您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 交通运输 > 元胞自动机交通流模型
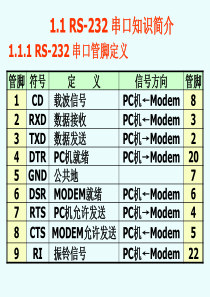
第六章元胞自动机交通流模型本章主要内容§1元胞自动机理论§2元胞自动机交通流模型详见:贾斌,高自友,基于元胞自动机的交通系统建模与模拟,科学出版社,2007-10相关文献:NagelandSchreckenberg.ACellularautomatonmodelforfreewaytraffie.JournalofPhysics(France),1992郑英力等.交通流元胞自动机模型综述.公路交通科技.2006,23(1):110~115孙跃等.基于元胞自动机原理的微观交通仿真模型.重庆大学学报(自然科学版).2005熊桂林,黄悦.元胞自动机在混合交通仿真中的应用.系统工程.2006狄宣.基于元胞自动机的快速路仿真建模与交通流优化分析.同济大学硕士学位论文.2008.3SMaerivoet,BDeMoor,Cellularautomatamodelsofroadtraffic.PhysicsReports419(2005)1–64教学目的:了解初等元胞自动机的基本概念,掌握元胞自动机交通流模型的建立方法,掌握NS交通流模型的特点、适用条件及其仿真。重点:NS交通流模型难点:NS交通流模型的仿真§1元胞自动机理论一、什么是元胞自动机元胞自动机(CellularAutomata,CA)是一种时空离散的局部动力学模型,是研究复杂系统的一种典型方法,特别适合用于空间复杂系统的时空动态模拟研究。元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说是一个方法框架。在CA模型中,散布在规则格网(LatticeGrid)中的每一元胞(Cell)取有限的离散状态,遵循同样的作用规则,依据确定的局部规则作同步更新。大量元胞通过简单的相互作用而构成动态系统的演化。CA模型的特点:时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间和空间上都是局部的。二、初等元胞自动机初等元胞自动机是状态集S只有两个元素{s1,s2},即状态个数k=2,邻居半径r=1的一维元胞自动机。由于在S中具体采用什么符号并不重要,它可取{0,1},{-1,1},{静止,运动}等等,重要的是S所含的符号个数,通常我们将其记为{0,1}。此时,邻居集N的个数2·r=2,局部映射f:S3→S可记为:111(,,)ttttiiiiSfSSS二、初等元胞自动机初等元胞自动机是状态集S只有两个元素{s1,s2},即状态个数k=2,邻居半径r=1的一维元胞自动机。由于在S中具体采用什么符号并不重要,它可取{0,1},{-1,1},{静止,运动}等等,重要的是S所含的符号个数,通常我们将其记为{0,1}。此时,邻居集N的个数2·r=2,局部映射f:S3→S可记为:111(,,)ttttiiiiSfSSS由于只有0、1两种状态,所以函数f共有28=256种状态。t111110101100001010001000t+101001100S.Wolfram的初等元胞自动机256种初等CA规则对给定初值及规则f,可通过计算机得到N步以后的演化结果t111110101100011010001000t+10000…1…110000…0…110000…1…110000…1…110000…1…110001…0…110110…0…111010…0…01rule1rule2rule3rule4…rule184…rule255rule256Threecenturiesagosciencewastransformedbythedramaticnewideathatrulesbasedonmathematicalequationscouldbeusedtodescribethenaturalworld.Mypurposeinthisbookistoinitiateanothersuchtransformation,andtointroduceanewkindofsciencethatisbasedonthemuchmoregeneraltypesofrulesthatcanbeembodiedinsimplecomputerprograms.详见:《ANewKindofScience》Freeonlineaccess:三个世纪以前,人们发现建立在数学方程基础上的规律能够用于对自然界的描述,伴随着这种新观念,科学发生了变革。在此书中我的目的是应用简单的计算机程序来表达更为一般的规律,并在此种规律的基础上建立一种新的科学,从而启动另一场科学变革。详见:《ANewKindofScience》Freeonlineaccess:号规则:分形结构——CA_rule_90.m110号规则:复杂结构——CA_rule_110.m§2元胞自动机交通流模型一、第184号规则特别注意:第184号规则01020304050607080901000102030405060708090100特别注意:第184号规则车辆行驶规则为:黑色元胞表示被一辆车占据,白色表示无车,若前方格子有车,则停止。若前方为空,则前进一格。t111110101100011010001000t+1101110001992年,德国学者Nagel和Schreckenberg在第184号规则的基础上提出了一维交通流CA模型,即,NS模型(或NaSch模型)二、NS模型在第184号规则的基础上,1992年,德国学者Nagel和Schreckenberg提出了一维交通流CA模型,即,NS模型(或NaSch模型)NagelandSchreckenberg.ACellularautomatonmodelforfreewaytraffie.JournalofPhysics(France),1992CA模型最基本的组成包括四个部分:元胞(cell)、元胞空间(lattice)、邻域(neighbor)及更新规则(rule)。