您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 工业机器人2(2013~2014学年-1)
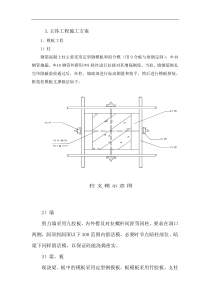
1、主讲:马志艳湖北工业大学第二章工业机器人机械系统设计2.1工业机器人总体设计2.2驱动机构2.3机身和臂部设计2.4腕部设计2.5手部设计2.6行走机构设计2.1工业机器人总体设计一、系统分析采用工业机器人需要先进行综合的技术和经济分析,一旦确定采用,设计人员在开始技术设计之前应进行如下工作:1.根据使用场合,确定机器人的目的和任务;2.分析机器人所在系统的工作环境,包括机器人与已有设备的兼容性;3.分析系统的工作要求,确定机器人的基本功能和方案,准备做技术设计;4.进行必要的调查研究,搜集国内外的有关资料,进行综合分析,找出可供借鉴之处,以及别人的经验教训;2.1工业机器人总体设计二、技术设计1.确定机器人的基本参数(自由度数目、工作范围、承载能力、运动速度、定位精度等);2.确定机器人的运动形式(五种基本结构);3.拟定传感系统框图;4.确定控制系统总体方案;5.机械结构设计(驱动方式、机器人总装图、主要零部件图)6.平衡系统设计6.1工业机器人平衡系统的作用:质量平衡技术;弹簧力平衡技术;可控力平衡技术;6.2平横系统设计的主要途径:安全;降低因各种因素而导致关节驱动。
2、力矩变化的峰值;借助平衡系统,改进机器人的动力特性;减小结构柔性所引起的不良影响;使机器人运行平稳。2.1工业机器人总体设计二、技术设计2.1工业机器人总体设计二、技术设计6.3质量平衡技术实例—平行四边形平衡机构23LL、如图所示,和分别代表下臂和上臂的长度和质心,和分别代表它们的质量和转角。m为可移动的平衡质量,它用来平衡下臂和上臂的质量,杆SA、AB与上臂下臂铰接构成一个平行四边形平衡系统。经过推导,只要满足下面两个方程式,平行四边形机构就可以取得平衡,即。23GG、23mm、23、20Mo3332223232mOGSCmmOGmOOOCm左式说明:平衡与否只与可移动平衡质量m的大小和位置有关,与无关,这说明该平衡系统在机械臂的任何位姿下都是平衡的。23、第二章工业机器人机械系统设计2.1工业机器人总体设计2.2驱动机构2.3机身和臂部设计2.4腕部设计2.5手部设计2.6行走机构设计2.2驱动机构一、各种驱动方式的优缺点优点:㈠液压驱动体积小,可以获得较大的推力和转矩;介质的可压缩性小,系统工作稳定可靠,精度高;容易实现对力、速度、方。
3、向的自动控制;油液介质使系统具有防锈蚀和自润滑性能;缺点:油液的黏度受温度影响,影响工作性能;液体泄漏难以克服,要求液压元件制造精度高;需要提供相应的供油系统和严格的滤油装置;2.2驱动机构一、各种驱动方式的优缺点优点:㈡气压驱动压缩空气黏度小,容易达到高速(1m/s);工厂一般都自有空气压缩机站,可提供压缩空气,不必再额外的添加动力设备,而且空气介质对环境无污染,使用安全;气动元件工作压力低,因此制造要求也低一些,价格低廉;空气具有压缩性,是系统能够实现过载自动保护;缺点:压缩空气一般为0.4~0.6Mpa,要想获得较大的压力,结构就要增大;空气具有压缩性,工作平稳性差,速度控制困难,要实现准确的位置控制更困难;压缩空气排水比较麻烦;排气造成噪音污染;2.2驱动机构一、各种驱动方式的优缺点㈢电气驱动1.步进电机:多为开环控制,简单,功率较小,多用于低精度、小功率的机器人;2.直流伺服电机:易于控制,有较理想的机械特性,但其电刷易磨损,易形成火花;3.交流伺服电机:结构简单,运行可靠,可以频繁的启动、制动;交流伺服电机和直流伺服电机相比:没有电刷等易磨损部件,外。
