您好,欢迎访问三七文档
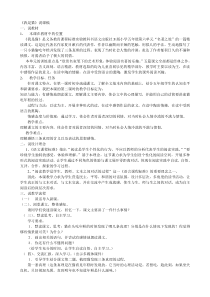
黑龙江大学实验报告课程名称运动控制专题实验实验项目名称步进电动机实验实验时间年月日时分到时分专业自动化学生所在学院电子工程学院年级学号姓名指导教师王丁实验室名称S—509实验成绩预习情况操作技术实验报告附加:综合创新能力实验综合成绩教师签字一.实验目的1.加深了解步进电动机的驱动电源和电机的工作情况。2.步进电动机基本特性的测定。二.预习要点1.了解步进电动机的驱动电源和工作情况。2.步进电动机有基本特性?怎样测定?三.实验项目1.单步运行状态。2.角位移和脉冲数的关系。3.空载实跳频率的测定。4.空载最高连续工作频率的测定。5.转子振荡状态的观察。6.定子绕组中电流和频率的关系。7.平均转速和脉冲频率的关系。8.矩频特性的测定及最大静力矩特性的测定。四.实验设备及仪器1.教学实验台主控制屏2.电机导轨及测功机(NMEL-13)3.步机电机驱动电源(NMEL-10)4.步进电机M105.双踪示波器(自备)6.直流电流表五.实验方法及步骤1.驱动波形观察a.合上控制电源船形开关,依次按下“连续”控制开关和“正转/反转”、“三拍/六拍”,“启动/停止”开关,使电机处于三拍正转连续运行状态。b.用示波器观察电脉冲信号输出波形(CP波形),改变“调频”电位器旋钮,频率变化范围为5HZ~1KHZ,可从频率计上读出此频率。c.用示波器观察环形分配器输出的三相A、B、C波形之间的相序及其与CP脉冲波形之间的关系。La图6-1步进电机实验接线图LbLcRiCPABCOFFONM:步进电机G转矩、转速的测量与控制d.改变电机运行方式,使电机处于正转、六拍运行状态,重复C的实验。(注意,每次改变电机运行,均需先弹出“启动/停止”开关,再按下“复位”按钮,再重新起动。)e.再次改变电机运行方式,使电机处于反转状态,重复C的实验。2.步进电机特性的测定和动态观察。按图6-1接线,注意接线不可接错,测功机和步进电机脱开,且接线时需断开控制电源。a.单步运行状态接通电源,按下述步骤操作:按下“单步”琴键开关,“复位”按钮,“清零”按钮,最后按下“单步”按钮。每按一次“单步”按钮,步进电机将走一步距角,绕组相应的发光管发亮,不断按下“单步”按钮,电机转子也不断作步进运行,改变电机转向,电机作反向步进运动。b.角位移和脉冲数的关系按下“置数”琴键开关,给拔码开关预置步数,分别按下“复位”、“清零”按钮(操作以上步骤须让电机处于停止状态),记录电机所处位置。按下“启动/停止”开关,电机运转,观察并记录电机偏转角度,填入表6-1。再重新预置步数,重复观察并记录电机偏转角度,填入表6-1,并利用公式计算电机偏转角度与实际值是否一致。表6-1序号预置步数实际转子偏转角度理论电机偏转角度12进行上述实验时,若电机处于失步状态,则数据无法读出,须调节“调频”电位器,寻找合适的电机运转速度,使电机处于正常工作状态。c.空载突跳频率的测定电机处于连续运行状态,按下“启动/停止”开关,调节“调频”电位器旋钮使频率逐渐提高。弹出“启动/停止”开关,电机停转,再重新起动电机,观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率,记为HZ。d.空载最高连续工作频率的测定。步进电机空载连续运转后,缓慢调节“调频”电位器旋钮,使电机转速升高,仔细观察电机是否不失步,如不失步,则继续缓慢提高频率,直至电机停转,则该频率为步进电机最高连续工作频率,记为为HZ。e.转子振荡状态的观察。步进电机脉冲频率从最低开始逐步上升,观察电机的运行情况,有无出现电机声音异常或电机转子来回偏转,即出现步进电机的振荡状态。f.定子绕组中电流和频率的关系。电机在空载状态下连续运行,用示波器观察取样电阻R波形,即为控制绕组电流波形,改变频率,观察波形的变化。在停机条件下,将测功机和步进电机同轴联接,起动步进电机,并调节MEL-13的“转矩设定”电位器,观察定子绕组电流波形。g.平均转速和脉冲频率的关系电机处于连续运行状态,改变“调频”旋钮,测量频率f(由频率计读出)与对应的转速n,则n=f(f),填入表6-2中。表6-2序号f(HZ)n(r/min)12345h.矩频特性的测定。电机处于连续空载运行状态,缓慢顺时针调节“转矩设定”旋钮,对电机逐渐增大负载,直至电机失步,读出此时的转矩值。改变频率,重复上述过程得到一组与频率f对应的转矩T值,即为步进电机的矩频特性T=f(f),记录于表6-3中。表6-3序号f(HZ)T(N.m)12345i.静力矩特性T=f(I)断开电源,将直流安培表(5A量程档)串入控制绕组回路中,将“单步”控制琴键开关和“三拍/六拍”开关按下,用起子将测功机堵住。合上船形开关,按下“复位”按钮,使C相绕组通电,缓慢转动步进电机手柄,观察MEL-13转矩显示的变化,直至测功机发出“咔嚓”一声,转矩显示开始变小,记录变小前的力矩,即为对应电流I的最大静力矩Tmax的值。改变“电流调节”旋钮,重复上述过程,可得一组电流I值及对应I值的最大静力矩Tmax值,即为Tmax=f(I)静力矩特性。可取4-5组记录于表6-4中。表6-4序号I(A)Tmax(N.m)12345实验时,为提高精确度,同一电流下,可重复3次取其转矩的平均值,每次转动步进电机手柄前,应先前测功机堵转起子拿出,待测功机回零后,再重新将起子插入测功机堵转孔中。六.实验报告对上述实验内容进行总结,并加以分析。1.步进电机处于三拍、六拍不同状态时,驱动波形的关系。2.单步运行状态:步距角=3.角位移和脉冲数关系:4.空载突跳频率:5.空载最高连续工作频率:6.平均转速和脉冲频率的特性n=f(f)。7.矩频特性T=f(f)。8.最大静力矩特性Tmax=f(I)。七.思考题1.影响步进电机步距的因素有哪些?采用何种方法步距最小?2.平均转速和脉冲频率的关系怎样?为什么特别强调是平均转速?3.最大静力矩特性是怎样的特性?4.如何对步进电机的矩频特性进行改善?八.注意事项步进电机驱动系统中控制信号部分电源和功放部分电源是不同的,绝不能将电机绕组接至控制信号部分的端子上,或将控制信号部分端子和电机绕组部分端子以任何形式连接。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 bbily1984
bbily1984
本文标题:第4个实验
链接地址:https://www.777doc.com/doc-2116017 .html