您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 工程监理 > 测绘工程专业英语翻译(英文版)
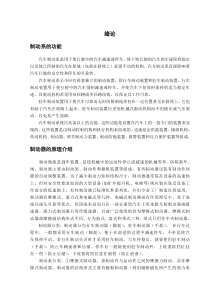
1一种基于二维图像信息的三维地形测量翻译:杜雷班级:测绘一班学号:201314420130【摘要】研究目的:利用数字图像测量技术对河流模型实验中的河床地形测量研究。创新要点:以高质量的图像径向畸变校正为基础,依据多幅图像间映射换算以及单幅图像灰度信息变换两方面的研究,来提取三维地形信息。研究方法:使用考虑残差的一阶误差传播的最大似然估计方法求解图像与地形坐标的映射变换参数;借助漫反射光照模型,通过适当假设,推导出地形高程与图像灰度、灰度梯度及太阳方向的关系式。重要结论:1.以Devernay基于直线的图像畸变校正方法为基础,通过使用更高精度的Canny边缘检测算子提取图像边缘,黄金分割法和二次插值法相结合的最优化方法求取畸变系数等,可以得到较好的校正效果,求算的畸变系数精度更高,求算过程更快;2.利用图像与地面间的透视投影关系方法求解地形高程坐标,均匀并尽可能多地将控制点布置在控制区域内,使计算值更接近实测值,并满足河流演变实验的精度要求;3.通过推导关系式,理论上可以根据图像灰度、灰度梯度、太阳方向向量算得地形高程。【关键词】河床地形测量;数字图像测量技术;径向畸变矫正;投影变换;灰度信息变换;1介绍河床地形测量是一个在河工模型试验中最复杂的任务。传统的地形测量工具,如电子水平仪,电子中转仪,以及全站仪,很难在河床地形测量之中应用。目前,电阻式测距仪是通常使用的装置。它具有良好的适应性,可以测量多种地形。它适用于不同的含沙量和沙质条件。但是,它的低测量的效率和河床干扰问题是它的主要缺点。为了满足动态测量的需求,各种各样的地形测量方法已经进化。地面激光扫描,空中光探测和测距(LIDAR),多波束声纳,实时动态(RTK),全球定位系统,和全站仪测量不断被开发以满足增加地貌科学研究的兴趣和工程应用。然而,这样的方法更适合于大规模河床模型,甚至是实际的河流。此外,还有很多软件及硬件资源。在最近几年,随着允许的精确校准方法的发展,非量测相机变得越来2越可靠,摄影的自动化变得可访问到广泛的用户群。使用在线结构从运动(SFM)计划等。2013年Bouratsis等。利用自由和开源软件的优势从照片制作中创建的河流环境模型的高分辨率数字高程;2013有人使用的一对商业摄像机来记录河床的演化,并且由一组计算机视觉的一个计算方法和图像处理算法被用来分析视频和重建的瞬时3D床的表面上。詹姆斯和罗布森(2012)集成SFM和多视点立体(MVS)算法研究在方法测量地形需要很少的专业知识和实现自动化处理。阿斯特吕克等在2012年研究了立体技术测量沙床抬高斜在区波时间尺度。此方法是非侵入性,所以有很高的精度,时间分辨率也很容易让人抓获。此外,鲁等人在2008年提出了一些有关平原和高原地形的专题制图相关的研究图象数据是简单地2D数据。然而,许多线索可能在单个图像或多个图像中找到,其中可以通过图像场景进行三维重建。最典型的重建方法包括从校正方法的形状(Zhang等,1999年),从质地法的形状(福赛思和庞塞,2002),手动交互方法(Shashua,1997)。也有根据一些方法在多个图像进行重建,例如立体视觉的方法,运动图像序列的方法,和光度立体法(李,1991;张Y.J.,2000;Pollefeys和GOOL,2002)。还值得一提的是,三维重建应用广泛的还有地形测量。还有在其他领域的一些显著的应用。Gómez等人,(2013年)进行了新的方法用于重建,从多个3D+T彩色多普勒3D+T速度场图像。Mikes等,(2013年)集中在扫描光束偏折表面重建,并提出和分析的新的数学方法从而解决了三维表面形状重建问题。柳(2013)提出了一种新的深度提取方法技术与计算积分成像小透镜阵列。此外,图像分析技术也已用于从CCD空间和时间上检索水面仰角(Benetazzo,2006;Gallego等,2011)。