您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > matlab凸轮轮廓设计及仿真说明书要点
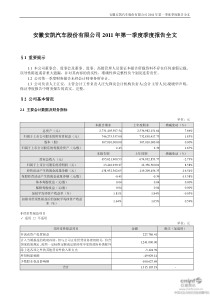
偏置盘型凸轮创新课程设计课程名称:机械原理设计题目:偏置盘型凸轮设计院系:机电学院班级:09机41设计者:彭辉学号:09294040指导教师:王卫辰学校:江苏师范大学1前言凸轮轮廓曲线的设计,一般可分为图解法和解析法.利用图解法能比较方便地绘制出各种平面凸轮的轮廓曲线.但这种方法仅适用于比较简单的结构,用它对复杂结构进行设计则比较困难,而且利用图解法进行结构设计,作图误差较大,对一些精度要求高的结构不能满足设计要求.解析法可以根据设计要求,通过推导机构中各部分之间的几何关系,建立相应的方程,精确地计算出轮廓线上各点的坐标,然后把凸轮的轮廓曲线精确地绘制出来.但是,当从动件运动规律比较复杂时,利用解析法获得凸轮的轮廓曲线的工作量比较大.而MATLAB软件提供了强大的矩阵处理和绘图功能,具有核心函数和工具箱.其编程代码接近数学推导公式,简洁直观,操作简易,人机交互性能好,且可以方便迅速地用三维图形、图像、声音、动画等表达计算结果、拓展思路口。因此,基于MATLAB软件进行凸轮机构的解析法设计,可以解决设计工作量大的问题。本此课程设计基于MATLAB软件进行凸轮轮廓曲线的解析法设计,并对的运动规律凸轮进行仿真,其具体方法为首先精确地计算出轮廓线上各点的坐标,然后运用MATLAB绘制比较精确的凸轮轮廓曲线和推杆的位移、速度及加速度曲线以及仿真。2目录前言1第一章:工作意义31.1本次课程设计意义31.2已知条件4第二章:工作设计过程52.1:设计思路52.2:滚子从动件各个阶段相关方程62.3:盘型凸轮理论与实际轮廓方程7第三章:工作程序过程73.1:滚子从动件各各阶段MATLAB程序编制83.2:凸轮的理论实际运动仿真程序编制12第四章:运行结果174.1:滚子运动的位移图174.2:滚子运动的速度图174.3:滚子运动的加速度图,局部加速度图184.4:滚子运动的仿真图194.5:滚子运动的理论与实际轮廓图20第五章:设计总结215.1:总结21第六章:参考文献2236.1:参考文献22第一章:工作意义1.1本次课程设计意义凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。与凸轮轮廓接触,并传递动力和实现预定的运动规律的构件,一般做往复直线运动或摆动,称为从动件。凸轮机构在应用中的基本特点在于能使从动件获得较复杂的运动规律。因为从动件的运动规律取决于凸轮轮廓曲线,所以在应用时,只要根据从动件的运动规律来设计凸轮的轮廓曲线就可以了。由凸轮的回转运动或往复运动推动从动件作规定往复移动或摆动的机构。凸轮具有曲线轮廓或凹槽,有盘形凸轮、圆柱凸轮和移动凸轮等,其中圆柱凸轮的凹槽曲线是空间曲线,因而属于空间凸轮。从动件与凸轮作点接触或线接触,有滚子从动件、平底从动件和尖端从动件等。尖端从动件能与任意复杂的凸轮轮廓保持接触,可实现任意运动,但尖端容易磨损,适用于传力较小的低速机构中。在带滚子的直动从动件盘形凸轮机构中,凸轮回转一周从动件依次作升-停-降-停4个动作。从动件位移s(或行程高度h)与凸轮转角Φ(或时间t)的关系称为位移曲线。从动件的4行程h有推程和回程。凸轮轮廓曲线决定于位移曲线的形状。在某些机械中,位移曲线由工艺过程决定,但一般情况下只有行程和对应的凸轮转角根据工作需要决定,而曲线的形状则由设计者选定,可以有多种运动规律。传统的凸轮运动规律有等速、等加速-等减速、余弦加速度和正弦加速度等。等速运动规律因有速度突变,会产生强烈的刚性冲击,只适用于低速。等加速-等减速和余弦加速度也有加速度突变,会引起柔性冲击,只适用于中、低速。正弦加速度运动规律的加速度曲线是连续的,没有任何冲击,可用于高速。曲线是凸轮机构设计的关键,常用的设计方法有解析法和图解法。