您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 人事档案/员工关系 > GCY-300限界计算
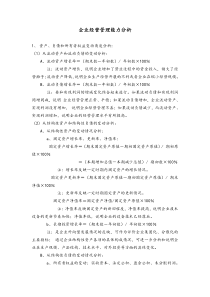
1动态包络线计算——GCY-300调车机1、参数及外轮廓1.主要结构参数和悬挂系统的主要参数如表1所示:(表1机车的主要结构参数表)序号符号说明取值单位数据来源1l最大轨距1441mm线路参数2d轮缘名义最小外侧距1399mm车辆参数3(2n+a)/a1.6707317074n计算断面至相邻中心销距离2752mm车辆参数5a车辆定距8200mm车辆参数6△q1轴箱轴承游隙1.5mm车辆参数7△q2车轮横向弹性变形0mm车辆参数8△q3一系弹簧横向弹性变形(静态+动态)4mm车辆参数9△w1中心销径向间隙及磨损1mm车辆参数10△w2二系弹簧横向变形——静态0mm车辆参数11△w3二系弹簧横向变形——动态15mm车辆参数12△e轨道横向弹性变形1mm车辆参数13△hc2两条钢轨相对高度的弹性变化1mm车辆参数14S重力倾角附加系数8.84222E-0515g重力加速度9.8m/s216hsc车体重心距轨面高1683mm车辆参数17mz载荷不对称的计算重量0kg车辆参数18hcp一系弹簧上支撑面距轨面高472mm车辆参数19hcs二系弹簧上支撑面距轨面高1250mm车辆参数220kφp整车一系弹簧侧滚刚度6504091200N.mm/rad21np车辆一侧一系弹簧并列数8车辆参数22Cp每一轴箱一系弹簧垂直刚度425N/mm车辆参数23bp一系弹簧间距1956mm车辆参数24kφs整车二系弹簧侧滚刚度21861402304N.mm/rad25ns车辆一侧二系弹簧并列数4车辆参数26Cs转向架二系弹簧垂直刚度2857N/mm车辆参数27bs二系弹簧间距1956mm车辆参数28kφn进制抗侧滚扭杆的抗侧滚刚度2000N.mm/rad29△d轮对制造误差1mm车辆参数30△Mt1中心销安装定位误差1mm车辆参数31△Mt2一系弹簧横向定位误差2mm车辆参数32△Mt3车体横向制造误差2mm车辆参数33△Mt4车体表面设备安装误差3mm车辆参数34△Mt5受电弓横向安装误差值3mm车辆参数35△Shd受电弓相对车体横向晃动2mm车辆参数36△c线路中心线横向位差10mm线路参数37△Xbq车体倾斜量5mm车辆参数38Hcq车体侧墙高度2150mm车辆参数39hsj车底架边缘梁距轨面高1062mm车辆参数40△Hc1两条钢轨的相对高度误差2mm线路参数341Aw*Pw风对车体作用力17015.625N42Aw车体受风面积m224.5m2车辆参数43Pw风作用压强n/m2694.5153061n/m2起重机设计手册24页44Ch7.32425E-1345Ch'6.60055E-1346hsw车体受风面积形心距轨面高1800mm47mb车体重43.8kg车辆参数48ab横向加速度0.98m/s2车辆参数49△Mt6车辆地板面未能补偿的高度误差3mm车辆参数50△Mt8车体上部及安装设备高度尺寸制造安装误差3mm车辆参数51△fp一系垂向动绕度25mm车辆参数52△fs二系垂向动绕度2mm车辆参数53δc线路中心线垂向位差2mm线路参数54(hsw-hcp)/kφp2.04179E-0755(hsw-hcs)/kφs2.51585E-0856(hsc-hcp)/kφp1.86191E-0757(hsc-hcs)/kφs1.98066E-0858△Mt9车体销外上翘、下垂量0mm车辆参数59f'01车轮垂向弹性变形(刚性车轮)10mm车辆参数60f01一系弹簧垂向永久变形0mm车辆参数61f1一系弹簧空重车绕度变化0mm车辆参数462f2二系弹簧空重车绕度变化0mm车辆参数63f02二系弹簧垂向永久变形0mm车辆参数64δe轨道垂向弹性变形2mm线路参数65δw0轨道垂向磨耗10mm线路参数66