您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 汽车动力学中若干关键状态和参数估计研究的现状与发展
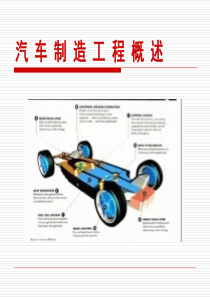
汽车动力学中若干关键状态和参数估计研究的现状与发展赵又群南京航空航天大学,南京,210016摘要:阐述了汽车动力学中若干关键状态和参数估计研究的重要性。描述了汽车动力学中若干关键状态和参数估计的内涵,给出了主要的研究方法和一些应用实例。最后指出了汽车动力学中若干关键状态和参数估计研究中的关键问题,并指出该项研究能够为汽车动力学建模、汽车底盘控制系统开发奠定必要的理论基础。关键词:汽车动力学;状态估计;参数估计;现状与发展中图分类号:U461暋暋暋文章编号:1004—132X(2010)10—1250—04PresentStateandPerspectivesofEstimationResearchforSeveralKeyStatesandParametersinVehicleDynamicsZhaoYouqunNanjingUniversityofAeronauticsandAstronautics,Nanjing,210016Abstract:Thesignificancetodevelopestimationresearchforseveralkeystatesandparametersinvehicledynamicswasdiscussed,andtheresearchmethodsweresummarized.Theconnotativemeaningsweredescribedfortheestimationofseveralkeystatesandparametersinvehicledynamics,andthemainresearchmethodsandsomeapplicationexamplesweregiven.Finally,themostimportantproblemswerepresented,andtheresearchcanpresentsomebasictheoryofvehicledynamicsmodelingandvehiclechassiscontrol.Keywords:vehicledynamics;stateestimation;parameterestimation;presentstateandperspective收稿日期:2009—10—09基金项目:国家863高技术研究发展计划资助项目(2008AA11A140);国家自然科学基金资助项目(10902049)0暋引言准确实时地获取汽车动力学的参数和状态信息,是实现汽车动力学建模、汽车反馈控制的前提和必要条件。在汽车稳定控制系统和侧向控制系统中,汽车的侧偏角是重要的反馈控制变量[1]。轮胎力是汽车动力学建模的关键因素,对于汽车底盘控制非常重要。汽车避撞系统、自动道路保持系统以及ABS系统中都要求具有“道路适应性暠,轮胎-道路间的动力学特性参数是保证“道路适应性暠的重要信息。目前,能否获取精确的汽车动力学控制的状态信息和道路信息,已经成为汽车底盘控制系统发展急需解决的关键问题。直接测量如汽车侧偏角、路面附着系数、轮胎侧偏刚度这些状态或参数,要么非常困难,要么测量成本非常高。因此,用传感器测出易获取变量,再进行状态参数估计,是一种非常重要的辅助测量手段。本文对汽车底盘控制系统中需要的若干关键汽车动力学状态和参数(如汽车侧偏角、轮胎-路面间附着系数和轮胎侧偏刚度等)的实时估计进行综述,希望既能为汽车动力学中若干关键状态和参数估计研究提供必要的基础和方法指导,又能为降低测试成本和实现测量通用灵活性提供必要的手段和参考依据。1暋汽车侧偏角估计1.1暋常用方法由于无法在产品车(非试验车)中直接测量侧偏角,因此侧偏角必须通过状态估计的方法进行获取。侧偏角的获取一般有两种方法:一种方法是通过组合惯性传感器进行估计,另一种方法是利用惯性传感器和基于线性汽车动力学模型的估计器联合进行状态估计[2]。