您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 硕士论文-汽车稳定性控制系统(vsc)的参数标定与匹配优化
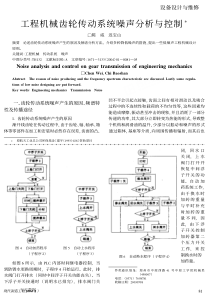
上海交通大学硕士学位论文汽车稳定性控制系统(VSC)的参数标定与匹配优化姓名:陈孟春申请学位级别:硕士专业:车辆工程指导教师:殷承良;熊恭祥20051101VSCHummer2IzMatlab/SimulinkHummer2,Hummer2VSCMatlab/SimulinkABSTRACTThispaperanalysesVSCresearchfulpurpose,developmentstatusandtaskprinciples.Thispaperdiscussesthefoundingofthetwo-degree-freedomvehicledynamicsmodelthatcanbeusedinroad-holdingproperty.Bycontrastingtestdatawithsimulatingdata,thedynamicsmodelandmodelparametersarerightcanbeproved.TyreparametersaremeasuredbyJilinIdustryUiversityTyreLab.Inordertoinsuresimulinkprecision,Iextendsthetyredatabythemethodoffiveranksmoothness.IcalculatesIzbyusingexperienceformula.UtilizingthetoolofMatlab/Simulinkanalysisthetwo-degree-freedomvehicledynamicsmodel,findtheruleofstabilizationellipse.ByanalyzingthevehicleofHummer2stabilizationellipse,thevehicleinthelimitstatus,anextraneousmomentcanreducecenterofgravityside-slipangle,leadthevehiclecomebackstabilizationstatus.TheVehiclestabilityControlsystemmusthavethefunctionofmakingthevehiclecomebackstabilizationstatus.KeyWordsvehicledynamicsMatlab/Simulinktwo-degree-freedomvehicledynamicsmodelstabilizationellipsestabilitystabilitycontrol120051222251180km/h100km/h40%160km/hABSTC(VSC)VSCABSASRABSASR512ABSASR90(DYC:DirectYawControl)1995Bosch,BMW,Ford,TOYOTABOSCHVDCECUECU513(EMS)ECU—YSCYawStabilityControl————()——()SteerByWireVehicleStabilityControlABSTC,514——1T12T23T3321TTTTΔ+Δ+Δ=Δ1-1Fig.1-1alltireengenderyawmomentinbrakeforce5154WSFig.1-2vehiclestabilitycontrolsketchmapofyawvelocitycontrol,516Ø1-2ØØØ(1)YSCYSCYSCABSYSC(2)YSCABSYSCABSVSC517;VSCVSCHummer2VSCHummer2Hummer2VSCVSC5182.1.1.12-1Hf(t)y(t)Fig.2-1system[1]2.1.1.2,519,[2][3]5110[4]2.2.12.2.22.2.3FyFyFz()a×-×=111BeAFyFz()FzBeAFy×-×=212A1B1A2B22.2.4[5]Pacejka[6]MagicFormula()()SvBCDFyΔ+=jarctansin2.1:5111))(arctan()/())(1()()1())arctan(sin(30.1112109872612543221hhzzzzzzzSaBBESaEFaFaSvaShaFaFaEaCDFaaaBCFaFaDΔ++Δ+-=+=Δ=Δ++=-==+=jgggDBECShSvi13i=113[4]2.3.1Fig.2-2two-degree-freedomvehicledynamicsmodel51122-2xuyvzr3210avaua++32100aaarv++1a2a3axyz3210amvamuaL++=2.232100aIaaHrv++=2.3LHxrxfrFFvum+=-)(v&2.4yrfyfrFFuvm+=+)cos()(dv&2.5yrfyfrbFaFI-=)cos(dv&2.6Urvv2.4yrfyfrFFuvm+=+)cos()(dv&2.75113yrfyfrbFaFI-=)cos(dv&2.82.72.8uvuwv=atan2.91rfavvv+=2.10rrbvvv-=2.11tan,Ubvuvrwwrva-==2.12f,Uvfff=datan2.13frfUavdva-+=2.14ffyfCFa-=2.15rryrCFa-=2.162.152.162.72.85114)cos())cos(())cos(()(fffrrffrffrCUbCaCvUCCuvmddvddv+--+=+&2.17fffrrffrffraCUCbCavUbCaCIddvddv)cos())cos(())cos((22++--==&2.182.172.18MATLABMATrixLABoratory20CleveMolerLINPACKEISPACKFORTRANMATLABLittleLittleMolerSteveBangert1984MathWorksMATLABMATLABCMATLABMATLAB20MATLAB30MATLABMathematicaMapleMathcadMathWorks1993WindowsMATLAB4.04.x51151SIMULINK2MapleSymbolicMathToolbox1.03NotebookMathWorksWordDDEOLEMATLABWord19975.05.15.25.36.06.16.57.0MATLAB20026.5JITMATLABCSimulinkMATLABSimulinkSimulinkSimulink[7]1SimulinkGUI-GraphicalUserInterfaceSimulinkSimulink251163SimulinkMATLABMATLABMATLABSimulinkMATLABSimulinkSimulinkMCommunicationsToolboxControlSystemToolboxFinancialToolboxFrequency-DomainSystemIdentificationToolboxFuzzyLogicToolboxHigher-OrderSpectralAnalysisToolboxImageProcessingToolboxLMILMIControlToolbox[8]SimulinkDSPMATLAB/Simulink5117MatlabSimulinkmatlabZ2-3Fig.23Parameterprogramofsimulinkmodel5104002-45118SimulinkLook-UpTable(n-D)2-5Look-UpTable(n-D)Fig.2-4Therelationcurveoftireside-slipangleandside-slipforce2-5Fig.2-5Theoutputoftireside-slipforceintheassuredtireside-slipangle5119MatlabSimulink2.72.82.122.142-6Fig.2-6Thesimulinkstructuralchartofroad-holdingproperty2-65120ZIzIz3-1[10]IzZTZLGrrTIz22124p=3.1Ts21rrmmLmGN5121Fig.3-1Themeasuresketchmapofinertia3.5t5mm3.1.2Iz[11]m)(⋅⋅=KWBTWIz3.2TWmWBmmkgK3-151223-1K[12]K5.29015.50%3.98%(20.40%)WB2.41m4.21933.74%3.52%(19.10%)WB2.41m3.45105.24%3.69%(20.05%)3.37837.85%4.83%(19.40%)Iz3.47346.44%5.30%(18.64%)3.2.13.2.23712.5R16.53.2.33-2Fig.3-2Thestructuresketchmapoftiredynamicresponce51233-2200¾400mm0¾20kN-25¾25deg.-15deg.¾15deg.5cm/s¾35cm/s10kN5mFig.3-3Thetestsetphotooftiredynamicresponce5124Fig.3-4Thetestsetphotooftiredynamicresponce51253.2.4[13]:3-33-3ADVANCE37X12.5R16.580160KpaKgDeg.NDeg.N0.00000.00000.00000.00000.4883-508.94140.4883-673.56870.9644-952.20921.0620-1353.83081.9409-1896.40782.0752-2136.68423.9673-2651.72324.0527-2884.27725.9937-2954.00425.9937-3243.21207.9712-3093.72288.0200-3451.305211.9385-3195.270412.0727-3687.681215.9424-3326.159216.0400-3876.674279519.9951-3464.888020.0439-4100.56500.00000.00000.00000.00000.4883-496.49940.4883-698.21860.9644-1025.48181.0132-1429.43781.9775-2050.41482.0752-2390.62184.0039-2998.32964.1016-3398.48325.9937-3302.04145.9937-3690.21947.9712-3476.46188.0689-3920.784011.9751-3685.152812.0727-4231.483215.9424-3855.731616.0400-4477.002689419.9951-4004.103620.0928-4759.33080.00000.00000.00000.00000.4395-592.34240.5371-883.58860.9644-1175.05921.0132-1682.37581.9409-2422.36402.0752-3026.92603.9673-3731.37944.0161-4537.54705.9448-4297.64305.9937-5072.27427.9712-4634.07708.0200-5469.321211.9385-4992.433612.0727-5936.947815.9424-5258.493816.0400-6456.6908119019.9463-555
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 wjw7923
wjw7923
本文标题:硕士论文-汽车稳定性控制系统(vsc)的参数标定与匹配优化
链接地址:https://www.777doc.com/doc-305737 .html