您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 电力拖动自动控制系统实验报告
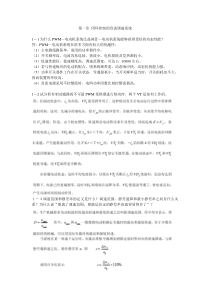
1电力拖动自动控制系统实验报告实验一双闭环可逆直流脉宽调速系统一,实验目的:1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。3.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数整定。二,实验内容:1.PWM控制器SG3525的性能测试。2.控制单元调试。3.测定开环和闭环机械特性n=f(Id)。4.闭环控制特性n=f(Ug)的测定。三.实验系统的组成和工作原理TAU-UiASRACRUPWDLDGDPWMFAGM*0U+*0U+M2图6—10双闭环脉宽调速系统的原理图在中小容量的直流传动系统中,采用自关断器件的脉宽调速系统比相控系统具有更多的优越性,因而日益得到广泛应用。双闭环脉宽调速系统的原理框图如图6—10所示。图中可逆PWM变换器主电路系采用MOSFET所构成的H型结构形式,UPW为脉宽调制器,DLD为逻辑延时环节,GD为MOS管的栅极驱动电路,FA为瞬时动作的过流保护。脉宽调制器UPW采用美国硅通用公司(SiliconGeneral)的第二代产品SG3525,这是一种性能优良,功能全、通用性强的单片集成PWM控制器。由于它简单、可靠及使用方便灵活,大大简化了脉宽调制器的设计及调试,故获得广泛使用。四.实验设备及仪器1.MCL系列教学实验台主控制屏。2.MCL—18组件(适合MCL—Ⅱ)或MCL—31组件(适合MCL—Ⅲ)。3.MCL—10组件或MCL—10A组件。4.MEL-11挂箱5.MEL—03三相可调电阻(或自配滑线变阻器)。6.电机导轨及测速发电机、直流发电机M01(或电机导轨及测功机、MEL—13组件。7.直流电动机M03。8.双踪示波器。五.注意事项1.直流电动机工作前,必须先加上直流激磁。2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。4.系统开环连接时,不允许突加给定信号Ug起动电机。5.起动电机时,需把MEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。6.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。7.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。8.实验时需要特别注意起动限流电路的继电器有否吸合,如该继电器未吸合,进行过流保护电路调试或进行加负载试验时,就会烧坏起动限流电阻。六.实验方法采用MCL—10组件1.SG3525性能测试分别连接“3”和“5”、“4”和“6”、“7”和“27”、“31”和“22”、“32”和“23”,然后3打开面板右下角的电源开关。(1)用示波器观察“25”端的电压波形,记录波形的周期,幅度(需记录S1开关拨向“通”和“断”两种情况)(2)S5开关打向“OV”,用示波器观察“30”端电压波形,调节RP2电位器,使方波的占空比为50%。S5开关打向“给定”分别调节RP3、RP4,记录“30”端输出波形的最大占空比和最小占空比。(分别记录S2打向“通”和“断”两种情况)2.控制电路的测试(1)逻辑延时时间的测试S5开关打向“0V”,用示波器观察“33”和“34”端的输出波形。并记录延时时间。td=(2)同一桥臂上下管子驱动信号死区时间测试分别连接“7”和“8”、“10”和“11”,“12”和“13”、“14”和“15”、“16”和“17”、“18”和“19”,用双踪示波器分别测量VVT1。GS和VVT2。GS以及VVT3。GS和VVT4。GS的死区时间。td.VT1.VT2=td.VT3.VT4=注意,测试完毕后,需拆掉“7”和“8”以及“10”和“11”的连线。3.开环系统调试(1)速度反馈系数的调试断开主电源,并逆时针调节调压器旋钮到底,断开“9”、“10”所接的电阻,接入直流电动机M03,电机加上励磁。S4开关扳向上,同时逆时针调节RP3电位器到底,合上主电源,调节交流电压输出至220V左右。调节RP3电位器使电机转速逐渐升高,并达到1400r/min,调节FBS的反馈电位器RP,使速度反馈电压为2V。注:如您选购的产品为MCL—Ⅲ、Ⅴ,无三相调压器,直接合上主电源。以下均同。(2)系统开环机械特性测定参照速度反馈系数调试的方法,使电机转速达1400r/min,改变测功机加载旋钮(或直流发电机负载电阻Rd),在空载至额定负载范围内测取7—8个点,记录相应的转速n和转矩M(或直流发电机电流id)1.SG3525性能测试测试示波器观察25端电压波形,开通时,T=105.5us,V=2.22v;关断时,T=52.5us,V=2.22v。S5开关打向给定,30端输出波形,开通时,最大占空比0.5,最小0;关断时最大0.618,最小0。2.控制电路测试逻辑延时时间td=2.9us,VT1\VT2死区时间2.9us,VT3\VT4死区时间2.9us。3.开环系统调试系统开环机械特性测定正给定n(r/min)140012841235119511541105Id(A)0.210.410.560.700.850.99n(r/min)800713767642618575Id(A)0.250.410.570.720.820.994负给定n(r/min)-1400-1357-1350-1337-1306-1274Id(A)0.680.500.350.220.120.02n(r/min)-800-767-758-724-702-684Id(A)0.730.540.360.250.120.024.闭环系统调试将ASR,ACR均接成PI调节器接入系统,形成双闭环不可逆系统。按图6—11接线(1)速度调节器的调试(a)反馈电位器RP3逆时针旋到底,使放大倍数最小;(b)“5”、“6”端接入MEL—11电容器,预置5~7μF;(c)调节RP1、RP2使输出限幅为±2V。