您好,欢迎访问三七文档
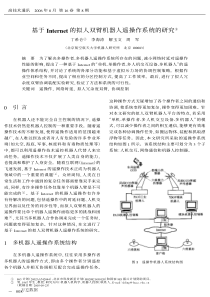
西南大学自动化概论(课程论文)学号:22201232270048专业:自动化学员姓名:唐旖婕任课教员:祝诗平2014年12月自动控制理论发展历史唐旖婕摘要:根据控制理论的理论基础及所能解决的问题的难易程度,我们把控制理论大体的分为了三个不同的阶段。这种阶段性的发展过程是由简单到复杂、由量变到质变的辩证发展过程。通过对不同时期,不同阶段的理论研究成果的简要介绍,掌握经典控制理论、现代控制理论、大系统理论和智能控制系统理论知识理论框架,进而加深对自动化控制理论认知。关键词:自动控制理论;产生与发展过程;自动控制理论是与人类社会发展密切联系的一门学科,是自动控制科学的核心。自从19世纪Maxwell对具有调速器的蒸汽发动机系统进行线性常微分方程描述及稳定性分析以来,经过20世纪初Nyquist,Bode,Harris,Evans,Wienner,Nichols等人的杰出贡献,终于形成了经典反馈控制理论基础,并于50年代趋于成熟。经典控制理论的特点是以传递函数为数学工具,采用频域方法,主要研究“单输入—单输出”线性定常控制系统的分析与设计。但它存在着一定的局限性,即对“多输入—多输出”系统,不宜用经典控制理论解决,特别是对非线性、时变系统更是无能为力。随着20世纪40年代中期计算机的出现及其应用领域的不断扩展,促进了自动控制理论朝着更为复杂也更为严密的方向发展,特别是在Kalman提出的可控性和可观测性概念以及Понтрягин提出的极大值理论的基础上,在20世纪50、60年代开始出现了以状态空间分析(应用线性代数)为基础的现代控制理论。现代控制理论本质上是一种“时域法”,其研究内容非常广泛,主要包括三个基本内容:多变量线性系统理论、最优控制理论以及最优估计与系统辨识理论。现代控制理论从理论上解决了系统的可控性、可观测性、稳定性以及许多复杂系统的控制问题。1经典控制理论经典控制理论,是以传递函数为基础,在频率域对单输入---单输入控制系统进行分析与设计的理论[4]1、控制系统的特点单输入——单输出系统的,线性定常或非线性系统中的相平面法也只含两个变量的系统。2、控制思路基于频率域内传递函数的“反馈”和“前馈”控制思想,运用频率特性分析法、根轨迹分析法、描述函数法、相平面法、波波夫法,解决稳定性问题。3、发展事件回顾[4][5]1)我国古人发明的指南车就应用了反馈的原理。2)1788年瓦特(J.Watt)在发明蒸汽机的同时应用了反馈思想设计了离心式飞摆控速器,这是第一个反馈系统的方案。3)1868年麦克斯韦(J.C.Maxwell)为解决离心式飞摆控速器控制精度和稳定性之间的矛盾,发表《论调速器》,提出了用基本系统的微分方正模型分析反馈系统的数学方法。4)1875年劳斯(E.J.Routh)和赫尔维茨(A.Hurwitz)提出了根据代数方程的系数判断线性系统稳定性方法5)1876年俄国学者维什涅格拉诺基发表著作《论调速器的一般理论》,对调速器系统进行了全面的理论阐述。6)1895年劳斯与赫尔维茨分别提出了基于特征特征根和行列式的稳定性代数判别方法。7)1927年布莱克(H.S.Black)发现了采用负反馈线路的放大器,引入负反馈后,放大器系统对扰动和放大器增益变化的敏感性大为降低。8)1932年奈奎斯特(H.Nyquest)采用频率特性表示系统,提出了频域稳定性判据,很好地解决了Black放大器的稳定性问题,而且可以分析系统的稳定裕度,奠定了频域法分析与综合的基础。9)1934年,哈森(H.L.Hazen)发表《关于伺服机构理论》10)1938年,维哈伊洛夫发表《频域法》,这标志着经典控制理论的诞生。11)1945年,伯德(H.W.Bode)发表了著作《网络分析和反馈放大器设计》,完善了系统分析和设计的频域方法。并进一步研究,开发了伯德图。12)1948年,维纳(N.Weiner)发表了《控制论——关于在动物和机器中控制和通讯的科学》一书,标志着控制论的诞生。13)1948年,伊万斯(W.R.Evans)提出了系统的根轨迹分析法,是一种易于工程应用的,求解闭环特征方程根的简单图解法。进一步完善了频域分析方法。14)1954年,钱学森出版了《工程控制论》,全面总结了经典控制理论,标志着经典理论的成熟。4、主要成果PID控制规律的产生,PID控制原理简单易于实现,具有一定的自适应性与鲁棒性,对于无时间延迟的单回路控制系统很有效,在工业过程控制中任然被广泛应用。2现代控制理论现代控制理论,基于时域内的状态空间分析法,着重时间系统最优化控制的研究。1、控制系统的特点为多输入——多输出系统,系统可以是线性或非线性,定常或时变的,单变量与多变量,连续与离散系统。2、控制思路基于时域内的状态方程与输出方程对系统内的状态变量进行实施控制,运用极点配置、状态反馈、输出反馈的方法,解决最优化控制、随机控制、自适应控制问题。