4、形尺寸小,能在重载下高速运行,加速性能好,能实现动态控制和平滑运动,但控制较复杂;2.2驱动机构二、各种传动机构1、齿轮齿条:旋转运动变为直线运动2.2驱动机构二、各种传动机构2、普通丝杆(丝杠螺母副)及滚珠丝杠传动丝杠螺母副传动部件是把回转运动变换为直线运动的重要部件。由于丝杠螺母机构是连续的面接触,传动中不会产生冲击,传动平稳,无噪声,并且能自锁;由于丝杠的螺旋升角交小,所以用较小的驱动力矩,也可以获得较大的牵引力。丝杠螺母的螺旋面之间的摩擦是滑动摩擦,所以传动效率较低。丝杠螺母副的改进:滚珠丝杠传动效率高,而且传动精度和定位精度都很高,在传动时灵敏度和平稳性也很好;由于滚珠丝杠的磨损小,其使用寿命比较长。丝杠、螺母的材料、热处理和加工工艺要求很高,故成本较高。2.2驱动机构二、各种传动机构3、谐波传动一般电机是高转速、低力矩的驱动器,在机器人中要用减速器变成低转速、高力矩的驱动器。机器人对减速器的要求如下:在工业机器人中,比较合乎要求且常用的减速器是行星齿轮机构和谐波传动机构,谐波传动在运动学上是一种具有柔性齿圈的行星传动。运动精度高,间隙小,以实现较高的重复定位精。
5、度;回转速度稳定,无波动,运动副间摩擦小,效率高;体积小,重量轻,传动扭矩大;2.2驱动机构3、谐波传动特点:传动尺寸小,惯量低;一级传动比大,结构紧凑;载荷分布在若干个行星轮上,内齿轮也具有较高的承载能力。尺寸小、惯量低;由于误差分布在多个啮合齿上,传动精度高;由于预载啮合,传动间隙非常小;由于是多齿啮合,传动具有高阻尼特性;优点:柔轮的疲劳问题;扭转刚度低;以输入轴速度2,4,6倍的啮合频率产生振动;谐波传动比行星传动具有更小的传动间隙,更轻的质量,但是刚度比行星传动差;缺点:2.2驱动机构4、其他传动工业机器人中常用的传动除了谐波传动和丝杠传动之外,还有几种常用的传动机构:活塞缸和齿轮齿条机构:齿轮齿条机构是通过齿条的往复移动,带动与手臂连接的齿轮旋转,实现手臂的转动,带动齿条往复移动的活塞缸一般由压力油或压缩空气驱动。链传动、皮带传动、绳传动钢带传动:二、各种传动机构2.2驱动机构三、传动件的定位及消隙工业机器人的重复定位精度要求较高,设计时应根据具体要求选择合适的定位方法。目前常用的定位方法有电气开关定位、机械档块定位和伺服定位。㈠传动件的定位1.电。
6、气开关定位:利用电气开关(有触点或无触点)作行程检测元件,当机械手运行到定位点时,行程开关发出信号,切断动力源或接通制动器,从而使机械手获得定位。电气开关定位的特点:结构简单、工作可靠、维修方便,但由于受到惯性力等因素的影响,重复定位精度比较低,一般为±3~5mm。2.2驱动机构三、传动件的定位及消隙工业机器人的重复定位精度要求较高,设计时应根据具体要求选择合适的定位方法。目前常用的定位方法有电气开关定位、机械档块定位和伺服定位。㈠传动件的定位2.机械挡块定位:在行程终点设置机械挡块,当机械手减速运动到终点时,紧靠挡块而定位。如果定位前缓冲较好,定位时驱动压力为撤除,在驱动压力下将运动件压在机械挡块上,此时能得到较高的定位精度,最高可达±0.02mm。2.2驱动机构三、传动件的定位及消隙工业机器人的重复定位精度要求较高,设计时应根据具体要求选择合适的定位方法。目前常用的定位方法有电气开关定位、机械档块定位和伺服定位。㈠传动件的定位3.伺服定位:电气开关定位和机械挡块定位这两种定位方法只适用于两点定位或多点定位,要实现任意点定位,就要使用伺服定位。开环伺服定位系统闭环伺服定位2.2驱动机。
7、构三、传动件的定位及消隙一般机械传动机构存在间隙,这影响了机器人的重复定位精度和平稳性。传动间隙的存在是不可避免的,其产生的主要原因有:由于制造和装配误差所产生的间隙、为适应热膨胀而特意留出的间隙。消除传动间隙的主要途径有:提高制造和装配精度、设计可调整传动间隙的机构、设置弹性补偿零件。㈡传动件的消隙工业机器人常用的几种消除传动间隙的方法:消隙齿轮、柔性齿轮消隙、对称传动消隙、偏心机构消隙、齿廓弹性覆层消隙。2.2驱动机构三、传动件的定位及消隙㈡传动件的消隙齿廓弹性覆层消隙消隙齿轮第二章工业机器人机械系统设计2.1工业机器人总体设计2.2驱动机构2.3机身和臂部设计2.4腕部设计2.5手部设计2.6行走机构设计2.3机身与臂部设计一、机身设计工业机器人的机身也称立柱,机器人必须有一个便于安装的基础部件,这就是机器人的机座,机座往往与机身做成一体。机身是支承臂部的部件,常有1~3个自由度。机身设计要注意以下问题:要有足够的刚度和稳定性;运动要灵活,升降运动的导套长度不宜过短,避免发生卡死现象,一般要有导向装置;结构布置要合理;通常工业机器人的机身具有具有回转、升降、回转与升降、回转。
