您好,欢迎访问三七文档
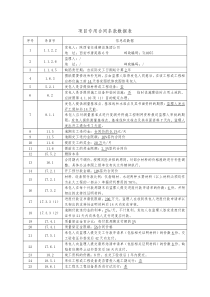
计算力学课程设计说明书班级姓名学号日期2015年12月25日计算力学课程设计1安徽理工大学理学院桁架的有限元计算方法引言有限元分析是求取复杂微分方程近似解的一种非常有效的工具,是现代数字化科技的一种重要的基础性原理。将它应用于工程技术中,可成为工程设计和分析的可靠工具。而在桁架结构中,运用有限元的方法,通过现代有限元分析软件如MATLAB,ANSYS等可轻易的求得各个杆件的内力等。例如下图的桁架结构,运用有限元法可十分清晰的了解各杆件的受力状况。1基本力学模型如下图1所示图12有限元计算原理首先,明确Matlab程序要实现的5个重要模块分别为:单元刚度矩阵的求解、单元组装、节点位移的求解、单元应力的求解、节点力的求解。下面给出这5个模块的实现。(1)单元刚度矩阵求解定义函数Bar2D2Node_Stiffness,该函数计算单元的刚度矩阵,输入弹性模量E,横截面积A,两个节点坐标输出单元刚度矩阵k(4X4)。具体代码如下:functionk=Bar2D2Node_Stiffness(E,A,x1,y1,x2,y2)L=sqrt((x2-x1)*(x2-x1)+(y2-y1)*(y2-y1));x=acos((x2-x1)/L);C=cos(x);计算力学课程设计2安徽理工大学理学院S=sin(x);k=E*A/L*[C*CC*S-C*C-C*S;C*SS*S-C*S-S*S;-C*C-C*SC*CC*S;-C*S-S*SC*SS*S];(2)单元组装定义函数Bar2D2Node_Assembly,该函数进行单元刚度矩阵的组装,输入单元刚度矩阵k,单元的节点编号i、j。输出整体刚度矩阵KK,具体代码如下:functionz=Bar2D2Node_Assembly(KK,k,i,j)DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;forn1=1:4forn2=1:4KK(DOF(n1),DOF(n2))=KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;(3)节点位移的求解定义函数Bar2D2Node_Disp(KK,num,p),该函数输入KK为总体刚度矩阵;num为活动自由度编号数组;p为活动自由度方向上的节点力;输出节点位移列阵。具体代码如下:functionu=Bar2D2Node_Disp(KK,num,p)k=KK(num,num);u=k\p;(4)单元应力的求解定义函数函数Bar2D2Node_Stress(E,x1,y1,x2,y2,u),该函数计算单元的应力输入弹性模量E,第一个节点坐标(x1,y1),第二个节点坐标(x2,y2)单元节点位移矢量u,返回单元应力标量stress。具体代码如下:functionstress=Bar2D2Node_Stress(E,x1,y1,x2,y2,u)L=sqrt((x2-x1)*(x2-x1)+(y2-y1)*(y2-y1));x=acos((x2-x1)/L);C=cos(x);S=sin(x);stress=E/L*[-C-SCS]*u;(5)计算节点力定义函数Bar2D2Node_Forces(KK,q),该函数用于计算节点力,KK为刚度矩阵,q为节点位移阵列。functionP=Bar2D2Node_Forces(KK,q)计算力学课程设计3安徽理工大学理学院P=KK*q;以上5个函数写入MATLAB的M文件中完成函数的定义,以备命令窗口的调用。至此,基于MATLAB的杆单元有限元分析的程序设计的准备工作已经完成。3计算结果及分析针对上面的具体模型运用MATLAB实现有限元的计算:(1)结构的离散化与编号对该结构进行自然离散,节点编号和单元编号如上图所示(2)计算各单元的刚度矩阵(基于国际标准单位)输入弹性模量E、横截面积A,各点坐标。然后分别针对单元1,2,3和4,调用4次Bar2D2Node_Stiffness,就可以得到单元的刚度矩阵。对应的主程序中代码:E=2.95e11;A=0.0001;x1=0;y1=0;x2=0.4;y2=0;x3=0.4;y3=0.3;x4=0;y4=0.3;k1=Bar2D2Node_Stiffness(E,A,x1,y1,x2,y2)k2=Bar2D2Node_Stiffness(E,A,x2,y2,x3,y3)k3=Bar2D2Node_Stiffness(E,A,x1,y1,x3,y3)k4=Bar2D2Node_Stiffness(E,A,x4,y4,x3,y3)计算结果如下图2单元1与单元2的刚度矩阵计算力学课程设计4安徽理工大学理学院图3单元3与单元4的刚度矩阵(3)建立整体刚度方程由于该结构共有4个节点,因此,设置结构总的刚度矩阵为KK(8×8),先对KK清零,然后四次调用函数Bar2D2Node_Assembly进行刚度矩阵的组装。相关主程序代码为:KK=zeros(8,8);%由于该结构共有4个节点,因此,结构总的刚度矩阵为KK(8×8),先对K清零,然后四次调用函数Bar2D2Node_Assembly进行刚度矩阵的组装。KK=Bar2D2Node_Assembly(KK,k1,1,2);KK=Bar2D2Node_Assembly(KK,k2,2,3);KK=Bar2D2Node_Assembly(KK,k3,1,3);KK=Bar2D2Node_Assembly(KK,k4,4,3);结果如下计算力学课程设计5安徽理工大学理学院图4整体刚度矩阵(4)边界条件的处理及刚度方程的求解由图可以看出,被约束的自由度有:节点1的x,y方向自由度,节点2的y方向自由度,4节点的x、y方向两个自由度。