您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 电气安装工程 > 基于labVIEW的双轮自平衡小车
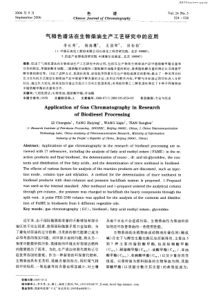
双轮自平衡小车摘要:本系统主要包括控制系统模块、电机驱动模块和角速度测量模块三个模块,根据角加速度传感器测量出的数据,利用myRIO调节占空比,调节电机的转速,使小车能始终保持平衡。关键词:PID控制,PWM,自平衡;目录1方案分析........................................................11.1模块方案比较与选择................................................11.2总体方案论述......................................................12电路与硬件设计.........................................................................................................22.1.驱动的选择.........................................................................................................................22.2电路设计.............................................................................................错误!未定义书签。3系统软件设计............................................................................................................43.1控制算法的选取....................................................43.2程序流程图...........................................................73.3程序清单............................................................104系统测试及结果分析.............................................13总结.............................................................15参考文献.........................................................15附录实物图表....................................................16一、1一、方案分析1.1.模块方案比较与选择1.1.1控制系统模块的论证与选择方案一:采用传统的89C51芯片为控制核心。具有4KB的程序存储器,128KB的数据存储器,64KB的片外存储器寻址能力,64KB的片外数据存储器寻址能力,32根输入/输出线,1个全双工异步串行口,2个16位定时/计数器,5个中断源,2个优先级。但数学处理能力差,功能单一,运算速度慢,控制过程比较烦琐。方案二:采用采用NImyRIO。NImyRIO内嵌XilinxZynq芯片,使学生可以利用双核ARMCortex-A9的实时性能以及强大的计算功能,编程开发简单,支持用LabVIEW进行编程,图形编程,明了易懂,同时包含大量现成算法函数,方便快速调用。同时,myRIO自带三轴加速度传感器,可通过LabVIEW观察波形,进行自平衡小车测量时非常方便。综合考虑采用方案二控制。1.1.2电机驱动模块的论证与选择方案一:采用步进电机为驱动源,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。且速度不是很快,不好操作。方案二:使用MOSFET构成H桥式驱动电路,利用PWM波形来控制电机的转速,此电路驱动功率比较大耗能高,电机的转速较快。方案三:使用直流电机驱动芯片L298N来驱动直流电机,通过占空比来调节转速,控制较为方便。综合考虑采用方案三。1.1.3角速度测量模块的论证与选择方案一:使用三轴加速度传感器MMA7260Q可以测量小车加速度大小,选取最佳重心位置,将测量出的数据传入控制系统。方案二:使用myRIO自带三轴加速度传感器,由于是本身自带,便于使用与测量。1.2.总体方案论述本系统主要包括控制系统模块、电机驱动模块和角速度测量模块三个模块,根据角加速度传感器测量出的数据,利用myRIO调节占空比,调节电机的转速,使小车能始终保持平衡。.NImyRIO角加速度传感器显示电机2二、电路与硬件设计2.1.驱动的选择本电路选择TB6612FNG新型驱动器件,与传统电动机驱动相比,具有较高的集成度,且能独立双向控制2个直流电机,同时能提供足够的输出能力,运行性能和能耗方面也具有优势,因此在集成化、小型化的电机控制系统中,它可以作为理想的电机驱动器件。它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机,TB6612FNG每通道输出最高1.2A的连续驱动电流,启动峰值电流达2A/3.2A(连续脉冲/单脉冲);4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100kHz;待机状态;片内低压检测电路与热停机保护电路;工作温度:-20~85℃;SSOP24小型贴片封装。AINl/AIN2、BIN1/BIN2、PWMA/PWMB为控制信号输入端;AO1/A02、B01/B02为2路电机控制输出端;STBY为正常工作/待机状态控制引脚;VM(4.5~15V)和VCC(2.7~5.5V)分别为电机驱动电压输入和逻辑电平输入端。2.2.电路设计TB6612FNG与AVR单片机组成的电机控制单元。