您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 电子设计/PCB > 第三章 船用气动仪表 第四节 气动调节器163
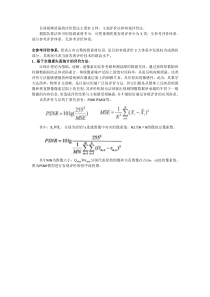
考点1QTM-23J气动波纹管式比例积分微分(PID)三作用调节器是按力矩平衡原理工作的,其结构原理如图3-4-1所示。它主要由四个部分组成:比较部分、放大部分、比例积分部分和微分部分。比较部分是由测量波纹管F、给定波纹管G、负反馈波纹管E、正反馈波纹管H及挡板4、喷嘴5和具有弹性交点的杠杆6等元件组成。当测量、给定、负反馈和正反馈信号对杠杆6产生力矩的代数和等于零时,杠杆处于平衡状态,挡板的开度固定不变。放大部分由喷嘴挡板机构及其后面串联的功率放大器组成。放大器的输出P出是调节器的输出,送到执行机构。比例积分部分由比例加积分部分组成。比例部分由比例阀RP(可调气阻)、恒气阻RF和正反馈波纹管H组成。积分部分由积分阀Ri(可调气阻)、节流盲室J和1∶1跟踪器12组成,积分作用是由正反馈实现的。微分部分由接受测量信号的波纹管K、接受负反馈信号波纹管L、喷嘴3,挡板2、具有弹性支点的杠杆1以及微分恒节流孔7、微分阀Rd(可调气阻)、微分气容Cd和弹性气容M等元件组成。由变送器送来的测量信号先引入波纹管K,经微分部分先得到一个微分输出并送入比较部分的测量波纹管F。图3-4-lQTM-23J气动PID三作用调节器的结构原理图l、6-平衡杠杆;2、4-挡板;3、5-喷嘴;7、9-恒节流孔;8-放大器;10-膜片;11-喷嘴;12-1:1跟踪器该调节器的工作过程是:假定在初始平衡状态的基础上,被控参数升高,经变送器输出的测量信号P测增大了ΔP,挡板2靠近喷嘴3,喷嘴背压瞬间增加,这个增大的信号分三路:一路直接送入比较部分的测量波纹管F,使挡板4靠近喷嘴5,喷嘴背压升高,经放大器放大,调节器输出信号瞬间增大;二路经弹性气容M挤压微分气室Cd的空气,使波纹管L中的气压信号瞬间增加,限制挡板2继续靠近喷嘴3。当波纹管K和L中的气压信号对杠杆1产生的力矩与系统的弹性力矩的代数和等于零时,杠杆1瞬间达到暂时的平衡。此时微分部分输出的信号最大,相应于调节器的输出信号也是最大的;三路经微分阀Rd不断向波纹管L充气,这就破坏了杠杆1的暂时平衡使挡板2不断离开喷嘴3,测量波纹管F接受的测量信号随之减小。这就是微分输出的消失过程。当波纹管L的气压信号增加到与波纹管K相同时,杠杆l又处在新的平衡状态,其微分输出就是ΔP。可见微分部分是比例带为100%的比例微分环节(微分器),它输出一个超前的控制信号。改变微分阀Rd的开度可以调整微分时间,关小微分阀,微分时间长,微分作用强;反之,微分作用弱。测量波纹管F接受微分部分输出的超前控制信号,破坏了杠杆6的初始平衡状态,挡板4靠近喷嘴5使调节器的输出信号增大。这个增大的输出信号分四路。一路送到执行机构,控制调节阀的开度。二路直接送入负反馈波纹管E,限制挡板继续靠近喷嘴。三路经比例阀RP、恒气阻RF及正反馈波纹管组成的节流分压器送入正反馈波纹管H。显然调整比例阀的开度可以调整进入波纹管H的气压信号大小。当波纹管F、G、E、H所接受的信号对杠杆6产生的力矩与系统的弹性力矩的代数和等于零时,杠杆6处于暂时的平衡状态。此时调节器的输出P出与测量波纹管接受的气压信号PF,成正比,这就是比例作用规律。开大比例阀RP可加强正反馈,使比例作用强,即减少小比例带;反之比例带大。四路调节器的输出P出经积分阀向盲室J充气,1∶1跟踪器膜片10上面的气压信号随时间按指数函数增加,挡板10不断靠近喷嘴11,使由气源来的气体经喷嘴11排入大气量减少,1∶1跟踪器经恒气阻RF输出的信号不断增加(1∶1跟踪器膜片下面的压力始终跟踪膜片上面的压力变化)。因此,正反馈波纹管H在比例输出的基础上,其压力信号又逐渐增加,挡板4又逐渐靠近喷嘴,使调节器的输出P出又不断增加,这就是积分部分的输出。显然,改变积分阀的开度可以调整积分时间,积分阀开大积分时间短,积分作用强;反之,积分作用弱。