您好,欢迎访问三七文档
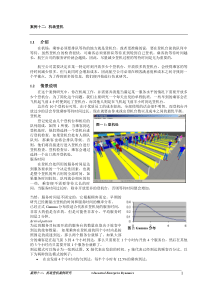
CAN背景特点原理协议通讯结构遥测遥控测量仪器蜘蛛形机器人通讯系统3CAN总线CAN(ControllerAreaNetwork)即控制器局域网,可以归属于工业现场总线的范畴,通常称为CANbus,即CAN总线,是目前国际上应用最广泛的开放式现场总线之一。CAN最初出现在汽车工业中,80年代由德国Bosch公司最先提出。最初动机是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,它在汽车领域上的应用最为广泛,世界上一些著名的汽车制造厂商,如BENZ(奔驰)、BMW(宝马)、volkswagen(大众)等都采用了CAN总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。带有中央控制单元的车带有三个中央控制单元的车带有三个中央控制单元和总线系统的车汽车总线网络系统高速总线中速总线低速总线发动机控制ECU悬架控制ECU牵引力控制ECUABS控制ECUASR控制ECU网关1仪表显示ECU安全气囊ECU故障诊断ECU燃油喷射ECU信息中心ECU中央门锁ECU座椅调节ECU电动门窗ECU前车灯ECU后车灯ECU网关2ISA插槽PCI插槽AGP插槽北桥芯片组南桥芯片组内存插槽CPU插槽IDE接口软驱接口并口连接器串口连接器ROMBIOS鼠标键盘USB接口主板电源插座总线遵循同一技术规范的连接与操作方式总线总线是连接多个功能部件的符合一定规范要求的一组公共信号线计算机中各功能部件之间的信息是通过总线传输的总线BUS存储器I/O接口输入设备I/O接口输出设备CPU存储器I/O接口输入设备I/O接口数据总线DB控制总线CB地址总线AB输出设备CPUCAN的技术规范协议发布者特征应用领域SAEJ1939SAE为商用车辆和工程机械中各控制器之间的实时数据交换提供完整的方案。商用车和工程机械CANopenCANinAutomation指定了标准通讯机制和设备功能性,可以无经许可自由使用。自动控制CAN嵌入式系统CANaerospaceStockMicrocomputerSystems考虑航空航天领域里一些特殊的要求如:安全、认证、用户定义报文类型的开放性和简单应用。航空电子和空间技术5.1.3位数值表示和通信距离“显性”位0和“隐性”位1若总线上有两个以上驱动器同时分别发送“0”和“1”,其结果是总线数值为显性“0”。VCAN-HVCAN-L隐性位隐性位显性位如何讲协议:在两个(或多个)通信实体之间控制信息交换的规则和约定就是通信协议。一个通信协议通常对语法、语义和定时三个方面进行约定。讲什么事件发生的顺序、速度匹配、同步规则等。5.1.3位数值表示和通信距离“显性”位0和“隐性”位1若总线上有两个以上驱动器同时分别发送“0”和“1”,其结果是总线数值为显性“0”。VCAN-HVCAN-L隐性位隐性位显性位5.2.1基本概念——标识符的逐位仲裁01ArbitrationLostModule1Module2BusLine显性隐性失去仲裁节点1节点2线上可见20优点在网络最终确定哪一个站的报文被传送以前,报文的起始部分已经在网络上传送了。所有未获得总线读取权的站都成为具有最高优先权报文的接收站,并且不会在总线再次空闲前发送报文。CAN具有较高的效率是因为总线仅仅被那些请求总线悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。CAN总线位仲裁技术21缺点由于CAN总线采用的是固定优先级,当所有的节点都随机的向总线发送数据时,具有低优先级的节点是比具有高优先级的节点具有较大的发送失败几率。每次具有较低优先级的节点都会在总线竞争中失败,从而导致它一个数据都发不出去,或者发送的数据有较大的延时。CAN总线位仲裁技术帧数据帧遥控帧错误帧过载帧帧间隔.数据链路层帧起始远程传输请求仲裁场12位标识位11位标识符扩展位位填充无位填充CAN标准数据帧使用位填充的最大帧长度为127位控制场6位数据场R0数据长度代码数据值0-64位循环冗余校验15位循环冗余校验界定符1位应答场2位帧结束7位帧起始远程传输请求仲裁场32位标识位11位替代远程请求标识符扩展位扩展标识位18位位填充无位填充CAN扩展数据帧使用位填充的最大帧长度为150位控制场6位数据场R0R1数据长度代码数据值0-64位循环冗余校验15位循环冗余校验界定符1位应答场2位帧结束7位CAN标准数据帧格式CAN总线错误位错误填充错误CRC错误格式错误ACK错误CAN错误帧格式错误种类错误状态位时序SYNC_SEG:同步段PROP_SEG:传播时间段PHASE_SEG1&PHASE_SEG2:相位缓冲1相位缓冲2SYNC_SEGPROP_SEGPHASE_SEG1PHASE_SEG2BITTIMESamplePointTransmitPointSAMPLEPOINT:Thebusvalueatthispointistakenasthevalueofthebit(if3samplesperbittaken,thisispositionof3rdsample).硬同步接收单元在总线空闲状态下检测出帧起始时进行的同步调整CAN控制器SJA1000在系统中的位置传感器执行元件MMI模块控制器CAN控制器CAN收发器TXRX传感器执行元件MMI微控制器SJA100082C250TXRXCAN总线分布模块1分布模块22SJA1000CAN控制器CAN控制器SJA1000在系统中的位置传感器执行元件MMI模块控制器CAN控制器CAN收发器TXRX传感器执行元件MMI微控制器SJA100082C250TXRXCAN总线分布模块1分布模块2SJA1000的模块结构发送缓冲区验收滤波器接收FIFOCAN2.0B核心模块接口管理逻辑主控制器收发器SJA1000CAN总线线路SJA1000与单片机典型接口电路1CAN通信控制器82C2002机器人机体内部采用主从分布式控制地面PC机工控机CAN总线第1腿第6腿……髋关节膝关节踝关节足二关节WiFi无线局域网1.6控制系统1、蜘蛛形机器人通讯结构1可以测量出裂缝图像中裂缝宽度、长度、方向。2利用软件使观察裂缝更加直观,提高了效率和精度。1.9视频检测系统1、蜘蛛形机器人检测平台实施技术方案1.2项目实施方案1、项目基本情况1.2.1桥梁底部和侧面无损检测方案7)视频检测系统研究
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 qyshfhy001
qyshfhy001
本文标题:CAN总线原理
链接地址:https://www.777doc.com/doc-2903207 .html