δw1车轮最大旋削量27mm车辆参数67δ'w1两次旋轮间踏面磨耗2mm车辆参数68△Mt7车体下部及吊挂物高度尺寸制造安装误差3mm车辆参数69(l-d)/22170△Mt10构架横向制造误差2mm车辆参数71△Mt11构架向上垂向制造误差4mm车辆参数72△Mt12构架向下垂向制造误差4mm车辆参数73(2p+m)/pp-转向架固定轴距,m-计算断面至相邻轴距离2.674P转向架固定轴距2000mm车辆参数75m计算断面至相邻轴距离1200mm车辆参数76△Mt13簧下部分横向制造误差1.5mm车辆参数77△Mt14簧下部分垂向制造误差0.5mm车辆参数2、轮廓外形52.总体设计外形见图1。(图1外形图)3、限界计算断面3.1限界校核的计算断面条件基本轮廓线以车长14642mm,中心销定距8200mm,端部计算端面相邻中心销2752mm为计算条件。转向架部分轮廓取转向架上最外侧三点校核。3.2校核计算的轮廓控制线坐标整车基本轮廓线控制点坐标:车辆轮廓控制点0123456789X07341196128013321332128012301130950Y37513522319029421568936682292142117转向架突出车体部分轮廓线控制点坐标:转向架部分轮廓控制点1z2z3zX127912961164Y9258663274、动态包络线计算4.1术语:●基准坐标系6基准坐标系是垂直于直线轨道线路中心线的二维直角平面坐标。改基准坐标系的坐标系的坐标原点为轨距中心点,横向坐标轴(X轴)与设计轨顶平面相切,竖向坐标轴(Y轴)垂直轨顶平面。●动态包络线车辆不论是空车或重车在平直线的轨道上按规定速度运行,计算了车辆和轨道的公差、磨耗、弹性变形、车辆的各种振动和滚动等正常状态下运行的各种限定因素,而产生的车辆各部位竖向和横向动态偏移后的统计轨迹,以基准坐标系表示称为动态包络线。●动态偏移及偏移量在基准坐标系内,以计算轮廓线上各坐标点为基准点,因车辆和轨道的公差、磨耗、弹性变形、车辆各种振动及滚动等原因,使在运行中偏离上述定义的基准点位置的现象称为动态偏移。在横向坐标方向的偏移称为横向偏移,在竖向坐标方向的偏移称为竖向(或向上、向下)偏移。上偏移的量值为偏移量(以mm计)。4.2动态包络线计算方法4.2.1计算方法原则4.2.1对于动态包络线计算中所考虑的要素(见下节4.2.2),按其性质统一分成两大类,即随机因素(Z)和非随机因素(NZ),对于非随机因素按线性相加合成,而对随机且按高斯概率分布的因素采取平方和开根的合成办法进行。将两大类相加形成车辆的动态偏移量。4.2.2动态包络线计算考虑的要素71)车辆的制造误差;2)车辆的维修限度;3)转向架轮对处于轨道上的最不利运行位置;4)轮对相对于构架的横向位移量;5)转向架构架相对于车体的横向位移量;6)车辆的空重车挠度差及垂向位移量;7)轨道线路的几何偏差(含维修限度);8)一系悬挂侧滚位移量;9)二系悬挂侧滚位移量;10)因车辆制造、载荷不对称、轨道水平不平顺等引起的偏斜。本计算书动态包络线计算所涉及要素符号,说明及取值列于表1。4.2.3动态包络线计算公式动态包络线由计算轮廓线各点坐标加横向及垂向车辆偏移量得到。偏移量的计算如下:a.车体部分1)车体横向平移和车体倾角产生的横向偏移方向相同时:●车体横向:车辆轮廓控制点123456△Xbp77.777.477.176.875.575.1车辆轮廓控制点78910△Xbp74.974.774.774.6计算公式如下图:8●车体竖向向上偏移量车辆轮廓控制点123456△Ybpu42.138.235.735.234.934.9车辆轮廓控制点78910△Ybpu35.235.536.137.0计算公式如下图:●车体竖向向下偏移量车辆轮廓控制点123456△Ybpd91.192.494.194.494.694.6车辆轮廓控制点78910△Ybpd94.494.293.893.1计算公式如下图:92)车体横向平移和车体倾角