您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 项目/工程管理 > OracleERP系统表结构详细设计
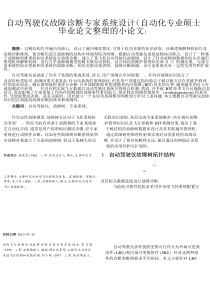
自动驾驶仪故障诊断专家系统设计(自动化专业硕士毕业论文整理的小论文)摘要:以树结构先序遍历为核心,设计了遍历推理算法,可用于较为直观的知识获取、诊断逻辑解释机制以及故障诊断推理,使诊断信息在故障树的结构中体现得较为明晰。根据自动驾驶仪系统故障知识特点,设计了一种基于故障树的推理机制对系统进行故障诊断。建立了某飞机自动驾驶仪故障树,设计了针对故障树数据库的先序遍历推理机和解释机制,进行合乎故障树模型的树关联知识获取,结合相应的维护修理知识和BIT检测结果,完成专家系统的知识更新和对系统的故障诊断。初步实验结果表明,故障诊断准确,该专家系统具有一定的实用性和扩展性。自动驾驶仪是涵盖了许多子系统的集成系统,涉互,用户须确认中间现象1。有些对故障知识进行了及部件种类较多,故障因果关系复杂,针对该系统的原理细化,但是用户须通过指向特定子树以断方法在其维护修理时的需求较高。确认推理流程来进行诊断。许多故障数据库的建随着机内检测(BIT)技术的完善,越来越多的自立在地面测试中获得2,并没有和实际飞行数据以及动驾驶仪系统可得到自检测。然而,许多被BIT技术飞行员操纵信息结合,因此影响了专家系统工作内存检测到的故障事件看似孤立,但在特定的模型框架中(workingmemory)的真实性,导致虚警或误报。是有关联的。因此建立一个良好的故障模型和推理方针对上述问题,本文根据自动驾驶仪故障知识的法将提高故障诊断的效率和准确性。关键词:自动驾驶仪;故障树;专家系统;作为定性故障模型,故障树方法对于飞控系统较关联知识获取,从而完成专家系统维护;结合相应的维为有效3。然而当前有些基于故障树的专家系统缺护修理知识以及飞行参数和BIT检测结果,提出了基乏自动化手段,通常是用户按照相应测试步骤,经专家于树结构的故障树数据库设计及其有限遍历推理机;系统进行试探性诊断。比如有些故障树诊断系统虽然通过故障树的推理机制来实现对该类系统的故障诊对故障对象建立了完备的故障树,但过于依赖人机交断,并设计了相应的解释方法;最后通过实例验证该系统的实用性和可扩展性。作者简介:张竞凯(1981),男,河北泊头人,博士,主要研究方1自动驾驶仪故障树拓扑结构工学博士,主要研究方向为飞行控制与仿真、容错控制、智能计算等;朱江乐(1982),男,安徽蚌埠人,博士,主要研究方向为及其相关数据连线进行故障诊断。飞行容错控制。当前高可靠性民机常采用多余度飞控系统配置方[3][4]收稿日期:2010-03-28向为飞行控制系统故障诊断及其专家系统技术;章卫国自动驾驶仪部件按照更换可行性分为外场可更换(1956),男,安徽南陵人,教授,博士生导师,主要研究方向为组件(LRU)和内场可更换组件(SRU),针对这两种组先进飞行控制和智能控制;刘小雄(1973),男,陕西周至人,件的诊断和维修要求不尽相同。本文主要针对LRU式,其中又以四余度比较监控和三余度自监控方式最为常用4。随着自监控技术的日益提高,三余度配置方式在提高监控效率、降低多余度配置成本和增强系统的故障容忍能力方面都有着较好的应用前景5。因此,本专家系统针对三余度配置的自动飞行系统进行诊断。对可靠性要求较高的民机余度通道运行状态主要为热并行运行方式,故不用考虑冷备件逻辑形式6。此外,自动驾驶仪设备异常有时并非仅由故障引起,人工配平或复飞等操作也会导致驾驶仪自动断开,这些因素也应作为设备异常原因在建立故障树时考虑进去,以免系统误报。根据上述对余度配置和故障信息逻辑结构的分析,可以设计如图1所示的故障树。图1中顶级故障征兆是以飞控系统的自动驾驶仪为核心,它所表征的是∃自动驾驶仪自动断开%;逻辑符号∃%表示∃与%逻辑,∃%表示∃或%逻辑;方块节点∃%描述的顶事件和中间事件表示∃系统级故障征兆%和∃中间故障征兆%;圆形节点∃&%的基本事件表示∃故障原因%。AHC和FCC分别表示姿态航向计算机和飞控计算机。