则活动自由度编号为3,5,6.活动自由度对应的节点载荷F3=20000N,F5=0N,F6=25000N,采用高斯消去法进行求解,对应的代码为:num=[3,5,6];%可活动的自由度编号p=[20000;0;-25000];u=Bar2D2Node_Disp(KK,num,p)结果如下由此可知u2=0.2712*10^-3,u3=0.0565*10^-3,v3=-0.2225*10^-3。(5)支反力的计算在得到整个结构的节点位移后,由原整体刚度方程就可以计算出对应的支反力。这部分对应的主程序的代码如下:q=zeros(8,1);q(num)=u;%节点位移阵列P=Bar2D2Node_Forces(KK,q)结果如下计算力学课程设计6安徽理工大学理学院由此可知支反力为FRX1=-15833N,FRY1=3125N,FRY2=21879N,FRX4=-4167N,FRY4=0N。(6)单元应力的计算先从整体位移列阵q中提取出单元的位移列阵,然后,调用计算单元应力的函数Bar2D2Node_Stress,就可以得到各个单元的应力分量。u1=[q(1);q(2);q(3);q(4)]stress1=Bar2D2Node_Stress(E,x1,y1,x2,y2,u1)u2=[q(3);q(4);q(5);q(6)]stress2=Bar2D2Node_Stress(E,x2,y2,x3,y3,u2)u3=[q(1);q(2);q(5);q(6)]stress3=Bar2D2Node_Stress(E,x1,y1,x3,y3,u3)u4=[q(7);q(8);q(5);q(6)]stress4=Bar2D2Node_Stress(E,x4,y4,x3,y3,u4)结果如下:stress1=200000000,stress2=-2.1875e+008,stress3=-5.2083e+007,stress4=4.1667e+007参考文献[1]曾攀.有限元基础教程.北京:高等教育出版社2009,7[2]王勖成.有限单元法.北京:清华大学出版社,2003,7.附录(程序)子程序1:functionk=Bar2D2Node_Stiffness(E,A,x1,y1,x2,y2)L=sqrt((x2-x1)*(x2-x1)+(y2-y1)*(y2-y1));计算力学课程设计7安徽理工大学理学院x=acos((x2-x1)/L);C=cos(x);S=sin(x);k=E*A/L*[C*CC*S-C*C-C*S;C*SS*S-C*S-S*S;-C*C-C*SC*CC*S;-C*S-S*SC*SS*S];子程序2:functionz=Bar2D2Node_Assembly(KK,k,i,j)DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;forn1=1:4forn2=1:4KK(DOF(n1),DOF(n2))=KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;子程序3:functionu=Bar2D2Node_Disp(KK,num,p)k=KK(num,num);u=k\p;子程序4:functionstress=Bar2D2Node_Stress(E,x1,y1,x2,y2,u)L=sqrt((x2-x1)*(x2-x1)+(y2-y1)*(y2-y1));x=acos((x2-x1)/L);C=cos(x);S=sin(x);stress=E/L*[-C-SCS]*u;子程序5:functionP=Bar2D2Node_Forces(KK,q)P=KK*q;主程序:E=2.95e11;A=0.0001;x1=0;y1=0;x2=0.4;y2=0;x3=0.4;y3=0.3;计算力学课程设计8安徽理工大学理学院x4=0;y4=0.3;k1=Bar2D2Node_Stiffness(E,A,x1,y1,x2,y2)k2=Bar2D2Node_Stiffness(E,A,x2,y2,x3,y3)k3=Bar2D2Node_Stiffness(E,A,x1,y1,x3,y3)k4=Bar2D2Node_Stiffness(E,A,x4,y4,x3,y3)KK=zeros(8,8);KK=Bar2D2Node_Assembly(KK,k1,1,2);KK=Bar2D2Node_Assembly(KK,k2,2,3);KK=Bar2D2Node_Assembly(KK,k3,1,3);KK=Bar2D2Node_Assembly(KK,k4,4,3)num=[3,5,6];p=[20000;0;-25000];u=Bar2D2Node_Disp(KK,num,p)q=zeros(8,1);q(num)=u;P=Bar2D2Node_Forces(KK,q)u1=[q(1);q(2);q(3);q(4)];stress1=Bar2D2Node_Stress(E,x1,y1,x2,y2,u1)u2=[q(3);q(4);q(5);q(6)];stress2=Bar2D2Node_Stress(E,x2,y2,x3,y3,u2)u3=[q(1);q(2);q(5);q(6)];stress3=Bar2D2Node_Stress(E,x1,y1,x3,y3,u3)u4=[q(7);q(8);q(5);q(6)];stress4=Bar2D2Node_Stress(E,x4,y4,x3,y3,u4)
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 jy02393346
jy02393346
本文标题:计算力学课程设计
链接地址:https://www.777doc.com/doc-2041648 .html