比较部分最后平衡时,PH=PE=P出,因此经调节器的控制作用,测量值PF必定要回到给定值PG,即PF=PG,可见积分作用能消除静差,实现无差控制。考点2M58型调节器是通用型的比例积分微分发调节器,其结构原理如图3-4-2所示。在浮动环3的下面,对称放着四个波纹管,其中,给定波纹管5和测量波纹管12为一组,负反馈波纹管11和正反馈波纹管4为另一组,两组波纹管同时作用在浮动环3上。浮动环既作为力矩的比较机构,又作为挡板,浮动环3上有一比例带调带杆13,作为浮动环偏转的支点。比例带调整杆固定在比例带调整杆轴上,可以沿该轴转动以改变支点的位置,调整比例带的大小。同时,在比例带调整杆轴上装有一个圆形板,用它固定比例带调节杆轴、喷嘴及比例带盘。另外调节器下面装有放大器、积分气室和针阀、微分气室和针阀,还有正、反作用切换板,等等。如果让微分阀和积分阀均有一定开度,即可实现比例积分微分作用。这时,若测量信号P5增大,浮动环偏转,挡板靠近喷嘴,调节器输出P出增大。在P出增大的瞬间来不及经微分阀向微分气室充气。而微分气室中的波纹管内压力会突然增大,使其伸长压缩微分气室,其压力略有增大送至负反馈波纹管11,由于P11增加量很小,它所产生的负反馈力矩,远远小于测量力矩,挡板会大大靠近喷嘴,调节器的输出P出会大大增大,这就是微分输出的过程。随着时间的增长,P出经微分阀不断向微分气室充气,使之送人反馈波纹管压力P11不断增大,其负反馈力矩不断增大,又会使挡板逐渐离开喷嘴,调节器的输出P出会不断下降,这是微分输出的消失过程,当微分气室中的压力,即负反馈波纹管压力P11=P出时,调节器达到一个暂时的平衡,这时P出就与偏差成比例。同时微分气室输出的压力信号经积分阀9,不断向积分气室10充气,其压力不断增加,正反馈波纹管4内的压力增大,又会使挡板靠近喷嘴,使P出又略有些增大,以此来消除静态偏差。这一附加的正反馈实现了积分作用。可见,开大积分阀,积分时间Ti小,积分作用强,关小积分阀,积分时间Ti长,积分作用弱。调整微分作用强弱是通过调整微分阀7的开度来实现的。开大微分阀,微分时间Td短,微分作用弱,关小微分阀,微分时间Td长,微分作用强。正、反作用切换是通过切换板6实现的。对于正作用式,波纹管5接测量信号,波纹管12接调定的给定值。这时,切换板6处于B位。若把切换板6转一个90°角至A位,则波纹管12接测量信号,波纹管5接调定的给定值,调节器就成为反作用式调节器。图3-4-2M58型气动调节器结构原理图1-放大器;2-喷嘴;3-浮动环;4-正反馈波纹管;5-测量波纹管(B)或给定波纹管(A);6-正、反作用切换板;7-微分阀;8-微分气室;9-积分阀;10-积分气室;11-负反馈波纹管;12-给定波纹管(B)或测量波纹管(A);13-比例带调整杆;14-比例带盘考点3NAKAKITA型黏度调节器是按位移平衡原理工作的。能实现PID控制作用,其结构原理如图3-4-4所示。在初始平衡状态下,燃油黏度测量值与给定值相等,黑色的测量指针与红色的给定指针重合。喷嘴挡板之间的开度不变,调节器有一个稳定的输出。比例波纹管、积分波纹管、积分气室及微分气室压力都相等,并等于调节器的输出压力。图3-4-4NAKAKITA型粘度调节器结构原理图当系统受到扰动时,燃油黏度的测量值会离开给定值出现偏差。假定燃油黏度增大,差压变送器输出一个与之成比例的增大的气压信号,并经控制板送人弹簧管,弹簧管张开,GH杆经FG杆推动向上移动。以E轴,HEN杆和HED杆均逆时针转动,它一方面使MN杆右移,使黑色测量指针绕轴Q′向指示黏度增大的方向转动;另一方面,由于D点右移,使AC杆绕C轴逆时针转动。BO′杆右移,OO′杆以O为支点顺时针转动,挡板离开喷嘴,喷嘴背压下降,经气动功率放大器使调节器输出压力降低(这是反作用式调节器)。这一降低的压力信号分四路。一路是送人气关式调节阀,开大蒸汽调节阀使燃油黏度降下来。二路是与微分气室中的波纹管相通,波纹管收缩,波纹管外面的气室压力略有降低,则比例波纹管的压力略有降低。OO′杆略有下移,使挡板稍微靠近一点喷嘴。