您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 机器人,设计,论文,平衡
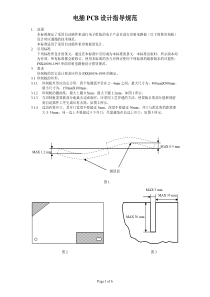
分类号密级UDC编号本科毕业论文(设计)题目单轴双轮自平衡机器人的设计与制作系别专业名称电子信息科学与技术年级学生姓名学号指导教师二〇一六年四月目录1.绪论......................................................................................................................错误!未定义书签。1.1引言...........................................................................................................错误!未定义书签。1.2本文研究的内容.......................................................................................错误!未定义书签。2.理论分析................................................................................................................错误!未定义书签。2.1自平衡小车的物理建模...........................................................................错误!未定义书签。2.2PID控制技术............................................................................................错误!未定义书签。2.3简易对称互补滤波技术...........................................................................错误!未定义书签。3.系统设计................................................................................................................错误!未定义书签。3.1硬件设计方案论证...................................................................................错误!未定义书签。3.2软件设计方案论证...................................................................................错误!未定义书签。4.综合调试.............................................................................................................错误!未定义书签。5.总结......................................................................................................................错误!未定义书签。参考文献...................................................................................................................错误!未定义书签。附录部分程序代码.................................................................................................错误!未定义书签。摘要:单轴双轮自平衡机器人是一个极不稳定的系统,常用来检验控制算法的有效性。本文主要综述了单轴双轮自平衡系统的研究现状,以及单轴双轮自平衡系统的研究价值。然后通过物理建模得到了单轴双轮自平衡系统的运动学特性,并结合传感器技术和自动控制理论提出了一个单轴双轮自平衡小车的设计方案。采用了陀螺仪和加速度传感器分别对车体倾角进行检测,利用对称互补滤波算法对检测到的数据进行融合得到精确的车体倾角,再引入PID技术对车体姿态进行精确控制。最后对论文所做的工作进行了总结,对未来的研究和发展做出了展望。关键词:自平衡电机驱动PID技术陀螺仪简易对称互补滤波器Abstract:Theuniaxialtwo-wheeledself-balancingrobotisaveryunstablesystem,sooftenusedtotesttheeffectivenessofthecontrolalgorithm.Inrecentyearsmanyexpertsfromhomeandabroadhavehadadeepresearchonthetheoryofuniaxialtwo-wheeledself-balancing,andthetheorywasgreatlypromoted.Thenthroughthephysicalmodelingthekinematiccharacteristicswasfound,andCombinedwithsensortechnologyandautomaticcontroltheoryadesignwasPresented.Thegyroscopeandaccelerometersensorsarerespectivelyonrobotinclinationdetection,complementarysymmetryfilteringalgorithmwasusedtodealwithdataandgettheprecisebodyinclination,ThenintroducePIDtechnologyonvehicleattitudecontrol.Finallythepapermakesaconclusion,implicationsforfutureresearchanddevelopmentprospects.Keywords:self-balancemotor-drivesPIDtechnologygyroscopesimplecomplementaryfiltering1.