您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 工程监理 > PID参数整定实验--李维涛
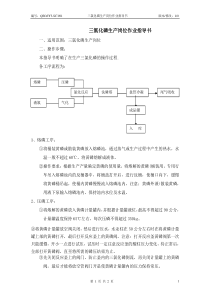
PID参数整定实验在过程控制中,PID控制器(PID调节器)一直是应用最为广泛的一种自动控制器。在模拟过程控制中,PID控制算式为:u(t)=Kp{)1()()()(0neneTTdieTiTneni}+u0几个重要PID参数对系统控制过程的影响趋势:①增大比例系数P一般将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。②增大积分时间I有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。③增大微分时间D有利于加快系统的响应速度,使系统超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。一般PID整定方法有以下几种:一.实验试凑法所谓实验凑试法是通过闭环运行或模拟,观察系统的响应曲线,然后根据各参数对系统的影响,反复凑试参数,直至出现满意的响应,从而确定PID控制参数。试凑法是工程控制中常用且重要的方法。在凑试时,可参考以上参数对系统控制过程的影响趋势,对参数调整实行先比例、后积分,再微分的整定步骤。(1)整定比例控制将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。(2)整定积分环节若在比例控制下稳态误差不能满足要求,需加入积分控制。先将步骤(1)中选择的比例系数减小为原来的50~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑至得到较满意的响应,确定比例和积分的参数。(3)整定微分环节若经过步骤(2),PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制,构成PID控制。先置微分时间Td=0,逐渐加大Td,同时相应地改变比例系数和积分时间,反复试凑至获得满意的控制效果和PID控制参数。二.Z—N法Z-N法又叫做临界比例度法,是目前使用较广的一种整定参数方法。实验步骤:1)把调节器的积分环节和微分环节断开,比例度置较大数值,把系统投入闭环运行,然后将调节器比例度Kp由大逐渐减小,得到临界振荡过程。这时候的比例度叫做临界比例度Kpcnt,振荡的两个波峰之间的时间即为临界振荡周期Tn.2)根据Kpcnt和Tn的值,运用表1中的经验公式,计算出调节器各个参数Kp、Ti和Td的值。3)根据计算结果设置调节器的参数值。运行之后,即可得到响应曲线。控制器KpTiTdP0.5Kpcnt--------PI0.45Kpcnt0.85Tn----PID0.6Kpcnt0.5Tn0.12Tn表1三.C—C法C-C法也叫做动态特性参数法,就是根据系统开环广义过程(包括Wv(s).被控对象Wo(s)和测量变送Wm(s)阶跃响应特性进行近似计算的方法在调节阀Wv(s)的输入端加一阶跃信号,记录测量变送器Wm(s)的输出响应曲线,根据该曲线求出代表广义过程的动态特性参数(τ----过程的滞后时间,T----过程的时间常数,K----平衡终值)。然后根据这些参数的数值,分别应用表2相应公式计算出调节器的整定参数值控制器KpTiTdPT0/2(K0τ)--------PI0.9T0/2(K0τ)3τ----PID1.2T0/2(K0τ)2τ0.5τ表2下面以一阶(Gps=131S)、二阶(Gps=1211SS)和三阶(Gps=131S)控制对象说明,分别在P、PI和PID三种控制器作用下的不同。1.P控制器⑴.控制对象为Gps=131S时:①.试凑法根据上文讲到的由小到大,两边夹近的方法确定Kp=2.9。②.Z—N法由上文所讲方法,断开微分积分环节,调节比例度Kpcnt=5.39346,使其得到如图1所示响应曲线:051015202530-0.200.20.40.60.811.21.41.61.8ty(t)图1求得Tn=3.65。由表1经验式可得Kp=3.24。③.C—C法由于是一阶控制对象,直接可知,K0=1,T0=3,τ=1。由表2经验式并微调可得Kp=3。以上三种方法所得曲线,如图2所示:05101520253000.20.40.60.811.21.4ty(t)图2⑵.控制对象为Gps=1211SS时:①.试凑法根据上文的方法,逐步试凑,得到可观曲线。此时Kp=1.6。②.Z—N法同理上文,调节比例控制器,使曲线达到等幅震荡,如图3所示,此时Kpcnt=3.7656。Z—N法试凑法C—C法0102030405060708090100-0.200.20.40.60.811.21.41.61.8ty(t).图3由图求得Tn=5.55。根据表1经验式,可得Kp=1.88。③.C—C法由上述所讲,给控制对象加一单位阶跃信号,示波器中显示曲线如图4所示:0246810121416182000.10.20.30.40.50.60.70.80.91ty(t)图4由图求得τ=1.5T0=4.2K0=1.