]SRAM_WESRAM_CESRAM_OESRAM_UBSRAM_LBFLASH_A[0..21]FLASH_D[0..7]FLASH_WEFLASH_RSTFLASH_CEFLASH_OEGPIO[0..19]UART_TXDUART_RXDLCD_IO[0..13]KEY[0..3]LEDR[0..3]LEDG[0..3]HEX1_D[0..6]U_FPGAIOFPGAIO.SchDocKEY[0..3]GPIO[0..19]LCD_IO[0..13]LEDR[0..3]LEDG[0..3]HEX1_D[0..6]U_PIOPIO.SchDoc图f1.1顶层原理图+1.2V1AINPUT3GND1OUT2OUT4U2ASM11170.1uFC11VCC33100uFC80.1uFC9VCC12+1.2VA1B2C3J1PhonejackD1Diode1N4148S1SW-DPDT+5VVCC5220uFC11KR5DS2LED3VCC5+3.3
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 13888208842
13888208842
本文标题:电气-基于SOPC的无位置传感器直流无刷电动机远程监控系统
链接地址:https://www.777doc.com/doc-128367 .html