您好,欢迎访问三七文档
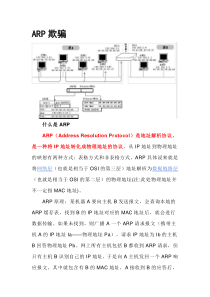
第三周小结总结:本周通过查阅《GPS测量原理及应用》、《GPS卫星导航定位原理与方法》、《GPS基本原理及其Matlbab仿真》、《GPS卫星导航基础》等书籍,对不理解的基础知识进行了补充理解。对GPS基本原理进行了学习,内容包括GPS系统下的坐标系,伪距的测量、用户位置的确定和由GDOP与测距误差的关系。达到的效果是熟练掌握了伪距测量、用户位置确定和GDOP的原理、方法和意义。一.GPS定位系统的坐标系天球坐标系:是一种惯性坐标系,其坐标原点和各坐标轴的指向在空间保持不动,可较方便地描述卫星的运行位置和状态。地球坐标系:是与地球体相固连的坐标系统,用于描述地面测站的位置。协议(平)地球坐标系的两种形式:1.地心空间直角坐标系原点——地球质心M;Z轴——指向地极原点CIO;X轴——指向格林威治起始子午面与地球平赤道的交点;Y轴——垂直于XMZ平面,且与X轴和Z轴构成右手系。2.地心大地坐标系地心大地坐标系如图,其地球椭球中心和地球质心重合,椭球短轴与地球自转轴重合。其中:大地纬度B——过地面点的椭球面法线与椭球赤道面的夹角;大地经度L——过地面点的椭球子午面与格林威治平大地子午面之间的夹角;大地高H——地面点沿椭球面法线到椭球面的距离。PHZpXpYpBLZXY地心大地坐标系因此,地面上任意一点P的位置,在地球坐标系中可表示为地心空间直角坐标(X,Y,Z)或地心大地坐标(B,L,H).这两种坐标系的换算关系为:X=(N+H)cos𝐵∙cos𝐿Y=(N+H)cos𝐵∙sin𝐿Z=[N(1-𝑒2)+H]sin𝐵;式中,N为椭球的卯酉圆曲率半径,e为椭球的第一偏心率。二.卫星与接收机间距离的测量卫星用户usr如图,用户的三维位置为r=s-u假定卫星钟与接收机钟完全同步,则真的卫星到用户的距离r=c∙∆t,(r=||s-u||,表示r的矩),c为光速,∆t为真的传播时间。而实际情况是接收机时钟、卫星时钟与系统时钟之间都有一定偏移误差,这样确定的距离则记作伪距ρ,若设两者之间误差为𝑡𝑢,则ρ=r+c𝑡𝑢。三.用户位置的确定为确定用户的空间位置(𝑥𝑢,𝑦𝑢,𝑧𝑢)和误差𝑡𝑢,则需要4颗独立卫星进行伪距测量,产生方程:ρ𝑗=√(𝑥𝑗−𝑥𝑢)2+(𝑦𝑗−𝑦𝑢)2+(𝑧𝑗−𝑧𝑢)2+c𝑡𝑢,j=1,2,3,4解算步骤:假定接收机一个近似位置(𝑥𝑢̂,𝑦𝑢̂,𝑧𝑢̂),则有近似伪距ρ𝑗̂=√(𝑥𝑗−𝑥𝑢̂)2+(𝑦𝑗−𝑦𝑢̂)2+(𝑧𝑗−𝑧𝑢̂)2+c𝑡𝑢̂,则近似位置与真位置的误差为(∆𝑥𝑢,∆𝑦𝑢,∆𝑧𝑢),将ρ𝑗在近似位置(𝑥𝑢̂,𝑦𝑢̂,𝑧𝑢̂)做泰勒展开,只保留一阶项得ρ𝑗=ρ𝑗̂-𝑥𝑗−𝑥𝑢̂𝑟𝑗̂∆𝑥𝑢-𝑦𝑗−𝑦𝑢̂𝑟𝑗̂∆𝑦𝑢−𝑧𝑗−𝑧𝑢̂𝑟𝑗̂∆𝑧𝑢+c∆𝑡𝑢,其中𝑟𝑗̂=√(𝑥𝑗−𝑥𝑢̂)2+(𝑦𝑗−𝑦𝑢̂)2+(𝑧𝑗−𝑧𝑢̂)2。