您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 交通运输 > 一级倒立摆课程设计要求
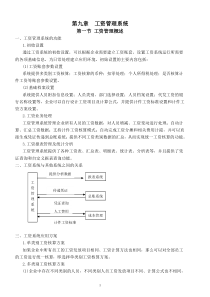
一、课程设计的内容与题目(1)直线一级倒立摆系统建模、仿真与实物控制(2)旋转一级倒立摆系统建模、仿真与实物控制二、课程设计的要求题目1:直线一级倒立摆系统建模、仿真与实物控制MFmgx参考面l要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、采用机理建模方法(应用经典力学理论)建立直线一级倒立摆系统的非线性动力学模型,并在摆杆竖直方向附近进行线性化。以小车加速度x为输入,摆杆角度和小车位移x为输出建立直线一级倒立摆系统的传递函数模型,在此基础上以摆杆角度、摆杆角速度、小车位移、小车速度为状态变量TxxX),,,(建立直线一级倒立摆系统的状态空间模型;2、应用经典控制理论和现代控制理论分析倒立摆系统的性能,包括稳定性、能控制性、开环响应分析(包括摆杆角度的单位脉冲响应、摆杆角度的单位阶跃响、小车位置的单位脉冲响应、小车位置的单位阶跃响应);3、要求系统输出动态性能满足%16.3%,3,sts试分别采用频域法和极点配置法设计控制器,并在在MATLAB/SIMULINK仿真环境下实现上述两类算法,记录实验结果并对结果进行分析。4、熟悉固高倒立摆实时控制软件,以直线一级倒立摆GLIP2001为对象采用上述两种算法实现对该倒立摆对象的实物控制,记录实验结果并对结果进行分析。5、采用PID控制算法实现直线一级倒立摆的稳定控制,其中PID控制器参数采用实验试凑的方法获得,记录实验结果并根据实验结果分析PID控制器的参数变化对系统控制图1为一个直线一级倒立摆系统示意图,该系统包含一个小车和一个安装在小车上的倒立摆杆。由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。M=1.096Kg,m=0.109Kg,b=0.1N/m/secl=0.25m,I=0.00223kg·m2性能的影响。6、倒立摆控制系统实物调试熟悉深圳固高公司的倒立摆实时控制软件,以直线一级倒立摆为对象采用上述三种算法实现对该倒立摆对象的实物控制调试。给出实际控制曲线和控制器参数,并对响应的动态指标进行分析;注意:在进行MATLAB实物控制实验时,不要过大地改变控制器参数,过大的参数会使系统有失控的危险具体实验步骤如下:(1)将小车扶到导轨中心位置上,并且使摆杆处于自由下垂的静止状态。(2)设置控制器参数、编译、连接、运行程序。(3)手动缓慢的提起摆杆到竖直向上的位置,在程序进入自动控制后松开手。(4)控制倒立摆;由于采用频域法设计的控制器以及PID控制器只能控制摆杆的角度,不能控制小车位置,所以小车可能向一个方向转动,因此当小车运动到一端时需要用工具档一下,以免悬臂转动到一端,对电机不利。极点配置控制方式可同时对摆杆角度和小车进行控制,因此不会出现这种情况。(5)观察控制效果:用金属棒碰一下摆杆,观察倒立摆在干扰信号作用下的输出响应。若不能达到指标要求,分析原因,重新设计,直到对实际系统的控制达到满意的结果。7、撰写课程设计报告和答辩PPT,对设计内容进行答辩。题目2:旋转一级倒立摆系统建模、仿真与实物控制图1为一个旋转一级倒立摆系统示意图,该系统包含一个悬臂和一个安装在悬臂上的倒立摆杆,悬臂和摆杆始终保持垂直。由于悬臂在水平方向可转动,因此,控制悬臂的转动可使摆杆维持直立不倒。图2旋转一级倒立摆系统示意图设计任务要求如下:1、建立旋转一级倒立摆的线性化数学模型;采用拉格朗日法建立旋转一级倒立摆系统的非线性动力学模型,并在摆杆竖直方向附近进行线性化。以旋转倒立摆系统的电压V为输入,以悬臂角度、悬臂角速度、摆杆角度、摆杆角速度为状态变量TX建立旋转一级倒立摆系统的状态空间模型为:V1493.4907275.49000103.06091.2510100000104.02751.14900100Vy0001000001本次课程设计,给出了旋转一级倒立摆的状态空间模型,要求:参考资料,理解利用拉格朗日法求解系统模型的一般步骤。2、MATLAB仿真(1)分析系统的性能;应用经典控制理论和现代控制理论分析倒立摆系统的性能,包括稳定性、能控制性、开环响应分析(包括摆杆角度的单位脉冲响应、摆杆角度的单位阶跃响、悬臂角度的单位脉冲响应、悬臂角度的单位阶跃响应);(2)设计控制器要求系统输出动态性能满足%16.3%,3,sts试(3)采用频域法设计控制器,给出设计步骤、实现程序、系统摆杆角度的仿真控制图形及控制器参数,并对系统控制效果的影响进行分析;(4)采用试凑法设计PID控制器,给出设计步骤、系统摆杆角度的仿真图形及PID控制器参数,并对各个参数对系统控制效果的影响进行说明。(5)采用极点配置法设计控制器,给出设计步骤、系统摆杆角度和悬臂角度的仿真控制图形及控制器参数,并对极点的位置和各个参数对系统控制效果的影响进行分析;(6)通过学生自行编制倒立摆的MATLAB控制仿真程序,自行进行控制器的设计和仿真,一方面让学生得到满足系统性能指标的控制器参数,另一方面让学生将理论分析与仿真结果进行对比,更直观地理解各参数对控制性能的影响。3、倒立摆控制系统实物调试熟悉加拿大QUANSER公司的倒立摆实时控制软件,以旋转一级倒立摆为对象采用上述三种算法实现对该倒立摆对象的实物控制调试。给出实际控制曲线和控制器参数,并对响应的动态指标进行分析;注意:在进行MATLAB实物控制实验时,不要过大地改变控制器参数,过大的参数会使系统有失控的危险具体实验步骤如下:(1)将倒立摆系统放到水平桌面上,并且使摆杆处于自由下垂的静止状态。(2)设置控制器参数、编译、连接、运行程序。(3)手动缓慢的提起摆杆到竖直向上的位置,在程序进入自动控制后松开手。(4)控制倒立摆;由于采用频域法设计的控制器以及PID控制器只能控制摆杆的摆角,不能控制悬臂的位置,所以悬臂可能向一个方向转动,因此当悬臂运动到一端时需要用工具档一下,以免悬臂转动到一端,对电机不利。极点配置控制方式可同时对摆杆角度和悬臂进行控制,因此不会出现这种情况。(5)观察控制效果:用金属棒碰一下摆杆,观察倒立摆在干扰信号作用下的输出响应。若不能达到指标要求,分析原因,重新设计,直到对实际系统的控制达到满意的结果。4、撰写课程设计报告和答辩PPT,对设计内容进行答辩。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 风的翅膀ADY
风的翅膀ADY
本文标题:一级倒立摆课程设计要求
链接地址:https://www.777doc.com/doc-2814959 .html