1.2暋GPS辅助方法美国Auburn大学的Bevly等[3]近年来一直从事利用GPS系统进行汽车状态估计的研究,但Bevly提出的方法没有考虑陀螺仪的比例因子误差,后他的学生提出对于陀螺仪的比例因子误差具有鲁棒性的侧偏角估计新方法[4]。近来,斯坦福大学的Ryu等[5]尝试着利用双天线GPS系统针对对汽车侧倾和道路坡度有影·0521·中国机械工程第21卷第10期2010年5月下半月响的车身侧偏角进行了频率在10~20Hz之间的在线估计。马自达汽车公司的Fukuba等[6]通过装在车上的RTK-GPS评估一辆汽车的六自由度运动,可以间接得到汽车侧偏角的估计值,但该系统用到四个GPS接收机和三个光纤陀螺仪,成本很高。1.3暋非线性方法汽车侧偏角还可以通过构造非线性观测器来进行估计。意大利Parma大学的Stephant等[7]在这方面做了不少研究,比较了一种线性汽车侧偏角的观测器和三种非线性观测器。神经网络对于处理非线性问题具有很好的效果,而汽车恰是一个高度非线性的复杂系统,因此有学者把神经网络应用于汽车侧偏角的估计[8]。另外还有一些比较特殊和新颖的方法来估计汽车侧偏角,如吉林大学与荷兰TNO研究所合作提出了基于模糊逻辑的汽车侧偏角估计方法[9]。1.4暋国内研究状况倪江生[10]基于卡尔曼滤波算法对汽车运动参数的测试方法进行了相关研究,高振海等[11]用卡尔曼滤波算法对汽车状态进行了线性最小均方误差估计,该方法可以推广到汽车侧偏角的估计。吉林大学对有/无陀螺仪的组合导航算法用于汽车状态信息的测量进行了研究,在无陀螺仪的时候采用加速度传感器和GPS组成的导航系统对汽车进行状态估计[12飊13]。虞明等[14]利用GPS载波相位RTK技术研制成功了汽车道路试验RTK五轮仪。王乐等[15]应用该五轮仪较准确估算出汽车侧偏角。2暋路面附着系数估计在一定的轮胎垂向载荷作用下路面所能提供的最大的轮胎力由轮胎-路面峰值附着系数来决定。因此,在已知轮胎垂向载荷时,轮胎-路面间附着系数的估计可以转化为轮胎力的估计。如果实际的轮胎-路面峰值附着系数可以实时获取,那么汽车主动安全控制系统中的自适应巡航控制、ABS、牵引力控制、避撞控制等的控制算法,可以进行自主调整以适应不同的外部驾驶工况。2.1暋轮胎纵向力估计对于轮胎纵向力的估计方法研究主要可分为以下方法:栙通过汽车纵向加速度测量和ABS或GPS等来估计轮胎纵向力[16];栚通过车轮角加速度和驱动扭矩测量来估计轮胎纵向力[17飊18];栛通过纵向滑移和轮胎力测量来识别轮胎模型[19];栜通过状态或参数估计的方法来识别轮胎力,如扩展卡尔曼滤波方法[20]。以上四种方法中的前三种是基于传感器的直接测量法,估算精度比较高,但实验测量难度比较大,成本比较高;第四种是基于状态估计方法的间接测量或软测量法,利用简单易测的实验数据(包括车轮角速度、汽车纵向和横向加速度以及横摆角速度)和量测输入(转向盘转角)并通过扩展卡尔曼滤波算法来进行轮胎力的估算,这种方法简便易行,但是估计精度受算法影响。2.2暋轮胎侧向力估计文献[21]对于轮胎-路面侧向力的估计进行了深入的研究,提出了一种基于汽车侧向动力学测量的轮胎侧向力估计方法,运用了DGPS和陀螺仪测量,并把轮胎侧向力模型表达为轮胎侧偏角、摩擦因数、垂直力和侧偏刚度的函数。该方法的优点在于不需要大的纵向滑移来提供附着力的可靠估计。文献[22]则利用扩展卡尔曼滤波对非线性轮胎的纵向力和侧向力进行了联合估计。2.3暋国内研究状况余卓平等[23]利用轮边驱动电动汽车的驱动力矩对路面附着系数进行了较为精确的估算。边明远等[24]提出了一种含有3个参数的双指数形式的纵向道路附着系数计算模型。文献[25]通过对滑模观测器和卡尔曼滤波器相结合对汽车轮胎纵向力进行了估计,并通过带遗忘因子的递推最小二乘算法(RLS)和CUSUM变化检测算法对路面附着系数进行了估计。3暋轮胎侧偏刚度估计在轮胎机械特性中,轮胎侧偏刚度是汽车动力学建模的重要参数。Anderson等[26]在应用GPS/INS系统估计汽车侧偏角的同时也给出了轮胎侧偏刚度的估计方法,并用新得到的侧偏刚度对估计器进行了参数更新。另外,对于侧偏刚度的估计还可以采用非线性观测器的方法[27]。