2故障诊断专家系统图1自动驾驶仪自动断开故障树散信息。该类信息是诊断需要的主要数据源。信息字各段定义如表1所示。表1ARINC429信息字各段定义基于故障树推理的自动驾驶仪故障诊断专家系统的总体结构如图2所示。系统工作主要分为飞行数据接收和处理、故障知识获取以及故障诊断3个过程。2.1数据存储、接收和预处理32奇偶校验位31~30符号状态矩阵29~11数据区10~9源/目的识别位8~1标志位飞行参数和BIT信息存储的主要形式是ARINC429信息字7。该类型信息有32位,一般有5种应用格式:BNR、BCD、离散、维护和AI。其中离散数据(即DISC数据)表示离散量,主要表征设备状态、操作等离该类信息字的最直接表示形式是二进制,此外还可以通过十六进制和十进制间接表示。标志位(前8位)一般表示该信息字名称、总线类型等信息,机载数据发送端发送的数据先将其摘除。而从第9~32位的信息在ICD文档中均有定义,这些位主要表示部件的[5][6][5]工作状态、操作模式等信息。比如用一个十进制数1024(2)表示某个信息字的值,说明从第9位开始,行故障诊断的推理是反向链推理8,即已知征兆,在向左数的第10个数(相当于第[10]18位)被置∃1%,根据假设征兆发生为真的基础上,获得支持该征兆发生的其他事件的过程。技术实现如下所述。ICD9信息查找第18位定义,即可判断出其所表示的当检测到某时刻出现系统故障征兆(比如自动驾具体信息。数据接收和预处理主要读取飞行数据服务器发送来的信息,并将信息中所需的数据写入以参数名命名的参数文件(图2中的工作内存)中。驶仪自动断开或无法正常接通)时,诊断程序开始进行故障树推理诊断,以顶事件为起点进行基于先序遍历的查找(如图3所示)。在查找每个节点时,根据该节点的∃Parameter%属性值(如表2所示),打开相应参数数据文件,将数据文件中的该时刻值和该节点的∃ParaValue%属性值进行∃&%运算,若运算结果仍为∃ParaValue%属性值,于是匹配成功,这说明该故障树节点为系统故障征兆的一个故障原因。如此,遍历完所有节点后,结束诊断。图2故障诊断专家系统结构图2.2知识的表示和获取知识主要指基于故障树形式的诊断规则和逻辑。知识获取技术的基础是建立有效的知识表示和存储方式,根据图1的故障树,结合信息字的相应值,可以设计数据表,通过各字段定义,描述故障树节点信息,并以此为核心设计关系数据库,便于在故障诊断专家系统中操作。数据表定义如表2所示。表2表21故障树节点事件数据表字段名数据类型说明ID数字用于识别故障树各节点的数字代码图3遍历函数主要流程eventame文本节点故障信息根据图3的遍历流程结合图1的故障树,得到故Parentnumber_childrenLogicalgateParameterParaValue数字数字文本文本数字节点上一级ID节点的子事件个数子事件节点的逻辑关系确定该事件发生的32位参数信息字名表征故障事件发生的32位参数信息字值障事件的检索序列如图4所示(事件已编号)。2.4解释机制专家系统应用的领域专家知识包含许多经验性信息,因此通过解释机制阐明诊断逻辑和策略可以提高专家系统透明度。较为常用的解释方法有预置文本法、执行跟踪法、策略解释法和自动程序员法等。本系由于本系统以LabWindows/CVI为开发环境,因统采用执行跟踪法。此采用树控件表示故障树结构,树项控件则表示故障树节点事件信息,控件ID和故障树事件ID绑定。所有操作借助表格控件、树控件和数据库接口函数完成,这些工具在LabWindows/CVI中均有封装,不再赘述。2.3推理机制根据该法,解释机制分为两个部分:故障树遍历显示和诊断结论。前者在故障诊断流程执行中即已经得到匹配事件ID序列,再通过遍历显示故障树并框选故障树相应树项控件进行可视化解释;后者则利用已得到的匹配序列以及符合故障树的逻辑语言组成诊断结10[9][8]图4故障树诸事件检索序列3故障诊断测试及主要人机接口现通过实验对本系统进行测试。首先读取工作内存中参数数据文件。各参数的采样频率一样,且其应用类型均为DISC数据。