您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 工程监理 > 哈尔滨工程大学(电磁)-极品飞车3号技术文档
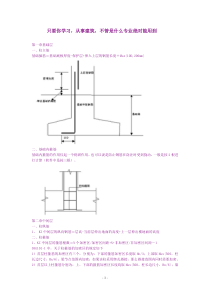
第六届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:哈尔滨工程大学队伍名称:极品飞车3号参赛队员:郭伟刘玉章刘辉带队教师:张爱筠管凤旭6关于技术报告和研究论文使用授权的说明本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。参赛队员签名:带队教师签名:日期:目录第一章引言.................................................................................................................1第二章智能汽车整体设计.........................................................错误!未定义书签。2.1设计思路及方案的总体说明.......................................................................................................32.2系统各模块实现简介....................................................................................................................4第三章机械及硬件电路设计.....................................................................................63.1机械设计.......................................................................................................................................63.1.1电磁传感器的安装................................................................................................................63.1.2舵机的安装............................................................................................................................73.1.3PCB主办的固定....................................................................................................................83.1.4测速编码器的安装................................................................................................................93.2硬件电路设计...............................................................................................................................93.2.1电磁传感器的设计................................................................................................................93.2.2PCB主板的设计..................................................................................................................123.2.3电源管理模块........................................................................................错误!未定义书签。3.2.4电机驱动.............................................................................................................................14第四章软件设计.........................................................................错误!未定义书签。4.1传感器的测量算法.....................................................................................................................174.2舵机的PD控制..........................................................................................................................184.3增量式编码器的控制.................................................................................................................194.4速度PID控制算法及其改进形式.............................................................................................19第五章开发调试过程及主要参数...........................................................................225.1开发工具......................................................................................................................................225.2制作调试过程说明......................................................................................................................225.3智能车主要技术参数.................................................................................................................23第六章结论...............................................................................................................25未来寄语...........................................................................................................................................25参考文献.....................................................................................................................27附录A原理图...........................................................................................................28附录B程序源代码....................................................................................................291第一章引言“飞思卡尔”杯全国大学生智能汽车邀请赛今年进行到第六届,过去几年经验的积累使得比赛形式丰富,比赛规则比较完善,为广大同学提供了一个良好的学习提高的平台。第五届大赛,为了拓展赛道检测形式,在原有摄像头组和光电组基础上增加了电磁组,以100mA的交变电流为赛道,自主开发检测传感器,检测赛道信息。虽然说大赛设置电磁组组别的时间仅仅两年,但在第五届前辈探索与创新之下,电磁组的成绩却有了飞跃性的进步。为响应教育部关于加强大学生的创新意识、合作精神和创新能力的培养的号召,我们组队积极参加了第六届“飞思卡尔”杯全国大学生智能汽车邀请赛电磁组的比赛。从2010年11月开始着手进行准备,历时近9个月。在第五届参赛前辈的基础上,我们传感器设计上依旧采用电感线圈检测磁场,通过在多个点布置不同方向的检测传感器获取赛道信息,利用所获取的信号进行处理,实现对赛车转向、速度进行控制。同时,我们利用前几届比赛积累下的经验,继续加强在电源管理、噪声抑制、驱动优化、整车布局等方面的研究工作,使智能车能够满足高速运行下的动力性和稳定性需求,获得了良好的综合性能和赛场表现。在设计的过程中,我们参考了很多文献资料。在组装车模和电路设计等过程中,我们的实践动手能力得到了极大的培养和提高。在设计智能车控制算法过程中,我们设计使用了多种控制算法,如舵机的PD算法和电机的PI算法。期间进行了无数次的实践和尝试,形成了最后的比赛方案。在思考控制算法的过程中,我们一直在追求稳、快的目标,在这个过程中我们的创造能力和实践能力得到了很大的提高。第六届全国大学生智能汽车邀请赛技术报告2本技术报告将针对我们的传感器信号处理设计安装、底盘参数选择、电路设计、HCS12控制软件主要理论、控制算法等方面进行阐述,并列出了模型车的主要技术参数。关键字:路径识别,智能车,PID,电磁传感器3第二章智能汽车整体设计本电磁智能车模型采用B型车模,通过电磁传感器阵列来采集电流约为20KHz、100mA的导线的电磁场强度来检测和识别路径,通过MC9S12XS128的AD口进行采集、处理,进而控制电机和舵机,进行模型车的智能控制。2.1设计思路及方案的总体说明根据电磁车循迹的要求,电磁车设计包括赛车的设计和恒流源的设计。根据电磁传感器方案设计,赛车共包括五大模块:电磁传感器模块、速度传感器、MC9S12XS128模块,电机驱动模块、电源管管理模块。图2.1系统方案框图电磁传感器获取赛道当前点电磁特性,信号输入到S12控制核心,进行进一步处理以获得赛道信息;通过光电编码器转速传感器检测车速,并采用S12的第六届全国大学生智能汽车邀请赛技术报告4输入捕捉功能进行脉冲计数计算车速和路程;舵机转向采用分段PID控制;电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的功率。2.2系统各模块实现简介1、电磁传感器模块检测导线电流约为100mA,频率20KHz的磁
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码







 yzdnnn
yzdnnn
本文标题:哈尔滨工程大学(电磁)-极品飞车3号技术文档
链接地址:https://www.777doc.com/doc-174608 .html