您好,欢迎访问三七文档
当前位置:首页 > 临时分类 > 《机械设计与研究》稿件范例
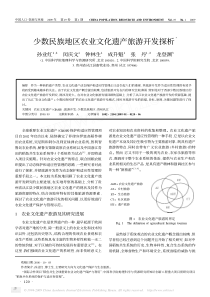
双点压力机主传动链关键机构尺寸与公差优化设计*柳乔1赵延明2刘德顺1曾磊3文泽军1刘婷1(1.湖南科技大学机械设备健康维护湖南省重点实验室,湘潭411201,E-mail:liuqiao32803@163.com;2.湖南科技大学信息与电气工程学院湘潭411201;3.湘潭江麓精密机械有限公司湘潭411202)摘要:针对双点压力机主传动链同步性不够的情况,综合考虑了曲柄转角相位差、杆长制造误差,采用有效杆长的方法,建立含间隙的压力机传动链位移差模型,并提出了双点压力机主传动链关键机构的尺寸及其公差优化模型,利用上述优化设计模型计算出主传动系统中关键机构的尺寸及制造偏差,为双点压力机传动链的尺寸和公差设计提供了依据。最后以某型号自动粉末压力机为例进行了分析,验证了所提模型的有效性。关键词:双点压力机传动链公差优化设计中图分类号:TH124文献标识码:AOptimizationDesignofDimensionsandToleranceofKeyMechanismofTwoPointPressMainTransmissionChainLIUQiao1ZHAOYanming2LIUDeshun1ZENGLei3LIUTing1(1.HunanUniversityofScienceandTechnology,HunanProvincialKeyLaboratoryofHealthMaintenanceforMechanicalEquipment,Xiangtan411201,China;2.SchoolofInformationandElectricalEngineering,HunanUniversityofScienceandTechnology,Xiangtan411201,China;3.XiangtanJiangluPrecisionMachineryCo.,Ltd,Xiangtan411202,China)Abstract:Aimingatinsufficientsynchronismoftwopointpressmaintransmissionchain,themodelofdisplacementdifferenceofpresstransmissionchainwithclearanceisproposedconsideringthephasedeviationofthecrankangleandthelengthdeviationoftherod,andtheoptimizationdesignmodelaboutkeymechanismoftwopointpressmaintransmissionchainisalsoestablished,throughtheabove-mentionedmodeldimensionsandmanufacturingdeviationofkeymechanismoftwopointpressmaintransmissionchainwillbefiguredout,thusitprovidesthetheoreticbasisfordimensionsandmanufacturingdeviationdesign.Finallyoneautomaticpowderpressistakenasanexampletoanalysisandshowsthattheproposedmodeliseffective.Keywords:twopointpresstransmissionchaintoleranceoptimizationdesign收稿日期:2013-基金项目:国家自然科学基金资助项目(51075143、51175171);湖南省教育厅资助项目(12W009)。双点压力机因其结构简单,加工和装配性能好,具有生产率高、材料利用率高等优点,在现代工业生产中占有十分重要的地位,是国防及民用工业生产中必不可少的生产工具。双点压力机对其运动精度有很高的要求,由于传动链中各零件存在加工误差,装配后存在积累误差,主要包括曲柄转角相位差、曲柄长度制造误差、连杆长度制造误差以及运动副间隙等,在传动中易出现两条主传动链的同步性不够而导致滑块两端产生位移差,一方面致使滑块上的压头在规定压制行程内的垂直度超出设计要求范围,对冲压模具造成损伤,另一方面使上压杆行程误差超出设计范围,从而影响所压制产品的质量。针对上述情况,国内很多外学者对此进行了研究:贾方[1,2]等建立了高速压力机机构动态误差模型,分析了间隙大小对机构动态误差的影响;郭惠昕[3]提出产品质量的模糊稳健优化设计建模方法,并以曲柄滑块为设计实例进行分析;郭惠昕等[4]将含旋转副间隙的构件分为两孔型、孔销型和两销型三类,建立相应的有效杆长计算模型,并综合考虑了杆长制造误差的影响,提出了一种平面连杆机构的稳健优化设计方法;谭晓兰等[5,6]提出了含运动副间隙的连杆机构稳健设计的一般原理,并以曲柄滑块机构为例,对其进行了稳健优化设计。但上述文献分析的是单曲柄滑块机构,没有对双传动链的压力机进行分析。尹吉磊[7],展卫国等[8]从理论上对双点压力机产生同步误差的原因进行了分析,并根据现场经验提出了部分解决措施;秦剑等[9]分析了对双点压力机垂直度影响的因素:曲柄转角相位差、曲柄长度制造误差和连杆长度制造误差等,找出了各因素与垂直度的关系,并对这些因素作了定量分析,为设计零件精度提供了一定的参考依据;张学银等[10]推导出了由文献[4]中三个因素造成滑块位移差的计算公式,为双点压力机同步的调整提供了理论依据。但文献[7]至[10]没有将旋转副间隙考虑在内,仅分析了两条传动链同步性对压力机精度的影响,没有对关键零部件尺寸及其公差进行优化。