8、与俯仰、回转与升降及俯仰等5种运动方式,采用哪一种方式由工业机器人的总体设计来确定。一、机身设计回转运动采用摆动油缸驱动,升降油缸在下,回转油缸在上。因摆动油缸安装在升降活塞杆的上方,因此活塞杆的尺寸要加大;1.回转与升降机身回转运动采用摆动油缸驱动,回转油缸在下,升降油缸在上。相比之下,回转油缸的驱动力矩要设计得大一些;链轮传动机构;2.3机身与臂部设计一、机身设计俯仰运动一般采用活塞缸与连杆机构来实现。2.回转与俯仰机身2.3机身与臂部设计一、机身设计3.机身驱动力(力矩)的计算①垂直升降运动的驱动力的计算:作垂直运动时,除克服摩擦力之外,还要克服机身自身运动部件的重力和其承受的手臂、手腕、手部、工件等总重力以及升降运动的全部部件的惯性力,因此其驱动力的计算如下:qPmFqmgPFFW其中:-各支承处的摩擦力;-启动时的总惯性力;-运动部件的总重力;-上升时为正,下降时为负。mFgFW2.3机身与臂部设计一、机身设计3.机身驱动力(力矩)的计算②回转运动的驱动力矩的计算:作回转运动时,驱动力矩只包括两项:回转部件的摩擦总力矩;机身自身运动部件和其携带的手臂、手腕、手部。
9、、工件等总惯性力矩,因此,其驱动力矩计算方法为:qMqmgMMM其中:0gMJt2.3机身与臂部设计mMgM一、机身设计3.机身驱动力(力矩)的计算③升降立柱下降过程不卡死的条件计算:偏重力矩是指臂部全部零部件与工件的总重量对机身立柱轴的静力矩。当手臂在最大行程位置时,偏重力矩最大,因此,偏重力矩按悬伸最大行程,最大抓重时进行计算。iiiGLLG偏重力臂:偏重力矩:MGL2.3机身与臂部设计一、机身设计3.机身驱动力(力矩)的计算③升降立柱下降过程不卡死的条件计算:手臂在总重量G的作用下,产生偏重力矩,导致立柱倾斜。如果偏重力矩过大,并且导套设计不合理(导套长度不够),立柱在导套中有卡住现象,这时,机身的升降驱动力必须增大,相应驱动及传动装置结构就庞大。如果机身下降靠重力的话,则可能立柱被卡死在导套内而不能作下降运动,这就是自锁。因此必须根据偏重力矩的大小决定立柱导套的长度。2.3机身与臂部设计一、机身设计3.机身驱动力(力矩)的计算③升降立柱下降过程不卡死的条件计算:根据立柱平衡条件可知:1NFhGL因此:21NNLFFGh要使立柱在导套内自由下降,则臂部总。
10、重量必须大于导套与立柱之间的摩擦力,这就是升降立柱靠自重下降而不卡死的条件为:12122mmNLGFFFfGfh即:2hfL2.3机身与臂部设计一、臂部设计的基本要求臂部的结构形式需根据机器人的运动形式、抓取重量、动作自由度、运动精度等因素来确定。同时还要考虑臂部的受力情况、油(气)缸及导向装置的布置、内部管路与手腕的连接形式等因素。刚度要求高:为防止臂部在运动过程中产生过大的变形,手臂的截面形状必须合理选择。常采用工字钢、空心管。导向性要好:为防止手臂在直线运动中,沿运动轴线发生相当转动,需要设置导向装置。重量要轻:为提高机器人的运动速度,要尽量减轻臂部运动部分的重量,以减小整个臂部对回转轴的转动惯量。运动要平稳、定位精度要高:由于臂部运动速度越高,惯性力引起定位前的冲击也就越大,导致运动不平稳,定位精度也不高。此时需要采用一定形式的缓冲措施。2.3机身与臂部设计二、臂部的常用结构1.手臂直线运动机构:实现手臂直线运动的机构形式很多,常用的有活塞油(气)缸、齿轮齿条机构、丝杠螺母机构、连杆机构等。由于活塞油(气)缸的体积小,重量轻,因而在机器人的手臂结构中应用得比较多。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 sd153624
sd153624
本文标题:工业机器人2(2013~2014学年-1)
链接地址:https://www.777doc.com/doc-3143269 .html