在一定程度上,这些技术是类似于地形测量。他们用重叠的视频图像恢复地形信息。2摄像机失真校正图像的非线性失真校正是图像测量及三维重建必不可少的步骤。它是CCD照相机的几何模型用于确定三维几何的关系对象表面的信息和相应的图像匹配点。由于光学透镜的结构和理想的线性与小孔成像模型之间的不同,从CCD拍摄的图像会产生非线性几何失真。这严重影响了3D信息的准确性通过2D图像获得3的。2.1数学模型在设计和制造透镜的过程中不可避免地产生在图像畸变。径向变形,偏心变形和薄:一般效果可以通过数学模型来表示棱镜失真。镜头畸变通常可表示为:其中,dx和dy是原始失真图像坐标,ux和uy是理想的失真图像坐标。dx和dy是在x和y方向上的失真,分别描述为:其中第一项是径向失真,所述第二术语是偏心失真,而第三项是薄棱镜变形;K1,K2,P1,P2,S1和S2为非线性失真参数(翁等人,1992;Ahmed和法拉格,2005;Wang等人,2008)。以前的研究(张Z.Y.,2000;江等人,2001;个人和Kovacic,2002;Miks和诺瓦克,2012)指出,透镜径向失真是多比其他像差更加严重。切向失真和畸变棱镜不必考虑。太多的非线性参数不会提高解的精度,而是将导致其不稳定。即最常用的描述径向失真多项式模型(PM)可以被写入为:其中,dr和ur是从各距离扭曲的点(dx,dy)和失真点(ux,uy),以扭曲的中心P;ik(ⅰ=1,2,...)是径向失真参数。Devernay和Faugeras(1995)表明所述第一阶径向对称畸变参数,K1,可以实现一定的准确性。为了实现更高的精度,我们使用了一阶和二阶畸变参数,k1和k2,测量失真的图像失真程度。由于图像中心是失真(Tordoff和Murray,2000)中心的一个很好的近似,4我们随便拿图像作为失真中心P的中心(cx,cy)。图像校正公式坐标表示为:然后,改写后的未失真坐标和扭曲的坐标由下式给出:2.2校准过程为了找到畸变参数,我们使用Devernay和Faugeras(1995年)的直线法和一些新的改进。这种方法使用基本属性(Devernay和Faugeras,2001年)是在空间中的每个直线上的投影是一条直线。如果我们可以发现径向失真图像上的变换,这样在空间中的每个直线被认为是转换后的图像中的直线,那么我们就可以估计的图像的畸变的参数。通过使用此属性,采用一个反复的过程来估计失真参数k1和k2。2.2.1边缘检测图像边缘具有两个属性:方向和大小。边缘像素沿着边缘方向平缓变化;然而在垂直于边缘的方向存在一个巨大的变化。首先,用一个新的算术Canny边缘检测器(穆罕默德等人,2013)被用来获得的幅度和边缘的方向,然后将数据由高斯低通滤波器进行处理。其次,非极大值抑制和滞后阈值被用于的精确位置具有子像素精度的优势。这种方法可以提高检测的边缘的分辨率,保护低强度边缘,增强抗干扰能力。52.2.2提取物扭曲线段边缘检测之后,我们需要提取扭曲线段,这是在三维空间中最有可能的直线。因为某些部分可以被打破边缘检测,当两端之间的距离小于一个0.5像素时,我们加入碎段。我们也可以把最低门槛上段长度定为2个像素,理由是较短的片段可以包含比关于失真的有用信息更多的噪音。2.2.3测量失真错误为了得到失真参数,计算测量一个扭曲线段的曲率,通过它多少扭曲来分割我们使用的扭曲线段,通过最小二乘逼近以形成一条直线。在一般情况下,直线的方程式接合端点(1x,2y)和(2x,2y),表示为:为一个线段的任何点(x,y)的,我们使用作为距离,从点到直线,然后畸变误差是所有的距离的平方的总和。其结果是,该畸变误差为零,当失真段是一个直线。扭曲段的曲率越大,畸变误差将是较大的。2.2.4优化方法我们结合黄金分割搜索方法GSSM)和二次插值法(QIM)(龚和王,2009年)来计算最佳失真参数。QIM是准确的,但不非常有效的。所以,我们首先得到一个小的GSSM值范围,然后使用QIM获取,满足我们的精度要求。整个优化过程是:首先,我们使用该范围的金色部分作为初始点,然后执行由GSSM迭代,直到有一点,从获得的函数f(x)值的差相邻的两步骤迭代。