整理得∆ρ𝑗=ρ𝑗̂−ρ𝑗=𝑥𝑗−𝑥𝑢̂𝑟𝑗̂∆𝑥𝑢+𝑦𝑗−𝑦𝑢̂𝑟𝑗̂∆𝑦𝑢+𝑧𝑗−𝑧𝑢̂𝑟𝑗̂∆𝑧𝑢-c∆𝑡𝑢。令𝑎𝑥𝑗=𝑥𝑗−𝑥𝑢̂𝑟𝑗̂,𝑎𝑦𝑗=𝑦𝑗−𝑦𝑢̂𝑟𝑗̂,𝑎𝑧𝑗=𝑧𝑗−𝑧𝑢̂𝑟𝑗̂,它们表示由近似用户位置到第j号卫星的单位适量的方向余弦。整理为矩阵形式:令∆ρ=[∆ρ1∆ρ2∆ρ3∆ρ4],H=[𝑎𝑥1𝑎𝑦1𝑎𝑥2𝑎𝑦2𝑎𝑧61𝑎𝑧51𝑎𝑥3𝑎𝑦3𝑎𝑥4𝑎𝑦4𝑎𝑧31𝑎𝑧41],∆x=[∆𝑥𝑢∆𝑦𝑢∆𝑧𝑢−c∆𝑡𝑢]则可以得到:∆ρ=H∙∆x,解为∆x=𝐻−1∆ρ用求得的∆x与假定近似位置重新组成近似位置,重复迭代,直到误差分量(∆𝑥𝑢,∆𝑦𝑢,∆𝑧𝑢)小于所要求的误差,则确定了符合用户精度要求的位置信息。四.GDOP与测距误差的关系由第三部分的分析可知:位置误差协方差矩阵为Cov(∆x)=([𝐻𝑇𝐻]−1)Cov∆ρ,由此式可见:用户的位置误差包括两大类:一是测距误差Cov∆ρ,二是定位星座的几何结构[𝐻𝑇𝐻]−1,它对测距误差起着放大作用。令[𝐻𝑇𝐻]−1=[[𝑎𝑥1𝑎𝑦1𝑎𝑥2𝑎𝑦2𝑎𝑧61𝑎𝑧51𝑎𝑥3𝑎𝑦3𝑎𝑥4𝑎𝑦4𝑎𝑧31𝑎𝑧41]𝑇[𝑎𝑥1𝑎𝑦1𝑎𝑥2𝑎𝑦2𝑎𝑧61𝑎𝑧51𝑎𝑥3𝑎𝑦3𝑎𝑥4𝑎𝑦4𝑎𝑧31𝑎𝑧41]]−1=[𝛿𝑥2𝛿𝑥𝑦𝛿𝑦𝑥𝛿𝑦2𝛿𝑥𝑧𝛿𝑥𝑡𝛿𝑦𝑧𝛿𝑦𝑡𝛿𝑧𝑥𝛿𝑧𝑦𝛿𝑡𝑥𝛿𝑡𝑦𝛿𝑧2𝛿𝑧𝑡𝛿𝑡𝑧𝛿𝑡2],人们给出定义GDOP=√𝛿𝑥2+𝛿𝑦2+𝛿ℎ2+𝛿𝑡2为几何精度因子,即GDOP=√𝑡𝑟𝑎𝑐𝑒[𝐻𝑇𝐻]−1。所以它与定位星座与用户位置构成的几何结构有关,表示测距误差的放大系数,且GDOP值越小,测定精度的损失就越小。四.专业术语1.完好性风险是指“存在使定位误差超出限值的故障但是没有监测到的概率,完好性风险=卫星故障发生概率×故障漏检率;2.SSE(SumofSquaresforError)即残差平方和.反映每个样本各观测值的离散状况,又称为组内平方和或误差项平方和;3.SPS:标准定位服务,使用C/A码,民用;4.PPS:精密定位服务,使用P码,军用;5.SA:SelectiveAvailability,选择可用性:人为降低普通用户的测量精度;
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 cutdown777
cutdown777
本文标题:GPS定位原理
链接地址:https://www.777doc.com/doc-2874677 .html