在本次课程设计对偏心盘型凸轮进行设计,一方面是为对以前机械原理内容进行加深印象,另一方面是为提高CAE/CAM/CAD计算机辅助设计,为下学期的毕业设计做好前期准备,以及提高自我能力。提高编程能力,理解产品设计相关准备,为以后工作打下及基础。运用计算机进行凸轮设计解析法设计,从而获得设计凸轮实际以及理论轮廓曲线轨迹。1.2已知条件5偏心距e=15,基圆半径=40,滚子半径=10,推程运动角Ф=,远休止角Ф=,回程运动角Ф'=,近休止角Ф’=,从动件推杆滚子在推程以等加速等减速运动规律上升,升程规律=60,回程以简谐运动规律返回原处,凸轮逆时针回转,推杆偏于凸轮回转中心的右侧。(s为滚子推杆从动件移动的规律)升程许用压力角,回程需用压力角。第二章:工作设计过程2.1设计思路根据机械原理书上用解析法设计凸轮轮廓线的实质是建立凸轮轮廓线的数学方程式。已知偏距e,基圆半径r,从动件的运动规律s=s(δ),则理论凸轮轮廓曲线方程:,。()而实际凸轮的曲线方程:以此作为程序编制基础算法,然后明确程序编制需要哪些变量,利用MATLAB中相关函数进行计算,求出需要设计的理论,实际凸轮的轮廓曲线,并且利用PLOT函数进行画图,把从动件加速度,速度,位移进行画出来,并生成一个小型6的动画,进行凸轮与滚子推杆从动件之间运动规律的仿真设计。2.2:滚子从动件各个阶段相关方程推程等加速段:20,即50x0根据:,,:2x2503s,x1253v,1253a。推程等减速:2,即100x50根据:22h2hs,h4v,2h4a2x100250360s,2h4v,1253a当处于远休止:s,即160x100S=h,v=0,a=0即:s=60,v=0,a=0回程简谐远动:'ss,即250x160s'cos12hs,s''sin2hv,s;2'22cos2ha7则:80x21cos3030s,80x21sin15v80x21cos5.7a处于近休止:2s's,即360x2500a,0v,0s2.3:盘型凸轮理论与实际轮廓方程盘型凸轮理论方程:,()盘型凸轮实际方程:第三章:工作程序过程3.1:滚子从动件各各阶段MATLAB程序编制求从动件位移,加速度,速度曲线,这里根据前面所列函数,我定义矩阵步长为pi,r0为基圆半径,rr为滚子半径,8h为升程,e为偏心距,delta01为推程运动角,delta02为远休止角,delta03为回程运动角,hd为角度转换弧度制,du为弧度制转换为角度制,n=360,并定义5个计数向量,分别是tan1,tan2,tan3,tan4,tan4,tan5,分别属于前面讨论5情况matlab程序:clear;r0=40;rr=10;h=60;e=15;delta01=100;delta02=60;delta03=90;hd=pi/180;du=180/pi;se=sqrt(r0*r0-e*e);n1=delta01+delta02;n3=delta01+delta02+delta03;n=360;tan1=0:pi/200:delta01/2;s1=2*h*tan1.^2/delta01^2;9v1=4*h*tan1*hd/(delta01*hd)^2;a1=3/125;tan2=delta01/2:pi/200:delta01;s2=h-2*h*(delta01-tan2).^2/delta01^2;v2=4*h*(delta01-tan2)*hd/(delta01*hd)^2;a2=-3/125;tan3=delta01:pi/200:n1;s3=h;v3=0;a3=0;tan4=n1:pi/200:n3;k=tan4-n1;s4=0.5*h*(1+cos(pi*k/delta03));v4=-0.5*pi*h*sin(pi*k/delta03)/(delta03*hd)^2;a4=0.5*pi*pi*h*cos(pi*k/delta03)/(delta03*hd)^2;tan5=n3:pi/200:n;s5=0;v5=0;a5=0;figure(1);holdon;gridon;title('偏置盘形凸轮从动件位移