您好,欢迎访问三七文档
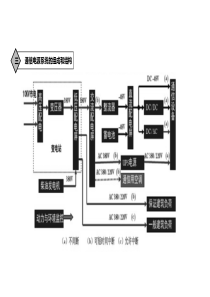
超声波传感器1、概述声波是一种能在气体、液体和固体中传播的机械波。根据振动频率的不同,可分为次声波、声波、超声波和微波等。次声波的振动频率低于l6Hz的机械波;声波的振动频率在16~20KHz之间的机械波,在这个频率范围内能为人耳所闻;超声波的振动频率高于20KHz的机械波。超声波与一般声波比较,它的振动频率高,而且波长短,因而具有束射特性,方向性强,可以定向传播,其能量远远大于振幅相同的一般声波,并且具有很高的穿透能力。PING超声波传感器如图1所示,主要由超声波发射器和超声波接收器两部分组成,它们都是利用压电材料(如石英、压电陶瓷等)的压电效应进行工作的。利用逆压电效应将高频电振动转换成高频机械振动,产生超声波,以此作为超声波的发射器。而利用正压电效应将接收的超声振动波转换成电信号,以此作为超声波的接收器。图1PING超声波传感器2、性能参数:LED显示实时工作状态;工作电压:5V;工作电流:30mA典型,35mA最大;工作频率:40KHz;最大探测距离:3m;最小探测距离:2cm;输入触发器:上升沿触发;回波脉冲:正TTL高电平脉冲宽度.;下一次测量的延时:20ms;重量:0.9g;尺寸(长x宽x高):22mmx46mmx16mm。3、接线说明(1)电路连接图,如图2所示:图2电路连接图(2)安装接线图,如图4所示:该传感器安装云台包含一个0~180°旋转的伺服电机(舵机)和铝合金支架以及安装螺丝如图3所示。将云台安装在宝贝车机器人(或其它机器人)上,把超声波传等感器安装在云台上,即可以在程序的控制下对0~180°的环境进行快速扫描,以辨别障碍物的距离。利用获取的信息,您可以有效地、尽可能避免障碍物,从而导航机器人,或者紧跟您想跟踪的目标。图3图4安装接线图4、工作原理超声波传感器的测距原理:超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。设超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离S,即:S=340t/2该超声波的发射波频率是40KHz,传感器实际上是由单片机来控制工作的:发射探头发射一组5个超声波脉冲后,输出电平由高电平转为低电平;等到接收探头接收到足够强度的反射超声波信号时,输出信号由低电平转为高电平。所以在实验的过程中,可以观察到随着反射板到探头的距离变化,传感器输出波形的“脉冲”宽度也会对应的发生变化,测试距离越远,脉冲的宽度越宽。因此,计算出脉冲的宽度就可以计算出反射板到探头的距离。发射的两组脉冲间隔时间约为18ms,对应的测试距离为3.069m。所以,该型号的超声波传感器的最远测试距离是3米。为了消除发射电路强电磁脉冲对接收电路的影响,在发射电路发射脉冲后,接收电路需延时大约1ms,才能正常接收信号。在设计中为保险起见,这个时间被设计成1ms,对应的最短测试距离约为2cm,所以PING超声波传感器的测试范围在0.02~2.5米是有技术保证的。另外,空气中的声音传播速度不是一个固定的值,通常我们所认为的340m/s是一个大概的数据,在不同的温度下这个数据会有一些变化。其传播速度的修正公式为S=331.4×(1+t/273)^0.5,t为空气温度。作为常温下的测试,可以就认为声速为346m/s(按25℃计算)。超声波传感器的工作原理图,如图5所示:图5超声波传感器工作原如图3所示,使用超声波传感器进行测量,需要测量声波返回的时间,然后根据声速再空气中的传播公式,求出探测物体与超声波传感器之间的距离。5、程序流程图,如图6所示:主程序如下:图6程序流程图6、程序说明如图7所示,给SIG引脚输入一个高电平的脉冲,经过5μs左右,SIG引脚自动降为低电平。当检测到SIG引脚为高电平时,表示声波发射,低电平表示检测到返回的超声波。则Tin即为所需时间。图7程序说明图
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 yamakasiq
yamakasiq
本文标题:超声波传感器20
链接地址:https://www.777doc.com/doc-2042309 .html