(2)电流调节器的调试(a)反馈电位器RP3逆时针旋到底,使放大倍数最小;(b)“5”、“6”端接入MEL—11电容器,预置5~7μF;(c)S5开关打向“给定”,S4开关扳向上,调节MCL-10的RP3电位器,使ACR输出正饱和,调整ACR的正限幅电位器RP1,用示波器观察“30”的脉冲,不可移出范围。S5开关打向“给定”,S4开关打向下至“负给定”,调节MCL-10的RP4电位器,使ACR输出负饱和,调整ACR的负限幅电位器RP2,用示波器观察“30”的脉冲,不可移出范围。4.系统静特性测试,机械特性正给定n(r/min)140013991394139313911388Id(A)0.200.360.490.710.861.01n(r/min)800800799799798797Id(A)0.220.370.510.690.871.00负给定n(r/min)-1400-14001398139613951394Id(A)-0.28-0.40-0.56-0.71-0.86-1.01n(r/min)-800-800-798-797-796-795Id(A)-0.22-0.36-0.51-0.73-0.85-1.00闭环控制特性正给定n(r/min)14001156943719524195Ug(v)4.864.043.312.541.860.74负给定n(r/min)-1400-1130-949-724-542-2865Id(A)-4.73-3.80-3.18-2.41-1,79-0.91思考题1.为了防坠上下桥臂直通,有人把上下桥臂驱动信号死区时间调的很大,这样做行不行,为什么?你认为死区时间长短由哪些参数决定?答:不行,死区长会影响输出波形失真,谐波成分增多。死区时间长短与功率管自身的开通、关断时间以及对输出波形要求有关2.与采用晶闸管的移相控制直流调速系统相对比,试归纳采用自关断器件的脉宽调速系统优点。答:1.功率因素高,谐波污染小;2.主电路结构简单;3开关频率高,频带宽,响应速度和稳速精度好,电枢电流容易连续;4调速范围宽实验心得与体会:通过本次实验,我们学习了掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数整定。还学习了死区时间的调节长短对输出波形的影响。以及不同晶闸管和器件之间的区别等。对双闭环脉宽调速系统的原理图有了更形象的理解,只要做到了理论联系实际,把课堂上的东西运用到做实验中来。在实验的过程中使理论实践化,提高了我们的动手能力,而且能初步分析实验过程中遇到的问题并解决他们。在做实验的过程中还有一些的不足,但坚信,通过不断的积累才会越来月熟悉。6实验二双闭三相异步电动机调压调速系统一.实验目的1.熟悉相位控制交流调压调速系统的组成与工作。2.了解并熟悉双闭环三相异步电动机调压调速系统原理。3.了解绕线试异步电动机转子串电阻时在调节定子电压调速似的机械特性。4.通过测定系统的静特性和动特性进一步了解交流调压系统中电流环和转速环的作用二.实验内容1.测定绕线试异步电动机转子串电阻时的人为机械特性。2.测定双闭环交流调压调速系统的静特性。3.测定双闭环交流调压调速系统的动态特性。三.实验设备及仪表1.教学实验台主控制屏。2.NMCL—31组件。3.NMCL—33组件4.NMEL—03三相可调电阻。5.NMCL—18组件6.NMCL—09组件2.求取调速系统在无转速负反馈时的开环工作机械特性。a.断开ASR的“3”至Uct的连接线,G(给定)直接加至Uct,且Ug调至零,直流电机励磁电源开关闭合。b.合上主控制屏的绿色按钮开关,调节三相调压器的输出,使Uuv、Uvw、Uwu=200V。注:如您选购的产品为MCL—Ⅲ、Ⅴ,无三相调压器,直接合上主电源。以下均同。c.调节给定电压Ug,使直流电机空载转速n0=1500转/分,调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载的范围内测取7~8点,读取整流装置输出电压Ud,输出电流id以及被测电动机转速n。Ud(V)210.1214.4215.5217.3217.1212.3id(A)0.5660.5220.5070.4950.4901.544n(r/min)1295132513401348135313113.带转速负反馈有静差工作的系统静特性a.断开G(给定)和Uct的连接线,ASR的输出接至Uct,把ASR的“5”、“6”点短接。b.合上主控制屏的绿色按钮开关,调节Uuv,Uvw,Uwu为200伏。c.调节给定电压Ug至2V,调整转速变换器RP电位器,使被测电动机空载转速n0=1500转/分,调节ASR的调节电容以及反馈电位器RP3,使电机稳定运行。7调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载范围内测取7~8点,读取Ud、id、n。id(A)0.5290.6000.6560.7100.7750.657Ud(V)179170163156147103n(r/min)126612301203117311319224.测取调速系统在带转速负反馈时的无静差闭环工作的静特性a.断开ASR的“5”、“6”短接线,“5”、“6”端接MEL—11电容器,可预置7μF,使ASR成为PI(比例—积分)调节器。b.调节给定电压Ug,使电机空载转速n0=1500转/分。在额定至空载范围内测取7~8个点。id(A)0.5100.5890.6630.7240.7810.958Ud(V)173163153143135102n(r/min)12351190124311001056901四.实验心得通过本次实验,我们学习了相位控制交流调压调速系统的组成与工作。对双闭环三相异步电动机调压调速系统原理有了一定的了解。了解绕线试异步电动机转子串电阻时在调节定
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 nightlotus
nightlotus
本文标题:电力拖动自动控制系统实验报告
链接地址:https://www.777doc.com/doc-1542132 .html