这一负反馈很弱,不足以抵制挡板继续离开喷嘴,调节器的输出会大大降低,调节阀开度很大,这就是调节器的微分输出,三路是调节器的输出经微分阀与微分气室相通,微分气室压力经微分阀不断向压力降低的P出放气,其压力不断降低,比例波纹管的压力不断降低,OO′杆不断下移,负反馈作用不断加强,挡板不断靠近喷嘴,调节器的输出信号不断增大。这是微分输出的消失过程,当测量信号使挡板离开喷嘴位移量与负反馈信号使挡板靠近喷嘴的位移量相平衡时,微分输出就消失在比例输出上。可见,微分作用是由弹性气室组成的比例惯性环节的负反馈实现的。四路是积分波纹管的压力不断经积分阀放气而降低,OO′杆上移,使挡板又逐渐离开一点喷嘴,这一附加的正反馈使调节器输出P出压力有所降低,再略开大一点蒸汽调节阀,用来消除静态偏差使燃油黏度恢复到给定值,最终黑、红指针再次重合。在调节器上有三个调整盘,分别用来调整比例带、积分时间和微分时间,改变积分阀和微分阀的开度可分别调整积分时间和微分时间,开大积分阀,关小微分阀,可缩短积分时间,增加微分时间,其积分作用和微分作用都加强,反之亦然。比例带调整盘是一个偏心机构,转动比例带调整盘可平行移动喷嘴挡板机构,这样挡板转动相同的角度,则喷嘴与挡板之间的开度变化量不同。调整给定值是通过转动给定值旋钮实现的。若增大给定值,可顺时针转动给定值旋钮。一方面红色指针向给定值增大的方向转动;另一方面,QS杆将绕Q轴逆时针转动,RC杆左移。这时由于黏度的测量值暂时未变,A和D点不动,故BO′杆左移,挡板靠近喷嘴,调节器输出压力增大,这与黏度低于给定值的效果是一样的,经调节器PID的控制作用,关小蒸汽调节阀使燃油黏度逐渐升高并最终稳定在新的给定值上,即黑色测量指针不断向黏度增大方向转动,最后与红色给定指针重合。考点41.经验法经验法又叫现场凑试法,即先确定一个调节器的参数值PB和Ti通过改变给定值对控制系统施加一个扰动,现场观察判断控制曲线形状。若曲线不够理想,可改变PB或Ti,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。如果调节器是PID三作用式的,那么要在整定好PB和Ti的基础上加进微分作用。由于微分作用有抵制偏差变化的能力,所以确定一个Td,值后,可把整定好的PB和Ti值减小一点再进行现场凑时,直到PB、Ti和Td取得最佳值为止。显然用经验法整定的参数试,直到PB、Ti和Td取得最佳值为止。显然用经验法整定的参数是准确的。但花时间较多。2.衰减曲线法衰减曲线法是以4∶1的衰减比作为整定要求的,先切除调节器的积分和微发作用,用凑试法整定纯比例控制作用的比例带PB(比同时凑试两个或三个参数要简单得多),使之符合4∶1衰减比的要求,记下此时的比例带PBS,和振荡周期Ts。如果加进积分和微分作用,可按表3-4-1给出的经验公式进行计算。若按这种方式整定的参数在运行过程中,其动态过程曲线还不够理想,再根据曲线形状,对整定的参数作适当的调整。对有些控制对象,控制过程进行较快,难以从记录曲线上找出衰减比。这时,只要被控量波动2次就能达到稳定状态,可近似认为是4∶1的衰减过程,其波动一次时间即为Ts。表3-4-1衰减曲线法经验公式表3.临界比例带法用临界比例带法整定调节器参数时,先要切除积分和微分作用,让控制系统以较大的比例带,在纯比例控制作用下运行,然后逐渐减小PB,每减小一次都要认真观察过程曲线,直到达到等幅振荡时,记下此时的比例带PBK;(称为临界比例带)和波动周期TK,然后按表3-4-2给出的经验公式求出调节器的参数值:按该表算出的参数值后,要把比例带放在比计算值稍大一点的值上,把Ti和Td放在计算值上,进行现场运行观察,如果比例带可以减小,再将PB放在计算值上。表3-4-2临界比例带法经验公式表这种方法简单,应用比较广泛。但对PBK很小的控制系统不适用,对被控参数不允许震荡的系统也不适用。4.反应曲线法前三种整定调节器参数的方法,都是在预先不知道控制对象特性的情况下进行的。如果知
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 naughtry
naughtry
本文标题:第三章 船用气动仪表 第四节 气动调节器163
链接地址:https://www.777doc.com/doc-3130806 .html