3、发展事件回顾[3]1)1959年,苏联学者庞德亚金(L.S.Pontryagin)等学者创立了极大值原理,并找出最优控制问题存在的必要条件,该理论解决控制量有约束情况下的最短时间控制问题,提供方法。2)1953-1957年间,美国学者贝尔曼(R.Bellman)创立了解决最优控制问题的动态规律,并依据最优性原理,发展了变分学中的Hamilton-Jaccobi理论。3)1959年,卡尔曼(R.E.Kalman)提出了滤波器理论,1960年卡尔曼对系统采用状态方程得描述方法,提出了系统的能控性、能观测性。证明了二次型性能指标下线性系统最有控制的充分条件,进而提出了对于估计与预测有效地卡尔曼滤波,证明了对偶性。4)罗森布洛克(H.H.Rosenbrock)、欧文斯(D.H.Owens)和麦克法轮(G.J.MacFarlane)研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。5)20世纪70年代奥斯特隆姆(Astrom,K.J)和朗道(L.D.Landau)在自适应控制理论和应用反面做出了贡献。4、主要成果现代控制理论的提出,促进了非线性控制、预测控制、自适应控制、鲁棒性控制、智能控制等分支学科的发展。进而为解决因工业过程的复杂性而带来的困难。3后现代控制理论后现代控制理论主要分两部分,大系统理论,代表着控制论向广度发展,是指规模庞大、结构复杂、变量众多、关联严重、信息不完备的信息与控制系统[4]智能控制系统,代表着控制论向高度发展,是具有某些仿人智能的工程控制与信息处理系统,其中最典型的是智能机器人。1、控制系统的特点是指众多因素复杂的控制系统,如宏观经济系统、资源分配系统、生态和环境系统、能源系统等。[5]2、控制思路基于时域法为主,通过大系统的多级递阶控制、分解—协调原理、分散最优控制和大系统模型降阶理论,解决大系统的最优化。[5]3、发展事件回顾[6]1)60年代初期,史密斯(Smith)提出采用性能模式识别器来学习最优控制法以解决复杂系统的控制问题。2)1965年扎德(Zadeh)创立模糊集和论,为解决负载系统的控制问题提供了强有力的数学工具。3)1966年,孟德尔(Mendel)提出了“人工智能控制”的概念。4)1967年,Leondes和Mendel正式使用“智能控制”,标志着智能控制思路已经形成。70年代初期,傅京孙、Gloriso和Saridis提出分级递阶智能控制。并成功应用于核反应、城市交通控制领域。5)70年代中期,Mamdani创立基于模糊语言描述控制规则的模糊控制器,并成功用于工业控制。6)80年代以来专家系统、神经网络理论及应用对智能控制器着促进作用现代控制理论、经典控制理论和大系统理论对比表如图1.1所示。表1.1各阶段理论比较经典控制理论现代控制理论大系统理论对象单输入-单输出线性定常系统线性与非线性、定常与时变、单变与多变量、连续与离散系统规模庞大、结构复杂、变量众多、关联严重、信息不完备的信息系统方法频域法时域矩阵法时域法数学工具拉氏变换矩阵与向量空间理论控制论、运筹学数学模型传递函数状态方程与输出方程子系统基本内容时域法、频域法、根轨迹法、描述函数法、相平面法、代数与几何稳定判据、校正网络设计、Z变化法线性系统基础理论(包括系统的数学模型、运动的分析、稳定性的分析、能控性与能观测性、状态反馈与观测器)、系统辨识、最优控制、自适应控制、最优滤波及鲁棒性控制。多级递阶控制,分解-协调原理、分散最优控制、大系统型模降阶理路主要问题稳定性性问题最优化问题系统的最优化控制装置无源与有源RC网络数字计算机数字计算机着眼点输出状态方程与输出方程大系统的最优化评价具体情况具体分析,适宜处理较简单系统的控制问题具有优越性,更适合处理复杂系统的控制问题应用控制和管理的思路,适用于多学科交叉综合的研究控制领域总体来说,“自动控制理论”就是一门研究自动控制系统稳定性的科学,是控制理论与控制工程学科的主要内容。控制理论与控制工程作为一门学科,研究并且提出有关自动控制系统设计和分析的理论与方法,用于指导工程实践。[7]参考文献:[1]维纳著,郝季仁译.控制论科学出版社,1961[2]项国波.控制论的发展北京:电器时代,2005.(11)[3]于长官.现代控制理论(第三版)哈尔滨工业出版社2006.[4]顾幸生,刘漫丹,张凌波.现代控制理论及应用华东理工大学出版社2008.[5]吕永波.系统工程北京:清华大学出版社[6]张岳,白霞,孙晓红.自动控制原理北京:清华大学出版社[7]张晓江,方敏.“自动控制理论”教学内容发展历程与优化措施北京:中国电力教育出版社,2010.(1)
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

![[操作流程及成果标准]万科集团项目设计成果标准-第一到第五部](/doc-98949.png)




 cavenying
cavenying
本文标题:自动控制理论发展史
链接地址:https://www.777doc.com/doc-2051240 .html