绪论1.1引言近年来,随着人工智能理论和传感器技术的发展,机器人理论得到了很大的发展。做为移动机器人中的一个重要分支,单轴双轮自平衡系统也引起了国内外的科研机构和企业以及一些机器人DIY爱好者的关注。它是一个绝对不稳定系统,必须施加强有力的控制手段才能保重其平衡,所以它可以用于检验控制算法的有效性。由于引入了人工智能技术和传感器技术所以可以完成复杂环境下的复杂任务,只需要在硬件上做很少的改动就可以增加载人功能,成为单轴双轮自平衡代步车。2002年瑞士联邦技术学院工业电子实验室的研究人员研制的名为JOE的基于倒立摆的小型自平衡两轮车模型,是由DSP芯片进行控制的。它由车架上方所附的重物模拟实际车中的驾驶者。研究人员通过陀螺仪和光电编码器测量的数据,用线性状态反馈控制器控制整个系统的平衡稳定[1]。同年,美国kgo公司的SteveHassenplug设计了两轮自平衡传感式机器人Lcgway。这个设计引入了电机的差动驱动方式,它可以工作在倾斜面甚至不规则表面上,可遥控操作。通过对电动机进行遥控,Legway可以在前行,后退和转弯时保持平衡,可以实现零半径转弯和U型回转。同年三洋电机展示了可依靠上体倒立来保持平衡的双轮行走机器人“FLATHRU”,大小为602×463×564mm,重20Kg。移动速度方面,平地行走时最大30cm/s,可搬运重量最大为10Kg,运行时间约为1小时。车轮中嵌有一个输出功率为90W的直流电动机,头部则嵌入了两个相同的电动机。为了检测上体的平衡情况,使用了3个陀螺仪和1个3轴加速度传感器。同年,美国Segway公司开发了世界上第一部能够自平衡的两轮电动车,时速高达20Km/h。该电动车把人们从传统的“三点平衡”和以低重心、大而稳的底盘设计来避免倾斜的束缚中解脱出来。通过检测车体的角度和角速度,用适当的回复转矩来避免倾斜摔倒。Segway使用的是航空级陀螺仪、一组倾斜传感器、一套复杂的“直觉软件”、一个加速度计、十个微处理器、两个镍氢电池组、一台电动机和每秒检测一百多次驾驶者重心的传感器。2007年,日本早稻田大学的RyoWatanabe在Legway的启发下设计制作了NXTway,美国麻省理工学院的几名学生设计制作出了一台自平衡小车,中心处理器采用PIC单片机[2]。以上是国内外两轮自平衡机器人和自平衡代步车的研究现状。这些机器人和代步车对本课题的研究提供了很好的指导作用。为下面的研究工作提供了很好的参考。1.2本文研究的主要内容本文研究主要的内容包括:1)双轮自平衡机器人的物理建模;2)对几种常用的直流有刷电机驱动电路进行分析对比,选取一款合适的电机驱动电路;3)对几种常用的测量电机转速的方法进行分析和对比,选取一种合理的测量电机转速的方案;4)仔细研究系统中使用的多个不同电压值的电源,对常用的稳压电路进行分析和对比,选取一种合适的电源方案;5)研究PID算法的基本原理,并将PID算法应用在直流有刷电机的控制中;6)对几种常用的陀螺仪和加速度计等惯性元件的性能进行分析对比,并深入研究互补对称滤波数据融合技术,选出合适的陀螺仪和加速度计;7)采用AltiumDesigner软件绘制电路原理图和PCB板,搭建STM32最小硬件系统,利用RVMDKV4.2编译调试软件,以及STM32固件库完成STM32的软件开发;8)仔细研究系统中各个模块之间的通信协议以及实现方法,选取合适的通信方案。2.理论分析2.1自平衡小车的物理建模图2-1单轴双轮自平衡机器人的受力示意图机器人受力分解图如图2-1所示。其中规定质心为O,水平方向为x垂直方向为y,机器人支架中心轴线规定为轴m,与其垂直方向的轴线规定为n,为机器人的偏角。机器人本质不稳定,车体倾斜的原因源于重力在水平方向的分量。为了保持平衡,机器人x方向的驱动力f必须等于或大于重力沿着水平方向x轴的分力Hf。当机器人实现动态平衡时,水平方向的推力)()(tftfHF[3]。由图2-1得,重力沿着水平方向的分量为:()()tanHftMmg(2-1)电机产生的水平方向的驱动力)(tf为:()()gKfttR(2-2)其中,R为车轮半径,gK减速比,)(t电机扭矩。如果已知电机的最大扭矩,可求得单轴双轮自平衡机器人达到动态平衡时的倾角为:gmMtf)()(arctan(2-3)MgxymnOgsingHf将电机的最大扭矩max代入式2-2,可以得到最大驱动力maxf,再将maxf代入式2-3可得到单轴双轮自平衡机器人的最大可控角度max。上面的计算是在系统没有动能损失的情况下,即小车在调整平衡过程中没有运动,如果考虑这些因素,系统的控制范围要小一些,因此可以最终确定系统的控制范围为:maxmax5454(2-4)以上的物理建模完成了对单轴双轮自平衡机器人的受力分析和最大可控角度推导,旨在为PID控制提供理论指导。2.2PID控制技术PID是比例(Proportion)、积分(Integration)、微分(Differentiation)的英文缩写。PID控制技术是工程应用中最为广泛的调节器控制规律,简称PID控制或PID调节。PID控制器问世至今已有近70年历史,其结构简单、稳定性好、工作可靠、调整方便,因而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 gaoyue0911
gaoyue0911
本文标题:机器人,设计,论文,平衡
链接地址:https://www.777doc.com/doc-2324826 .html