您好,欢迎访问三七文档
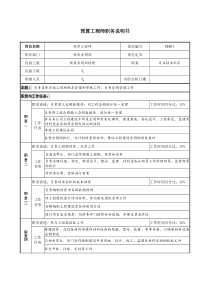
XIII非线性分析13.1简介本章将从实际应用的角度讨论非线性静态有限元分析。但是如何知道我们的问题是非线性呢?最好的方法是考察一个或多个关键荷载作用点的荷载-位移响应。如“分析类型”一章所述,当结构的响应(变形、应力和应变)与荷载(力、压力、力矩、扭矩、温度等)成线性比例关系,这样的分析就是线性分析。当荷载与响应的关系不是线性关系时,这个分析就是非线性分析(如下图所示)。例如,当一个金属受压构件受到相对于材料强度来说较小的荷载作用时,结构的变形将与荷载成线性比例关系,此时结构变形为线性静态变形。但是实际应用中的多数情况下不仅材料是非线性的,结构的几何形状改变也是非线性的。为了降低成本,利用非金属材料(高分子材料、木材、复合材料等)的优点,非金属材料正在许多应用中替代金属材料。在这些应用中,荷载与特征响应的关系是非线性的,即使仅受到轻微的荷载。结构会被优化设计,让荷载接近材料强度,以充分利用材料性能。此时也会开始有非线性行为了。在这些情况下,为了准确地预测结构强度,有必要进行非线性分析。线性与非线性响应对比如之前的章节所述,在静力分析中假定与荷载和响应有关的刚度矩阵是常量。但是,现实世界中所有的结构行为都是非线性的。刚度矩阵中包含了几何参数如长度、截面积、惯性矩等,还包含材料属性如弹性模量、硬化准则等。静力分析假设这些参数在结构荷载作用下不发生改变。另一方面,非线性静力分析考虑了在加载过程中这些参数的变化。这些变化体现在刚度矩阵的更新上,每个荷载增量作用以后,刚度矩阵都会根据变形以后的结构(即变化后的属性)重新创建。需要指出的是,虽然现实世界是非线性的,但在许多情况下线性假设是可行的,也就是说可以用线性分析来替代。从计算资源的角度来说,线性分析消耗的计算资源更少。13.2线性和非线性FEA对比下表简要列出了线性和非线性有限元分析之间的主要不同。关于荷载-位移关系、应力-应变关系、应力-应变度量等主要不同将在本章详细介绍。序号特征线性问题非线性问题1.荷载-位移关系位移与荷载成线性关系,刚度是常数。位移引起的几何变形认为是小变形并且可忽略。初始状态或未变形的状态作为参考状态。非线性问题的刚度是随荷载变化的函数。位移可以很大并且几何变形不可忽略。因此刚度是荷载的函数。2.应力-应变关系在比例极限/弹性极限之前是线性的。杨氏模量等属性可以很容易得到。是关于应力-应变或时间的非线性函数,获取这个关系比较困难,需要大量的材料实验。注意真实应力和工程应力之前的差别。3.比例缩放可以。如果1N的力引起了x个单位位移,那么10N的力将产生10x的位移。不可以。4.线性叠加可以。可以进行工况的线性组合。不可以。5.可逆性在卸掉外荷载后结构的行为是完全可逆的。这也意味着荷载的顺序并不重要并且最终状态不会受有加载历史的影响。卸载后的状态与初始状态不同。因此不能进行工况叠加。加载历史非常重要。6.求解序列荷载一次性加载,没有迭代步。荷载被分解到多个小的增量步进行迭代加载以保证每个荷载增量步都满足平衡条件。7.计算时间短长8.用户与软件的交互要求很少需要经常查看软件状态,因为可能无法收敛。13.3非线性的类型有三种基本的非线性类型:几何非线性、材料非线性和接触非线性。回顾线弹性的概念——小变形并且应力与应变成比例。线弹性1)几何非线性几何非线性可能与以下几种情况有关:1)大应变2)大转角3)大变形几何非线性会考虑大变形可能引起的几何截面变形(在线性静力分析中截面假定为常量)。大位移也可能由几何屈曲引起。屈曲是构件在受到较大的压应力情况下的突然失效现象。实际上失稳时的压应力小于材料的根限压应力。因此平衡方程必须参考变形后的结构几何重写。此外,在荷载增加的过程中,方向可能会发生变化,比如压力作用下膜结构膨胀。