通过ICD定制,32位DISC型的信息字的数据区(如表1所示)各位可以定义为操作模式选择、LRU故障告警、各系统工作状态等信息,以1表示某事件发生,以0表示未发生。将信息字按参数分类,依据数据区各位定义解析,绘制数据图形,观察其相对于时间的变化情况。图5为某型飞机某段飞行期间相关参数被解析并分类之后的示意图。分别用实线、虚线和方块表示余度通道1、2、3的各部件状态变化。该图只揭示了各参数的改变情况,无法得到自动驾驶仪自动断开原因。现通过本文设计的专家系统进行推理,并将诊断结论和图5参数改变信息作比较。自动驾驶仪自动断开2次(两次由0跳变为1)。第1次在第10s,因采取复飞模式,为防止自动驾驶设备和人工操作发生冲突,故自动驾驶仪自动断开。复飞操作持续至第295s后,自动驾驶仪重新连接。第2次自动断开在第754s。此前第600s时,余图5相关参数的解析和分类度通道1的FCC故障,根据故障树逻辑(图1),通道1弃用。第673s,余度通道2的伺服系统故障,通道2弃用。第754s,余度通道3的AHC故障,通道3弃用。此时3个余度通道均故障,自动驾驶仪自动断开。故障诊断和解释界面如图6所示。首先∃自动驾驶仪自动断开%作为∃列举信息%检测到的故障征兆,发生时间分别为16∋13∋25和16∋25∋49。由于前者是由于复飞操作导致,其诊断毋庸赘述。后者对应的是部件故障导致的断开,其对应树项控件被自动框选。匹配事件ID序列包含对应图1中的∃1号FCC系统故障%、∃2号伺服系统故障%和∃3号AHC故障%,于是自动框选其对应的树项控件,并生成结论文本。当各故障事件的逻辑关系变化后,可通过知识获取模块进行修改。知识获取模块界面如图7所示,专家在选择故障树后,先对故障树遍历显示,再通过刷新故障树表中的数据对所选树进行访问,借助一系列操作(删除、插入和修改)使故障知识得到更新。图6图61诊断和解释图62逻辑关联并诊断,若故障相互影响的延迟时间较长(如操纵面和操纵机构),必须考虑基于飞行参数辨识的方法进行诊断。4结束语图7知识获取界面以上设计了故障树诊断模型,结合相应参数制定了故障树数据表(表1),该表中明确了故障事件逻辑关系和诊断依据,建立了故障诊断推理机和工程信息来源的良好接口。以树结构先序遍历为核心,设计了遍历推理算法,可用于较为直观的知识获取、诊断逻辑解释机制以及故障诊断推理,使诊断信息在故障树的结构中体现得较为明晰。但系统在自动学习方面较为欠缺,而且主要针对较小时间范围内的故障信息(如电子飞控器件)进行参考文献:1夏勇.基于故障树的运载火箭故障诊断专家系统[D].重庆:重庆大学,2007.2宋云雪,史永胜,钱礼斌.飞机起落架故障数据库模型与实现方法研究[J].飞机设计,2002(1):14-17.3NandaM,RaoS.Aformalmethodapproachtoanalyzethedesignofaircraftflightcontrolsystems[A].Proceedingsof3AnnualIEEESystemsConference[C].Vancouver,BC,2009:64-69.4宋翔贵,张新国.电传飞行控制系统[M].北京:国防工业出版社,2003:125-131.5王纪森,余洋,梁海毅.一种自监控二余度舵回路设计方法[J].机床与液压,2007,35(4).6姜涛,谢晓方,宇伟.ARINC429总线在航空设备中的应用[J].航空计算技术,1997(3).7王建新,杨世凤,隋美丽.LabWindows/CVI测试技术及工程应用[M].北京:化学工业出版社,2006:386-434.8GiarratanoJC,RileyGD.专家系统:原理与编程[M].北京:机械工业出版社,2005:16-20.9顾世哲.ARINC429数据测试分析仪的研究与实现[D].西安:西北工业大学,2006:16-18.rd
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 mokey520
mokey520
本文标题:OracleERP系统表结构详细设计
链接地址:https://www.777doc.com/doc-14709 .html