单片机定时器产生4路PWM输出作为AIN1/AIN2和BIN1/BIN2控制信号,对电机M1和M2的控制。使用功率MOSFET对VM和VCC提供电源反接保护。我们可以直接将PWM的AB端口都接在MyRio的PWM输出端口相连,使小车的两个电机转速均由同一个量进行控制,小车的转动能同步。两且个电机的转动3方向控制也由MyRio输出进行控制,同步进行方向的转换,使小车在偏移后达到平衡。AIN11AIN22PWMA0STBY3BIN14BIN25PWMB6GND7VM9VCC10GND12AO113AO214BO115BO216GND17TB6612fngVCCMyRio电源输入电路:通过外接开关开关和插口,设计电路,将MyRio由电源供电改为电池供电,并可以实时的将控制器件进行开关。P指数的输入和电机开关控制电路:外接轴转式电位器,通过电阻分压后接入MyRio模拟端口,来控制P指数的变化,并且外接开关通过输入的0、1,改变程序来控制电机的转和停,达到实时控制,利于调制程序。4三、系统软件设计3.1控制算法的选取本系统的控制算法选用PID算法3.1.1PID概述PID调节器是指按偏差的比例、积分和微分进行控制的调节器,其调节实质是根据输入的偏差值,按比例、积分、微分的函数关系进行运算,其运算结果用于输出控制。在实际应用中,在多数情况下,根据具体情况,可以灵活地改变PID的结构,取其一部分进行控制(杨德刚等,2010)。PID控制器的输入输出关系为:dttdeKdtteKteKtuDtIP)()()()(0(15)PID控制有模拟和数字控制方式:模拟方式采用电子电路调节器,在调节器中,将被测信号与给定值比较,然后把比较出的差值经PID电路运算后送到执行机构,改变给进量,达到调节之目的。数字方式用计算机进行PID运算,将计算结果转换成模拟量,输出去控制执行机构。本设计选用数字PID控制方式。比例控制对系统动态性能的影响:pK增大时,将使系统响应速度加快,pK偏大时,系统振荡次数增多,调节时间加长;pK偏小时,系统响应速度缓慢。pK选择以输出响应产生4:1衰减过程为宜。在系统稳定的前提下,加大Kp可以减少稳态误差,但不能消除稳态误差。积分时间iT对系统性能的影响:积分控制通常影响系统的稳定性。iT太小使,系统不稳定,且震荡次数较多;iT太大时,对系统的影响将削弱;iT合适时,系统的过度过程特性比较理性。积分控制有助于消除系统稳态误差。微分时间DT对系统性能的影响:微分作用的增强可以改善系统动态特性,如减少超调量,缩短调节时间等,适当加大比例控制,可以减少稳态误差,提高控制精度;另一方面微分作用会放大系统噪声,降低系统抗干扰能力。微分环节的加入可以在误差出现或变化瞬间,按偏差的变化的趋势进行控制。引进一个早期的修正作用,有助于提高系统稳定性。3.1.2数字PID算法数字PID算法为用计算机实现,用数值逼近和连续信号离散化实现的PID控制规律。有两种实现方式:位置性数字PID、增量型数字PID。3.1.2.1位置式PID控制算式在采样时刻t=kθ(θ为采样周期)时,式(4—1)表示的PID控制规律可以通过以下数值公式近似计算:5比例作用:)()(keKkuCP(4-2)积分作用:kiICIieTKku0)()((4-3)微分作用:)]1()([)(kekeTKkuDCD(4-4)式(4—2)、式(4—3)、式(4—4)表示的控制算法提供了执行机构的位置u(k),所以称为位置式PID控制算法,实际的位置PID控制器输出为比例作用、积分作用与微分作用之和,即)]}1()([)()({)()()()(0kekeTieTkeKkukukukuDkiICDIP(4-5)如果采样周期θ取得足够小,这种逼近可相当准确,被控过程与连续控制过程十分接近。这种算法的缺点是,由于全量输出,所以每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大。而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化,会引起执行机构位置的大幅度变化,这种情况往往是生产实践中不允许的。因而产生了增量式PID控制算式。位置式PID控制算式的系统控制示意图如图(4-2)所示。3.1.2.2增量式PID控制算式增量式PID控制算式是指数字控制器的输出只是控制器的增量Δu(k)。当执行机构需要的是控制量的增量时,可由式(4-5)导出提供增量的PID控制算式。根据递推原理可得:610)]}2()1([)()1({)1(kiDICkekeTieTkeKku(4-6)用式(4-5)减去式(4-6)可得:)]}2()1(2)([)()1()({)1()()(kekekeTkeTkekeKkukukuDIC(4-7)式(4-7)称为增量式PID控制算式。可以看出,由于一般计算机控制系统采用恒定的采样周期θ,一旦确定了KP、KI、KD,只要使用前后3次测量值的偏差,即可由式(4-7)求出控制增量。图(4-3)给出了增量式PID控制系统的示意图。就整个系统而言,位置式与增量式控制算法并无本质区别,增量式控制虽然只是算法上作了一点改进,却带来了不少优点:(1)(1)由于计算机输出增量,所以误动作时影响小,必要时可以用逻辑判断的方法去掉。(2)(2)手动/自动切换时冲击小,便于无扰动切换。此外,当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故能仍然保持原值。(3)(3)算式中不需要累加。控制增量Δu(k)的确定仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。但是增量式控制也有不足之处,积分截断效应大,有静态误差,溢出的影响大。因此,在选择时不可一概而论。由于对增量式PID使用上的不熟悉,以及本品采用myRIO自带的三轴加速度传感器,可以将一个位置上的重力加速度值通过数学计算
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 gxyiswd
gxyiswd
本文标题:基于labVIEW的双轮自平衡小车
链接地址:https://www.777doc.com/doc-2534224 .html