文献[21]在轮胎侧向力估计的基础上识别了轮胎—路面附着系数和轮胎侧偏刚度。刘喜东等[28]从汽车动力学微分方程联立的角度探讨了如何估算动载荷作用下客车的侧偏刚度。·1521·汽车动力学中若干关键状态和参数估计研究的现状与发展———赵又群4暋汽车动力学中多状态估计方法基于汽车动力学模型,通过合适的状态估计方法可以同时对多个汽车关键状态量进行估计。4.1暋卡尔曼滤波算法的应用卡尔曼滤波算法、扩展卡尔曼滤波算法分别是处理线性系统、非线性系统状态估计常用的方法,可以满足汽车状态估计器对实时性的要求,在汽车的多状态估计当中有较多应用,如线性卡尔曼滤波算法[29]、扩展卡尔曼滤波算法[30飊31]、扩展自适应卡尔曼滤波算法[32]、鲁棒自适应卡尔曼滤波算法[33]、模糊卡尔曼滤波算法[34]等。线性卡尔曼滤波只能采用线性汽车动力学模型进行状态估计;扩展卡尔曼滤波可以采用非线性汽车模型进行状态估计;扩展自适应卡尔曼滤波和模糊卡尔曼滤波可以对噪声统计特性时变的非线性汽车模型进行状态估计。这些方法都是基于时不变的汽车模型,即汽车的结构参数固定不变,因此可能会导致状态估计的精度下降甚至出现滤波发散的情况。4.2暋基于鲁棒状态观测器的状态估计为了补偿汽车模型时变所产生的误差对估计精度的影响,状态观测器对已知车辆状态进行估算,将估算结果与测量结果之差作为反馈,用来修正估计结果。这类方法可以基于时变的车辆模型设计各种鲁棒状态观测器,如通过构造非线性观测器对质心侧偏角、横摆角速度、侧向加速度进行估计[35飊36],对侧倾角进行精确估计[37]。5暋关键问题无论是单一的侧偏角估计还是全状态和参数的估计,都需要基于模型的估计算法研究,因此,汽车动力学模型的建模准确程度是至关重要的。如何建立一个较为接近真实情况、并且能够较为准确反映各种工况下过程噪声和量测噪声的时变统计特性以及非线性特性的汽车动力学估计模型,是关键问题之一。路面附着系数的估算可能要用到RTK五轮仪和ABS轮速传感器,而基于GPS技术的RTK五轮仪和ABS轮速传感器的信号采样频率有较大差异。因此,含有噪声的低频的RTK五轮仪信号和高频的ABS轮速传感器信号的融合技术,是另一个关键问题。6暋结束语综上所述,汽车动力学中关键状态和参数的实时估计研究工作,如汽车侧偏角、路面附着系数和轮胎侧偏刚度等的实时估计,能够为汽车动力学建模、汽车底盘控制系统开发奠定必要的理论基础。另外,开展汽车结构参数(质量、转动惯量、质心位置等)的在线辨识或估计,能够为汽车参数测量技术的研究提供新的思路。参考文献:[1]暋DailyR,BevlyDM.TheUseofGPSforVehicleStabilityControlSystem[J].IEEETransactionsofIndustrialElectronics,2004,51(2):270飊277.[2]暋KienckeU,DaissA.ObservationofLateralVehicleDynamics[J].ControlEngineeringPractice,1997,5(8):1145飊1150.[3]暋BevlyDM,GerdesJC,WilsonC.TheUseofGPSBasedVelocityMeasurementsforMeasurementofSideslipandWheelSlip[J].VehicleSystemDynam灢ics,2003,38(2):127飊147.[4]暋AndersonR,BevlyDM.EstimationofSlipAnglesUsingaModelBasedEstimatorandGPS[C]//Pro灢ceedingsoftheAmericanControlConference.Bos灢ton:IEEE,2004:212
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 鼎盛潜龙
鼎盛潜龙
本文标题:汽车动力学中若干关键状态和参数估计研究的现状与发展
链接地址:https://www.777doc.com/doc-300051 .html