您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 基于霍尔传感器的直流电机转速测量系统设计
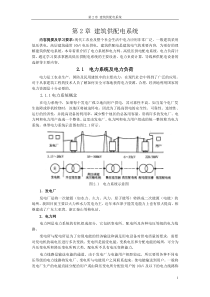
基于霍尔传感器的直流电机转速测量系统设计引言霍尔传感器在实际应用中越来越广泛,将永磁体按适当的方式固定在被测轴上,霍尔传感器置于磁铁的气隙中,当州转动时,霍尔传感器输出的电压则包含有转速的信息。将霍尔传感器输出电压经后续电路处理,便可得到转速的数据。基于以上特点,我们设计了感器的直流电机转速测量系统。利用霍尔效应测量转速的工作原理非常简单,可靠性高,性能稳定,率响应快、抗干扰能力强等优点。摘要霍尔传感器在实际应用中越来越广泛,将永磁体按适当的方式固定在被测轴上,霍尔传感器置于磁铁的气隙中,当州转动时,霍尔传感器输出的电压则包含有转速的信息。测速的方法决定了测速信号的硬件连接,测速实际上就是测频,因此,频率测量的一些原则同样适用于测速。将霍尔传感器输出电压经后续电路处理,便可得到转速的数据。随着单片机的不断推陈出新,特别是高性价比的单片机的涌现,转速测量控制普遍采用了以单片机为核心的数字化、智能化的系统。本文介绍了一种由单片机C8051F060作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。1转速测量及控制的基本原理1.1转速测量原理转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法)、T法(测周期法)和MPT法(频率周期法),该系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。脉冲信号的周期与电机的转速有以下关系:式中:n为电机转速;P为电机转一圈的脉冲数;T为输出方波信号周期根据式(1)即可计算出直流电机的转速。霍尔器件是由半导体材料制成的一种薄片,在垂直于平面方向上施加外磁场B,在沿平面方向两端加外电场,则使电子在磁场中运动,结果在器件的2个侧面之间产生霍尔电势。其大小和外磁场及电流大小成比例。霍尔开关传感器由于其体积小、无触点、动态特性好、使用寿命长等特点,故在测量转动物体旋转速度领域得到了广泛应用。在这里选用美国史普拉格公司(SPRAGUE)生产的3000系列霍尔开关传感器3013,它是一种硅单片集成电路,器件的内部含有稳压电路、霍尔电势发生器、放大器、史密特触发器和集电极开路输出电路,具有工作电压范围宽、可靠性高、外电路简单输出电平可与各种数字电路兼容等特点。1.2转速控制原理直流电机的转速与施加于电机两端的电压大小有关,可以采用C8051F060片内的D/A转换器DAC0的输出控制直流电机的电压从而控制电机的转速。在这里采用简单的比例调节器算法(简单的加一、减一法)。比例调节器的输出系统式为:式中:Y为调节器的输出;e(t)为调节器的输人,一般为偏差值;Kp为比例系数。从式(2)可以看出,调节器的输出Y与输入偏差值e(t)成正比。因此,只要偏差e(t)一出现就产生与之成比例的调节作用,具有调节及时的特点,这是一种最基本的调节规律。比例调节作用的大小除了与偏差e(t)有关外,主要取决于比例系数Kp,比例调节系数愈大,调节作用越强,动态特性也越大。反之,比例系数越小,调节作用越弱。对于大多数的惯性环节,Kp太大时将会引起自激振荡。比例调节的主要缺点是存在静差,对于扰动的惯性环节,Kp太大时将会引起自激振荡。对于扰动较大,惯性也比较大的系统,若采用单纯的比例调节器就难于兼顾动态和静态特性,需采用调节规律比较复杂的PI(比例积分调节器)或PID(比例、积分、微分调节器)算法。2系统的硬件软件设计2.1硬件设计本系统采用单片机C8051F060作为主控制器,使用霍尔传感器测量电机的转速,通过7079最终在LED上显示测试结果。此外,还可以根据需要调整控制电机的转速,硬件组成由图1所示。DIValign=center/DIV控制器C8051F060主要完成转速脉冲的采集、16为定时计数器计数定时、运算比较,片内集成的12位DAC0控制转速,并且通过7279显示接口芯片实现数码显示等多项功能。系统采用外部晶振,系统时钟SYSCLK等于18432000,T0定时1ms,初始化时TH0=(-SYSCLK/1000)》8;TL0=-SYSCLK/1000。等待1s到,输出转速脉冲个数N,计算电机转速值。将1s内的转速值换算成1min内的电机转速值,并在LED上输出测量结果。2.2软件设计本系统采用C8051F060中的INT0中断对转速脉冲计数。定时器T1工作于外部事件计数方式对转速脉冲计数;T0工作于定时器方式均工作于方式1。每到1s读一次计数值,此值即为脉冲信号的频率,根据式(1)可计算出电机的转速。由于直流电机的转速与施加工于电机两端的电压大小有关,故将实际测得的转速值与预设的转速值比较,若大于预设的转速值则减小DAC0的数值,若小于转速预设的转速值则增加DAC0的值调整电机的转速,直到转速值等于预设定的值,这样就实现了对电机转速的控制,主程序和T0中断流程图如图2、3所示。DIValign=center/DIV为了比较精确的测量转轴转一圈的时间,设置定时器T0工作在方式2,允许中断,计数初值为0,当计数溢出时自动装入计数初值,以减小在其他工作方式下,由程序装入计数初值引起的测量误差.因方式2定时器的计数器仅为8位计数器,另设置一个16位的计数器i,每次定时器计数溢出时将其加1.单片机的时钟频率为6MHz,一个机器周期T的时间为2μS,该测量装置的最大计时时间为224×T≈33.55S,测量的最低转速为2转/min.测量误差小于0.5%的情况下,测量的最高转速可达每分钟十五万转(计数值为200,计时误差为1个机器周期).增大时钟频率,可以提高测量的最大转速和测量精度:转速=60×106/(i×256+TH0)×T式(2)中:i-定时器溢出次数,TH0-关闭定时器时定时器的计数值,T-单片机的机器周期,主程序流程如图5所示.存在问题与解决方法这种测量转速的方法无论是在电路上还是在算法上都比较简单,但其不足之处是在转速比较高时测量误差增大,此问题可以通过软件的方法解决.解决该问题的基本思路是:当转速大于某一值时,测量转轴旋转n转的时间,这样误差可以减小到原来的1/n.霍尔器件输出的脉冲信号,其频率和转速成正比.脉冲信号的周期与电机的转速有以下关系[4]:n=60/PT(3)式(3)中:n为电机转速,P为电机转一圈的脉冲数,T为输出方波信号周期.根据式(3)即可计算出直流电机的转速.电机霍尔传感器脉冲信号放大C8051F0607279LED4结论本测速系统采用集成霍尔传感器敏感速率信号,具有频率响应快、抗干扰能力强等特点。霍尔传感器的输出信号经信号调理后,通过单片机对连续脉冲记数来实现转速测控,并且充分利用了单片机的内部资源,有很高的性价比。经过测试并对误差进行分析发现,该系统的测量误差在5%以内,并且在测量范围内转速越高测量精度越高。所以该系统在一般的转速检测和控制中均可应用。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 wangleis72
wangleis72
本文标题:基于霍尔传感器的直流电机转速测量系统设计
链接地址:https://www.777doc.com/doc-2576997 .html