NS模型是一个随机CA交通流模型,每辆车的状态都由它的速度和位置所表示,其状态按照以下演化规则并行更新:a)加速过程:b)安全刹车过程:c)随机慢化过程:(以随机慢化概率p)d)位置更新:nnnxxvmax(1,0)nnvvmin(,1)nnnvvdmaxmin(1,)nnvvv其中:L---车辆长度~7.5m1nnndxxLNS模型的演化规则:1)加速:司机总是期望以最大的速度行驶2)安全刹车:为避免与前车碰撞3)随机慢化(以随机慢化概率p):由于不确定因素a)过度刹车b)道路条件变化c)心理因素d)延迟加速4)位置更新:车辆前进a)加速过程b)安全刹车过程c)随机慢化过程(以随机慢化概率p)d)位置更新max2v例:设在NS模型的基础上,又陆续地提出了一系列一维CA交通模型,如TT、BJH、VDR、FI等模型;双车道CA交通模型:STNS模型机非混合CA模型:CCA模型城市路网CA二维模型:BML、CTM模型LosAlamosNationalLaboratory:TRANSIMS(TRansportationANalysisSIMulationSystem)近年国际上出现的一门新的交叉学科-交通物理学B.S.Kerner,Springer2004“幽灵式交通堵塞”(“phantom”or“ghost”trafficjams)的现象早在1975年就由Treiterer和Myers通过航拍图像发现。直到1992年由德国学者Nagel和Schreckenberg用元胞自动机(CA)交通流模型才加以成功再现和模拟解释。NagelandSchreckenberg.ACellularautomatonmodelforfreewaytraffie.JournalofPhysics(France),1992高速公路自发形成的堵塞——幽灵堵塞(ghostjam)、时走时停(stop-and-gowave)航拍图,J.Treiterer,1975年条件:随机慢化概率p;密度ρ=13.3veh/km/lan(0.1)ρ=20veh/km/lan(0.15)ρ=33veh/km/lan(0.25)车辆长度~7.5m;道路长度L=7.5m×120=900m速度:1~7.5m/s=27km/h;2~2×7.5m/s=54km/h;3~3×7.5m/s=81km/h;4~4×7.5m/s=108km/h;5~5×7.5m/s=135km/h;随机慢化概率p=0.2;密度ρ=13.3veh/km/lan(0.1);第5秒第10秒第20秒第40秒×7.5m随机慢化概率p=0.2;密度ρ=20veh/km/lan(0.15);初始随机×7.5m随机慢化概率p=0.2;密度ρ=27veh/km/lan(0.2);初始均匀分布×7.5m随机慢化概率p=0.2;密度ρ=33veh/km/lan(0.25);×7.5m交通流CA模型的主要优点:(1)模型简单,特别易于在计算机上实现。(2)能够再现各种复杂的交通现象,反映交通流特性。在模拟过程中人们通过考察元胞状态的变化,不仅可以得到每一辆车在任意时刻的速度、位移以及车头时距等参数描述交通流的微观特性,还可以得到平均速度、密度、流量等参数,呈现交通流的宏观特性。(3)能够再现单车道、多车道以及路网的交通流建模;机动车和非机动车交通流的建模三、多车道CA模型与单车道模型相比,多车道模型增加了换车道规则。Nagel等在单车道NS模型的基础上,又提出了多车道模型。在该模型中,在各条车道上行驶的车辆要遵守NS规则,在进行车道变换时还要满足车道变换规则(lane-changingrules)。该模型的车道变换规则如下:(1)如果vmaxgap,且gapleft≥gap,则从右车道变换至左车道。(2)如果vmaxgap-voffset,且vmaxgapright-voffset,则从左车道变换至右车道。(3)如果vbackgapback(保证后车不会与本车发生碰撞),则在满足以上条件的情况下,车辆以概率Pchange,进行车道变换,并规定以下限制条件:如果vrightgapleft,则vright=gapleft(禁止右车道的车辆超过左车道车辆)。四、网络CA模型1992年,Biham,Middleton和Levine等利用元胞自动机设计了一种简单的二维元胞自动机模型(BML模型)来模拟城市网络的交通流现象,研究交通阻塞问题。模拟结果表明当车辆密度大于某一临界值时,将会发生阻塞。BML模型简单直观:有一个NxN的方形点阵,N是点阵的边长,每个格点可以有一辆由南向北行驶的车辆,或者有一辆由东向西行驶的车辆,或者没有车辆占据。在每一奇数时间步,南北向的车辆可以向前行驶一个格点;在每一偶数时间步,东西向的车辆可以前进一个格点;如果车辆前方的格点已有其他车辆占据,那么这辆车只能在原地等候,不能向前行驶。这样,每个格点都相当于信号控制交叉口。BML模型的改进Chowdhury和Schadschneider将BML模型与NS模型相结合,提出了城市交通网络模型(CS模型)。该模型在每两个连接的交叉口中设置若干个元胞表示路段,这些路段用NS模型建模;每个交叉口为信号控制交叉口,信号周期为T。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

![2王安耕-我国电子政务发展之需求与技术双轮驱动new[1]](/doc-24907.png)


 manchenqiang
manchenqiang
本文标题:元胞自动机交通流模型
链接地址:https://www.777doc.com/doc-1463011 .html