(参考Conceptsandapplicationsoffiniteelementanalysis;R.D.Cooket.al,595页)大位移和大转角(小应变;线性或非线性材料)大位移、大转角和大应变(线性或非线性材料)K.J.Bathe,FiniteElementeMethoden在线性FEA中,应变,如x方向应变可写为εx=∂u/∂x,也就是说在表达式εx=∂u/∂x+...[(∂u/∂x)z+(∂v/∂x)z+(∂w/∂x)z]中只考虑了一次项的影响。在大位移(非线性)中,表达式的二次项也要考虑。另外,材料的应力-应变关系也不一定是线性的。2)材料非线性材料非线性的特点非线性材料(小位移)K.J.Bathe,FiniteElementeMethoden所有的工程材料本质上都是非线性的,因为无法找到单一的本构关系满足不同的条件比如加载、温度和应变率。可以对材料特性进行简化,只考虑对分析来说重要的相关因素。线弹性材料(胡克定律)假设是最简单的一种。如果变形可恢复,则材料为线弹性,如果变形不可恢复,则为塑性。如果温度效应对材料属性影响较大,则应该通过热-弹性或热-塑性关系考虑结构和热之间的耦合效应。如果应变率对材料有明显影响,则应使用粘-弹性或粘-塑性理论。上图是一个材料非线性的示例。材料非线性的简单分类:1.非线性弹性2.超弹性3.理想弹-塑性4.弹性-时间无关塑性5.时间相关塑性(蠕变)6.应变率相关弹-塑性7.温度相关的弹性和塑性如果考察上图中的应力-应变曲线,则材料非线性可以分为以下几类:1.线弹性-理想塑性2.线弹性-塑性。应力-应变曲线的塑性段与时间无关,还可细分为两种:a.弹性-分段线性塑性(如下图所示)b.弹性-真实应力应变曲线(a)弹性材料(b)弹塑性材料线性和非线性材料的应力-应变曲线3.没有固定屈服点的非线性弹性材料,比如进入塑性但应变远低于20%4.超弹性材料,比如大位移下的橡胶。典型应用是垫片材料。3)边界条件非线性/接触非线性当位移D的阶数发生变化时,说明边界条件发生改变,比如自由度的改变。接触K.J.Bathe,FiniteElementeMethoden在分析中有限元模型的边界条件改变时就产生了边界条件非线性。在分析过程中边界条件可以增加或删除。这种非线性通常涉及接触,接触点随荷载的变化可能接触或分离。接触对中的荷载传递机制是一个复杂的现象。研究人员已经开发了几种理论使用接触集来描述荷载传递。有限元代码中典型的接触算法的工作原理如下:首先,通过测量接触面上节点之间的距离来检查接触面分开或闭合。如果接触是闭合的,则将反力作用在接触的节点上,以防止他们互相穿透。如果接触是分开的,则这些节点之间没有荷载传递。施加到节点上的反作用力基于接触表面材料的刚度来计算。由于通过接触集的荷载传递不是恒定的,而且它需要不断检查接触的状态,这种分析不能用线性静态分析的代码实现。提高检查接触状态的频率,可以得到更准确的结果。接触处理接触处理的方法有两种:•罚函数法•拉格朗日乘数法罚函数法是最常用的显式代码,在大多数RADIOSS接口中都有应用。拉格朗日乘数法在某些特殊情况下使用。罚函数法的接触面主要基于主/从面方法。接触只能发生在一组从节点和一组主面之间。主面的定义与主面所在的单元类型有关。如果是三节点或四节点壳单元,主面就是单元表面。如果是实体单元,主面就是实体单元的一个外表面。如果是二维实体单元,主面可以是一条边。与罚函数法相反,拉格朗日乘数法是纯粹的数学方法不需要物理单元(弹簧)来模拟接触。通过求解非线性系统方程来计算接触条件。因此不会由于过高的接触刚度而造成接触迭代步失败,但是由于在每个迭代步中要求解新的非线性方程组,将会消耗更多的CPU时间。这个方法的优点是可以完全阻止从节点穿透接触面(也就是说完全精确地满足接触条件),但是不能计算摩擦。13.4非线性分析中的应力-应变关系度量线性静态和非线性有限元分析有一个重大区别。在线性分析中,我们经常使用工程应力-应变的定义,而在非线性分析通常是真实应力-应变。关于应力/应变关系,下面的网页有很好的总结:。通过一个简单的一维的例子中,我们将研究这些不同的应力应变的定义。轴向变形的一维杆1)工程应变和工程应力工程应变是小应变度量方法,使用初始的几何数据计算。