然后一个由迭代QIM完成。如果没有太大的区别,那么从两种方法求出的f(x)的值,另一迭代由QIM完成。再次,如果没有求出的f(x)的值相差无几从由QIM相邻两步骤迭代,并且自变量之间的差别非常小,迭代继续进行,直至精度要求得到满足。否则,我们改为GSSM。我们设定精度为10101。由于参数数据减少,并且包含许多异常值,有一个从所述最优参数进一步移6动的危险。因为这个原因,我们在K1第一只优化,直到它给出了一个稳定的解决方案。然后,K2加入,并最终全面优化失真参数下进行。2.3标定实验结果要验证校准效果,我们进行两个图像校准实验。该原始图像坐标是不可或缺的。然而,校准后,图像的坐标非整数,且需要估计的整数坐标的新的灰度值。考虑这个问题,我们使用的三次样条插值法灰度级内插。图像边缘轮廓如图1所示,该两个图像都产生桶形失真。通过Devernay和Faugeras实验结果(1995)的方法示于图2,计算时间是65.6秒和32.9秒,失真参数是K1=7109415.7和K1=7106914.8,残余误差分别为24和1.8。该通过该方法实验结果如图3,计算时间是55.3秒和30.2秒,失真参数K1=6.9464×10-7,K2=4.6261×10-12和K1=7.9267×10-7,K2=6.2357×10-13,残余误差分别为1和0.8。结果看起来很合理,表明Devernay,Faugeras(1995年)提出的方法是有效的。我们也提高了精度和失真参数的计算效率,因此,我们可以使用校准图像信息做一个更精确的图像调查。7图1两个用于校正失真图像图(a)从我们的CCD照相机;(二)从(五月,2013访问)图2通过Devernay和Faugeras(1995年)的原始方法使用参数校准来计算图像(a):经校准图1(a)中的结果;(b):校准图1(b)中的结果。图3通过该方法使用参数校准来计算图像8(a):经校准图1(a)中的结果;(b):校准图(b)中结果。32D图像间的映射转换和三维空间坐标3.1透视变换考虑到校准的图像可以看作地面中央突起,则存在图像与地面之间的透视投影变换的关系。在摄影测量中,常用的数学模型包括直接线性变换(DLT)(Chen等,1994)和空间后方交会的方法(王,2007)。空间后方交会的方法需要较少的控制点,但它具有较高的要求,在实际迭代过程的初始值要有较高的准确度。所以我们使用DLT来计算转换参数。DLT是一个直接描述关系角度图像和地面之间的解析表达式。它包含11个未知参数(L1-L11),并能提高图像的线性错误。让(U,V)是图像坐标,(X,Y,Z)是相应的三维空间坐标,然后直接线性关系可以表示为:当给定的n(n≥6)控制点,我们通常通过最小二乘法来计算这些11个参数。传统的方法是:当9残留方格的最小总和是在传统方法的目标函数。然而,坐标图像之间的统计属性和相应的三维空间中的坐标被致命地忽略。该溶液的精度不足够大,而且它只能用于低精度摄影。在这项研究中,我们使用一个近似最大似然估计法(AMLE),并考虑残差的一阶误差传播(周和邓,2011年)来计算转换参数。另外,更简单的迭代算法被应用。3.2变换参数解决方案基于角法由于每个点带来了两个方程,用i来代表点数,让:那么我们的控制方程:是观测值。假定观测是彼此独立的,和是观测协方差矩阵。根据误差传播法,A1的方差,i可以表示为:10其中,带S是由相机拍摄规模确定的等效误差的因素。因为在摄影的空间坐标误差以毫米和图像测量坐标通常表示是像素,所需要的像素错误转化为毫米。这是一个半线性错误-在变量(EIV)模型参数估计问题(Muhlich和Meste,2001年)。在传统的问题可以表示为忽略剩余的权重,即,是单位矩阵,该AMLE问题是一个普遍的最小二乘问题,并要确定的估计的参
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码








 someking
someking
本文标题:测绘工程专业英语翻译(英文版)
链接地址:https://www.777doc.com/doc-2229024 .html