产生的横向偏移方向相反时:●车体横向偏移量计算:车辆轮廓控制点123456△Xbp64.064.865.966.771.172.6车辆轮廓控制点78910△Xbp72.872.572.372.2计算公式如下图:●车体竖向向上偏移量:车辆轮廓控制点123456△Ybpu42.242.843.443.543.543.5车辆轮廓控制点78910△Ybpu43.543.443.343.0计算公式如下图:10●车体竖向向下偏移量:车辆轮廓控制点123456△Ybpd91.287.284.784.384.084.0车辆轮廓控制点78910△Ybpd84.384.585.186.0计算公式如下图:b.转向架部分1)构架(a)横向移动与倾角产生的横向偏移方向相同:●构架横向偏移量的计算如下:转向架部分轮廓控制点1z2z3z△Xt82.081.981.4计算公式如下图:11●构架竖向向上偏移量计算:(竖向平移和倾角产生的竖向偏移方向相反)转向架部分轮廓控制点1z2z3z△Ytu59.559.560.0计算公式如下:●构架竖向向下偏移量计算(竖向平移和倾角产生的竖向偏移方向相同),计算公式如下图。转向架部分轮廓控制点1z2z3z△Ytd115.2115.2115.112(b)横向移动与倾角产生的横向偏移方向相反时:●构架横向偏移量的计算如下:转向架部分轮廓控制点1z2z3z△Xt77.677.879.3计算公式如下:●构架竖向向上偏移量计算:(竖向平移和倾角产生的竖向偏移方向相同)转向架部分轮廓控制点1z2z3z△Ytu66.266.266.1计算公式如下:13●构架竖向向下偏移量计算(竖向平移和倾角产生的竖向偏移方向相反)转向架部分轮廓控制点1z2z3z△Ytd108.5108.5109.0计算公式如下:2)簧下部件转向架簧下控制点1z2z3zX0859896Y105164166转向架簧下控制点1z2z3z△Xw(簧下部分横向偏移量32.232.232.214△Ywd(簧下部分竖向偏移量)51.151.952.0计算公式如下:簧下部分横向偏移量计算公式:簧下部分竖向偏移量计算公式:因此,簧下部分均未超过车体,且其横向偏移均小于车体横向偏移,固不会超出限界。3)轮缘部分竖向偏移量:△Yf16.7轮缘部分竖向偏移量计算公式:4)踏面部分竖向偏移量:△Ym14.7c、在平直线上的动态包络线计算:15根据表1的计算参数和上节提到的计算方法,通过计算得到轮廓线控制点的相应动态包络线坐标如下表:X77.7811.51273.11356.81407.61407.21355.01304.81204.71024.7Y(向上)3793.23564.83233.42985.51611.5979.5725.5335.4185.3160.0Y(向下)3659.83429.53095.92847.51473.3841.3587.5197.748.223.8根据表1的计算参数和上节提到的计算方法,通过计算得到转向架部分轮廓线控制点坐标,如下表:X1361.01377.91245.4Y(向上991.2932.2393.1Y(向下809.8750.8211.95、结论:结论:按照CJJ96-2003的限界标准,计算GCY-300调车机的动态包络线,计算了其最大危险位置,车辆中部的横向偏移,竖向偏移。车体的最大轮廓尺寸(取点10个)加上各偏移量之后,与B2限界比较,未超出限界。转向架部分(取点3个)根据计算未超出B2限界。计算了簧下部分的偏移量,由于簧下部分尺寸均未超过车体,且其横向偏移均小于车体横向偏移,故不会超出限界。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


![汽车专业毕业论文范文[1]](/doc-299158.png)

 88261523
88261523
本文标题:GCY-300限界计算
链接地址:https://www.777doc.com/doc-3235784 .html