');10xlabel('x/mm');ylabel('y/mm');plot([-(r0+h-40)(r0+h)],[00],'k');plot([0,0],[-(r0+h)(r0+rr)],'k');plot(tan1,s1,'r',tan2,s2,'r',tan3,s3,'r',tan4,s4,'r',tan5,s5,'r');figure(2);title('偏置盘形凸轮从动件速度');holdon;gridon;xlabel('x/mm');ylabel('y/mm');plot([-(r0+h-40)(r0+h)],[00],'k');plot([0,0],[-(r0+h)(r0+rr)],'k');plot(tan1,v1,'r',tan2,v2,'r',tan3,v3,'r',tan4,v4,'r',tan5,v5,'r');figure(3);title('偏置盘形凸轮从动件加速度');holdon;gridon;xlabel('x/mm');ylabel('y/mm');plot(tan1,a1,'r',tan2,a2,'r',tan3,a3,'r',tan4,a4,'r',tan5,a5,'r');11figure(4);title('偏置盘形凸轮从动件局部加速度');holdon;gridon;xlabel('x/mm');ylabel('y/mm');plot(tan1,a1,'r',tan2,a2,'r',tan3,a3,'r',tan5,a5,'r');在这里figure(1)代表从动件位移曲线,figure(2)代表从动件速度曲线,figure(3)代表从动件全部加速度曲线,Figure(4)代表从动件局部加速度,因为在第四段曲线跳跃太大所以多一个图进行观察。3.2:凸轮的理论实际运动仿真程序编制因为所需要变量跟前面曲线程序一样所以这里就不重复,基本算法流程图:12matlab程序:clear;r0=40;rr=10;h=60;e=15;delta01=100;delta02=60;delta03=90;hd=pi/180;du=180/pi;se=sqrt(r0*r0-e*e);n1=delta01+delta02;n3=delta01+delta02+delta03;n=360;fori=1:nifi=delta01/2s(i)=2*h*i^2/delta01^2;ds(i)=4*h*i*hd/(delta01*hd)^2;ds=ds(i);程序流程图一13elseifidelta01/2&i=delta01s(i)=h-2*h*(delta01-i)^2/delta01^2;ds(i)=4*h*(delta01-i)*hd/(delta01*hd)^2;ds=ds(i);elseifidelta01&i=n1s(i)=h;ds=0;elseifin1&i=n3k=i-n1;s(i)=0.5*h*(1+cos(pi*k/delta03));ds(i)=-0.5*pi*h*sin(pi*k/delta03)/(delta03*hd)^2;ds=ds(i);elseifin3&i=ns(i)=0;;ds=0;endxx(i)=(se+s(i))*sin(i*hd)+e*cos(i*hd);yy(i)=(se+s(i))*cos(i*hd)-e*sin(i*hd);dx(i)=(ds-e)*sin(i*hd)+(se+s(i))*cos(i*hd);dy(i)=(ds-e)*cos(i*hd)-(se+s(i))*sin(i*hd);xp(i)=xx(i)+rr*dy(i)/s
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


![[机械资料]机械英语名词解释](/doc-116658.png)
 lonely2548
lonely2548
本文标题:matlab凸轮轮廓设计及仿真说明书要点
链接地址:https://www.777doc.com/doc-2399762 .html