您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 高增益观测器的分离定理
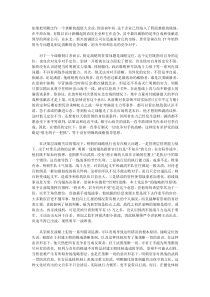
1高增益观测器针对如下系统模型1221(,,,)xxxxuwdyxv(1)其中12xxx是状态向量,u是系统输入,d是干扰向量,w是已知的外部信号,对,xu满足局部李普希茨条件,在,dw上连续。假设状态反馈控制律,uxw。为了仅使用输出测量信号作为控制器输入,设计高增益观测器如下1211221ˆˆˆ()ˆˆˆˆ(,,,)()xxhyxxxuwdhyx(2)其中122h,1,12,满足Hurwitz条件,函数ˆ是系统非线性部分的标称模型。在充分小且为正的时候,观测器是指数收敛的。在高增益观测器的应用方面,分离定理的证明使之应用有了理论根据。根据分离定理,在系统满足一定条件时,在使用高增益观测器控制非线性系统时,分两步设计,首先设计状态反馈控制器,然后设计高增益观测器,在高增益观测器和系统非线性函数满足一定条件下,可以把观测器观测值和状态反馈替换,并可以保证控制系统的稳定性。这表明当高增益观测器的增益足够大的时候,输出反馈控制器能够重现状态反馈控制器的性能。以式(2)为例,分离定理要求212ss满足Hurwitz条件[62]。根据文献[65]高增益观测器在控制系统中的应用,当控制系统和观测器满足一定条件下,则可以使用高增益观测器的观测值取代状态值。2高增益观测器分离定理考虑多输入-多输出非线性系统=qxAxBxzuzxzuy=Cxxz(3)其中puR是控制输入,myR和sR是被测输出,xR和zR构成了状态向量,矩阵A,m矩阵B和m矩阵C分别为110=blockdiag,,,00iimmiIAAAA1100=blockdiag,,,01imiBBBB11=blockdiag,,,100imiCCCC其中1im,1=++m,代表m个积分器链,函数,和q对其自变量,,pxzDDxzuR是利普希茨的,pxDR和szDR为包含各原点的定义域,此外q,,在其原点的值为零。假设有状态反馈控制器,,,,xζuxζ(4)其中,在定义域内是其自变量的局部利普希茨函数,是x的全局有界函数,且在原点函数值为零。去掉系统状态方程,并把控制器方程与之合并,可将闭环控制系统表示为:=χfχ(5)其中,,χ=xz。设计高增益观测器观测系统状态:(6)其中观测器的增益H为111/=blockdiag,,,/iimiiHHHH,是指定的正常数,选择正常数ij使得对于所有的1,,im,方程1110iiiiiiisss的根在左半开平面,0是的标称模型,要求在定义域内是对其自变量是局部利普希茨的,对x是全局有界,且在原点为零。则有如下定理[67]。高增益观测器分离定理:假设式(5)在其原点是指数稳定的,在的原点邻域内,存在1,对于任何1,闭环系统在原点是指数稳定的。此定理说明在充分小的时候,使用高增益观测器的值代替状态值,输出反馈控制能够重现状态反馈控制的性能。这就为高增益观测器的应用提供了理论依据。将以上结论总结为如下的三个假设和三个输出反馈控制系统设计步骤。假设一:状态反馈控制系统式(3)和式(4)是指数稳定的。假设二:满足局部李普希茨条件,并且在原点函数值为零,并且是连续可导的。假设三:,满足局部李普希茨条件,并且在原点函数值为零。在以上三个假设的前提下,遵循以下三步设计控制系统:第一步,设计状态反馈控制器,保证闭环控制系统指数稳定。第二步,设计高增益观测器第三步,使用高增益观测器的观测值取代状态值。则整个基于高增益观测器的闭环控制系统是渐进稳定的。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 lww791105
lww791105
本文标题:高增益观测器的分离定理
链接地址:https://www.777doc.com/doc-1934866 .html