根据表2经验式可知Kp=1.4。以上三种方法所得曲线如图5所示:010203040506070809010000.10.20.30.40.50.60.70.80.91ty(t)图5⑶.控制对象为Gps=131S时:①.试凑法同上所述,得到Kp=1.1②.Z--N法同上所述,得到等幅震荡曲线如图6所示,此时Kpcnt=2.4978。0102030405060708090100-0.200.20.40.60.811.21.41.6ty(t)Z—N法试凑法C—C法图6由上图求得Tn=6.87。根据表1经验式可知Kp=1.2。③.C—C法同上所述在示波器中得到单位阶跃信号如图7所示01234567891000.10.20.30.40.50.60.70.80.91ty(t)图7由上图求得τ=1.73Tn=3.798K0=1,由表2经验式可知,Kp=1.09。以上三种方法所得曲线如图8所示:010203040506070809010000.10.20.30.40.50.60.70.8ty(t)Z—N法试凑法C—C法图82.PI控制器⑴.被控对象为Gps=131S时:①.试凑法如前所述,改变比例和积分环节,可以影响曲线的超调量,Kp和Ti作用相反。试凑可得,Kp=2.1,Ti=3.7。②.Z—N法根据⑴中的数据,由表1经验式可得,Kp=2.5,Ti=4.6。③.C—C法根据⑴中的数据,由表2检验式可得,Kp=1.4,Ti=3。以上三种方法所得曲线如图9所示:05101520253000.20.40.60.811.21.4ty(t)图9⑵.被控对象为Gps=1211SS时:Z—N法试凑法C—C法①.试凑法如前所述,经试凑得,Kp=1.5,Ti=4.3。②.Z—N法如前所述,根据⑴中所得数据,由表1经验式可得,Kp=1.7,Ti=4.7。③.C—C法如前所述,根据⑴中所得数据,由表2经验式可得,Kp=1.3,Ti=4.5。以上三种方法所得曲线如图10所示:0510152025303540455000.20.40.60.811.21.4ty(t)图10⑶.被控对象为Gps=131S时:①.试凑法如前所述,经试凑可得,Kp=1.2,Ti=5。②.Z—N法如前所述,根据⑴中所得数据,由表1经验式可得,Z—N法试凑法C—C法Kp=1.4,Ti=5.86。③.C—C法如前所述,根据⑴中所得数据,由表2经验式可得,Kp=1.15,Ti=5.2。以上三种方法所得曲线如图11所示:010203040506000.20.40.60.811.21.4ty(t)图113.PID控制器⑴.控制对象为Gps=131S时:①.试凑法如前所述,试凑可得,Kp=3.2,Ti=3.5,Td=0.2。②.Z—N法根据⑴中的数据,由表1经验式并稍做修改可得,Kp=3.24,Ti=2.8,Td=0.2。Z—N法试凑法C—C法③.C—C法根据⑴中的数据,由表2检验式并稍做修改可得,Kp=3.6,Ti=3.5,Td=0.3。以上三种方法所得曲线如图12所示:05101520253000.511.5ty(t)图12⑵.被控对象为Gps=1211SS时:①.试凑法如前所述,经试凑得,Kp=2.1,Ti=2.7,Td=0.6。②.Z—N法如前所述,根据⑴中所得数据,由表1经验式并稍做修改可得,Kp=2.26,Ti=2.8,Td=0.6。③.C—C法如前所述,根据⑴中所得数据,由表2经验式并稍做修改可得,Kp=1.9,Ti=2.7,Td=0.6。Z—N法C—C法试凑法以上三种方法所得曲线如图13所示:05101520253000.511.5ty(t)图13⑶.被控对象为Gps=131S时:①.试凑法如前所述,经试凑可得,Kp=1.1,Ti=2.5,Td=0.6。②.Z—N法如前所述,根据⑴中所得数据,由表1经验式可得,Kp=1.5,Ti=3.4,Td=0.82。③.C—C法如前所述,根据⑴中所得数据,由表2经验式可得,Kp=1.32,Ti=5.2,Td=0.865。以上三种方法所得曲线如图14所示:Z—N法试凑法C—C法05101520253000.20.40.60.811.21.4ty(t)图14总结:反应曲线法是通过系统开环试验,得到被控过程的典型特征参数之后,再对调节器参数进行整定。因此,这种方法适应性较广,通用性较强。临界比例度法是闭环试验整定方法。依赖系统在某种运行状态下特性信息对调节器参数进行整定,其优点是无需掌握被控对象的数学模型。缺点是对生产过程不能反复做振荡试验。Z-N法得到的响应曲线超调量比较大,但是反应时间快,调整时间短;C-C法得到的响应曲线超调量比较小,反应较慢;试凑法相对比较适中,但是,试凑过程比较繁琐,而另外两种方法通过经验公式计算,可较快得出参数。Z—N法试凑法C—C法
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 海龟晒太阳
海龟晒太阳
本文标题:PID参数整定实验--李维涛
链接地址:https://www.777doc.com/doc-3160700 .html