针对上述情况,本文综合考虑了曲柄转角相位差、曲柄长度制造误差、连杆长度制造误差以及运动副间隙,推导出滑块两端位移差模型,并以位移差均值最小为目标,压头垂直度误差和行程误差小于允许值为约束,建立双点压力机主传动链关键零部件尺寸与公差优化设计模型,最后以某型号自动粉末压力机为例进行分析。1双点压力机传动链位移差模型双点压力机主要是由两条可简化为曲柄滑块机构的传动链T1、T2组成,如图1所示。其中AB(A'B')为曲柄,长为1l('1l),BC(B'C')为连杆,长为2l('2l),(')为曲柄转角,M为连杆与滑块两连结点理想位置间的距离。理想状态下,双点压力机的两条传动链是同步运动的,滑块的位姿如图中实线框所示,与压力机中心对称线垂直,但在实际情况中,由于零部件制造、装配误差等原因,两条传动链存在位移差而致使滑块位姿与理想状态下会有一定偏差,如图中虚线框所示。为了便于分析,先对双点压力机传动系统中的1T链进行分析,得出该情况滑块运动规律,如图2所示,在不考虑误差的情况下,单传动链中滑块的位移1s的表达式为:221121cos(sin)slll(1)在实际生产中,机构构件生产不可能绝对精确,且适当的间隙能保证机构运转灵活[11],故在研究精密机械——压力机的运动精度时,运动副间隙是必须考虑的因素。T1T2MOl1l2l1'l2'CC'滑块θθ'BAB'A'图1压力机结构示意图l1l2s1ACBθ图2曲柄滑块机构示意图假设各个间隙对运动误差的影响是相互独立的。本文忽略移动副间隙,仅考虑旋转副的间隙对压力机产生的影响,旋转副的间隙采用连续接触模型[12],如图3所示,孔和销始终保持接触,可将旋转副间隙当作一个无质量的杆长r;为方位角,根据文献[11],在[0,2π]按均匀分布考虑。rα孔销图3孔销配合间隙示意图由文献[4]可知,若1l、2l分别是两孔型和孔销型长杆,如图4所示,那么利用有效杆长1L、2L分别代替式(1)中的基本杆长1l、2l,其中:aabbrrlLcoscos11(2)ccrlLcos22(3)式中:a、b、c,分别为图2中旋转副A、B、C处的间隙。l1l2s1ACBθ图4考虑间隙后曲柄滑块机构示意图可得到考虑旋转副间隙后滑块的运动规律:cos11Ls2122)sin(LL1(coscos)cosbbaalrr2221[(cos)sin(cclrl122coscos)]bbaarr(4)由于制造和装配误差,两曲柄转角会产生一个转角相位差,同理,双点压力机另一条链的滑块位移的表达式为:)cos('12Ls'22L12'21(sin())L12221cos()(''cos''cos')[(''cos')sin()(''cos'bbaaccbblrrlrlr122'cos')]aar(5)那么双点压力机两条链位移差f可表示为:12fss1222112212221cos(coscos)[(cos)sin(coscos)]cos()(''cos''cos')[(''cos')sin()(''cos'bbaaccbbaabbaaccbblrrlrlrrlrrlrlr122'cos')]aar(6)2双点压力机传动链优化设计模型双点压力机两条链的位移差反映了滑块两端的同步性,现取压力机工作过程中两条链位移差均值μf最小为目标函数。从式(6)可知,影响位移差f的变量有两条链的杆长)'(iill,其中i=1,2;间隙的无质量杆)'(jjrr,其中j=a,b,c;方位角)'(jj;曲柄转角。对于成批的压力机,两条链的杆)'(iill为服从正态分布的随机量,可表示为:Vliii(7)Vliii'''(8)式中:)'(ii、)'(ii分别为)'(iill的均值和标准差;V为服从标准正态分布的随机量,即)1,0(~NV。根据6公差设计原理,得:3/iil(9)3/''iil(10)式中:il('il)为杆长)'(iill的制造公差值的一半。将(9)、(10)代入(7)、(8)中,则)'(iill可表示为:Vlliii3(11)Vlliii3'''(12)间隙的无质量杆)'(jjrr为服从正态分布的随机量,可表示为:Vrjjj(13)Vrjjj'''(14)式中:)'(jj、)'(jj为)'(jjrr的均值和标准差,通过现场测量得到。方位角)'(jj为服从均匀分布的随机量,可表示为:Wj2(15)Wj2'(16)式中:W为服从均匀分布的随机量,即)1,0(~UW。取曲柄相位差为常量;压力机工作工程中,在下死点时对压力机精度要求最高,压头的垂直度与上压杆行程误差都必须在规定的范围内,因为压头垂直度超出规定范围,压头会损伤模具,上压杆行程误差超出范围会影响压制产品的质量;而在下死点之外处,压力机运动对所压制产品质量的影响不大,因此本文仅对在下死点处(即=0)的压力机传动链进行优化设计。一般来说,杆长均值、杆长对应的制造公差按照设计要求均相等,即'ii,'iill,现取模型的设计变量为1、2、1l、2l。在没有误差的情况下,0f,双点压力机滑块两端在工作过程中始终保持同步,压头的轨迹为一条铅垂线。在实际情况中误差是不可避免的,故kf(其中k为正实数),如果k值超出某一范围,那么压头在工作过程中便会发生偏离,从而导致压头损伤模具,故压头垂直度x应小于其允许误差,即[]xx;又在上压杆行程方向,如果行程误差超过规定范围][y,则会影响压制产品的质量,故上压杆行程误差应小于其允许误差,即[]yy。如图5所示,1T、2T为压力机两条传动链,DE为滑块(简化为直线),O、'O分别为压力机滑块压头(简化为点,分别为DE、''ED的中点)理想位置和实际位置,三角形HOO与三角形FEE的相似比为2,故fyx2tan2(17)在直角三角形DEF中,Mf/tan(18)222
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 yanxin32
yanxin32
本文标题:《机械设计与研究》稿件范例
链接地址:https://www.777doc.com/doc-2846720 .html