工程应变的计算是线性的,因为它取决于已知的初始几何(例如长度)。工程应变仅限于小转角,因为刚体的转动会引起非零的应变。工程应力(σ)是与工程应变(ε)相结合的应力测量方法。它使用当前的截面力F和初始的截面积A0来计算。2)对数应变和真实应力对数应变/自然应变/真实应变是度量大应变的方法,计算公式如下:它是非线性应变的度量,因此是关于最终长度的非线性函数。与线性应变相比,对数应变(或真实应变)是可加的。考虑一个初始长度为1m的杆经过下面3步的变形:第1步:从1m变形至1.2m第2步:从1.2m变形至1.5m第3步:从1.5m变形至2m在下表中我们比较了工程应变和真实应变。可以清楚地看到,只有真实应变是可加的,因此在非线性分析中应该使用真实应变。步骤工程应变真实应变10.2Log(1.2/1)=0.182320.3/1.2=0.25Log(1.5/1.2)=0.223130.5/1.5=0.33Log(2/1.5)=0.2876所有步骤相加0.780.69311到3步总应变(2.0–1.0)/1.0=1.0Log(2/1)=0.6931结论工程应变是不可加的,不能准确表现变形历史真实应变是可加的,准确表现了变形历史真实应力的计算与根据对数应变计算1-D应变类似,用F除以当前(变形后)的面积。这种应力通常也称为柯西应力。3)Green-Lagrange应变和第二类Piola-Kirchoff应力Green-Lagrange应变是另一种大应变度量方法,一维情况由下式计算:由于它由更新后的长度L(未知的)的平方来决定,因此它是非线性的。这种方法相比对数应变或Hencky应变在计算上的优势是它自适应任意大应变问题中的大转角。Green-Lagrange应变对应的应力是第二类Piola-Kirchoff应力,对于一维问题计算公式如下:可以看出这个应变没有太多的物理意义。13.5非线性有限元分析的基本步骤1.在应用一些没有用过的非线性功能之前,先通过一个简单的模型了解软件是如何工作的。预测结构的表现,可以查看研究报告和示例。2.理解软件支持文档,以及输出和警告信息。3.明白你需要什么结果。准备一个需要问答的问题清单。为了回答这些问题,来创建分析,包括模型,材料模型和边界条件。4.最终模型要尽可能简单。首先做一个线性分析,可以提供大量的信息,比如哪里的应力高,哪些地方可能发生的初始接触,多大的荷载将导致模型进入塑性。线性分析的结果甚至可能指出没有必要进行非线性分析。例如:未达到屈服极限,没有接触并且位移很小。5.验证和确认的非线性有限元分析(FEA)的结果。确认是指从数值上看“模型是正确计算的”。不考虑网格尺寸和时间步长的离散化是常见的错误。验证是指“模型是否正确”,比如几何、材料、边界条件、接触等是否和真实情况一致。6.查看结构的相关假设,打开或关闭大应变后的几何变形,如果简单的材料模型不能给出预期的结果可以尝试不同的材料模型(某些情况下材料模型只适用于常用单元,你可能需要改变单元类型)。13.6非线性静力分析的一般流程一个典型的非线性静力分析项目需要以下步骤:网格划分:有限元模型的创建是有限元分析一个非常重要的步骤,不论进行什么样的分析。在第4-7章已经讨论过对于某些应用的如何选择适当的单元类型。FEA小组会得到零件的几何数据,需要对这些几何进行网格划分以得到零件网格。当装配中所有的零件划分网格后,使用适当的连接单元把它们都连接在一起如CWELD或CBUSH。一般来说,四边形单元和六面体单元优于三角形单元、楔形单元和四面体单元。应该注意模型中的关键特征,比如圆角、孔和倒角。如果在两个平行表面之间有紧固件或焊接,应该尽量在两个面上创建相似的网格。这将有助于焊接单元或刚性单元垂直于表面而不破坏壳单元。然而,许多有限元分析(FEA)代码支
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 keko23
keko23
本文标题:有限元非线性分析
链接地址:https://www.777doc.com/doc-1367905 .html