您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 咨询培训 > 安川伺服驱动器增益设置方法
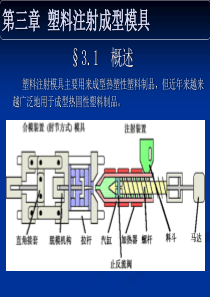
YASKAWA1.前言伺服调整的基本是配合机械特性进行滤波器的设定以及针对此滤波器的设定提高增益直至控制达到稳定状态。因此,多少也需要掌握有关机械方面的知识和控制方面的知识。只有单方面的知识是不能使其有效的发挥性能的。为此,本讲习是对必须掌握的最低限度的有关控制和机械方面的知识做初步的说明。YASKAWA前馈控制和反馈控制目标指令输出前馈控制器反馈控制器控制对象+-++前馈的流向反馈回路前馈控制:预测输出。不参考实际的输出。若控制对象有正确的模型,仅前馈控制已经足够了。→模型中存在误差,还包含参数的变动、外乱等。→反馈控制的必要性。反馈控制:为了使追踪偏差趋于0,必须使反馈增益无限大。→无法实现。平衡良好的使用反馈和前馈两者在NC机床上,对轨迹追随性的要求非常严格2.关于控制(1)YASKAWA若提高增益会引起什么呢?在伺服调整中,经常使用的增益有速度比例增益,位置比例增益。当在伺服调整中发生问题时,为避免执行错误的对策,必须要了解在提高增益时会引发哪些情况。<优点>・响应变快・抗干扰增强・追踪性提高<缺点>・产生机械共振・由于延迟要素和干扰而变得不稳定控制体自身产生振动具有代表性的延迟要素速度比例增益时:转矩滤波器全部位置比例增益时:速度比例增益提高增益时会产生2种振动重要2.关于控制(2)YASKAWA2.关于控制(3)若加入滤波器会引起什么呢?在伺服里各种滤波器作为一种应对振动的对策被使用。但是,如果使用错误的话,相反的也会引起振动。为掌握怎样的使用方法才是正确的,必须要了解加入滤波器后会引发哪些情况。使用滤波器后(增大时间常数)会引起如下现象。<优点>・能够抑制机械共振。<缺点>・延迟要素增加而变得不稳定,控制体自身产生振动。滤波器作为由机械共振而引起振动时的对策是◎作为由控制不稳定而引起振动时的对策是×重要YASKAWA2.关于控制(4)关于发生振动的结构发生的振动是提高增益→机械共振,控制体自身不稳定的振动加入滤波器→控制不稳定的振动伺服调整的基本是①为了加快响应而提高增益②由于增益的提高而产生了机械共振③通过加入陷波滤波器;延长转矩滤波器的时间常数来应对④为了加快响应而提高增益⑤产生控制体自身的振动(增益已不能再提高)按照以上的步骤执行。由于根据产生的振动,采取的对策有很大的不同,因此对发生振动的辨别能力是很重要的。重要YASKAWA3.关于装置(1)说明关于组合伺服和装置时发生的振动。另外介绍具有代表性构造的机械特性。3‐1.装置的振动,伺服的振动3‐2.SigmaWin的机械分析和振动的关系3‐3.具有代表性构造的机械特性YASKAWA3.关于装置(2)3‐1.装置的振动,伺服的振动用1个弹簧将伺服和装置简单的连接起来。此时若让伺服缓缓提高速度做往复动作,就会呈现“装置比伺服更大幅度摇摆的状态”和“装置几乎不动的状态”。装置比伺服更大幅度摇摆时的往复间隔称之为“装置的固有振动数,反共振频率”,装置几乎不动时的往复间隔称之为“共振频率”。动作装置伺服慢快装置的移动量=伺服的移动量缓慢动作装置和伺服一同动作装置比伺服更大幅度的摇摆装置几乎不动装置的固有振动数反共振频率伺服的机械共振共振频率YASKAWA3‐1-1.装置的固有振动数,反共振频率若动作变快,装置因固有振动数而变得摇摆不定。在即将要发生摇摆动作的时候让伺服停止,有时伺服虽到达停止位置,但此时弹簧仍弯曲。直至此弯曲的弹簧变直之前装置都是边摇边停的。此时伺服只受到制止装置摇动的反作用力。装置伺服装置比伺服更大幅度的摇摆伺服停止装置边摇边停伺服受到反作用力3.关于装置(3)YASKAWA3.关于装置(4)3‐1-2.伺服的机械共振,共振频率在本公司的伺服中有负载惯性力矩比(线性电机时叫作质量比)这个用户参数。此参数考虑到装置整体,设定比较一般。若伺服的响应速度变快而装置处于几乎不动的状态的话,则会变为“装置几乎不动≒未连接装置”,达到负载惯性力矩比的设定过大的状态。实质上,会变为和速度比例增益大相同的状态然后发生振动。装置伺服装置几乎不动无装置负载惯性力矩设定大↓速度比例增益大↓产生振动YASKAWA3.关于装置(5)3‐2.SigmaWin的机械分析和振动的关系机械共振(共振频率)是指“变得像无负载的状态=伺服轻快动作=增益提高”,在SigmaWin的机械分析的增益线图上呈山状。装置的固有振动数(反共振频率)是指“伺服受到反作用力=伺服的动作被抑制=增益下降”,在SigmaWin的机械分析的增益线图上呈谷状。伺服在负载变轻后动作轻快伺服受到反作用力,动作困难增益降低增益提高共振频率反共振频率YASKAWA3.关于装置(6)3‐3.具有代表性构造的机械特性3-3-1.滚珠丝杠结构滚珠丝杠结构的场合,机械分析的结果产生2个(以上)峰值。并且,各自的振动如下。(a)在滚珠丝杠的螺母部的刚性体(旋转)运动(频率较低的峰值)(b)滚珠丝杠・联轴器的扭转共振(频率较高的峰值)ゲイン位相1001000[Hz]ナット部(負荷の剛体運動)ボールねじカップリングYASKAWA3.关于装置(7)3‐3.具有代表性构造的机械特性3-3-2.皮带构造皮带构造的场合,机械分析的结果产生1个峰值。其特点是峰顶和峰谷之间的频率差以及增益・相位的变化比较大。ゲイン位相1001000[Hz]ベルトYASKAWA4.关于振动的对策(1)由伺服调整引起的振动有3种类型。关于此振动的特征和对策在此进行说明。4‐1.机械共振4‐2.由控制不稳定引起的振动4‐3.因惯性力引起的装置的摇摆YASKAWA4.关于振动的对策(2)4‐1.机械共振机械共振是在伺服调整中提高速度比例增益时,缩短转矩滤波器的情况下发生的比较多。一般的机械共振的对策就是使用各种滤波器。经常使用的滤波器有◇转矩滤波器(Pn401等)◇陷波滤波器由于机械共振在SigmaWin机械分析的增益线图中呈现山状,所以在进行伺服调整之前如果先实行机械分析的话可以讨论出适合装置的滤波器设定。<机械共振的辨别方法>减小转矩滤波器(Pn401等)的时间常数→振动(声音)恶化重要陷波滤波器YASKAWA4‐2.由控制不稳定引起的振动由控制不稳定引起的振动是因为增益和延迟要素的关系不适当而引起的。控制不稳定引起的振动几乎都是在◇提高增益时◇追加滤波器时◇增大滤波器的时间常数时发生的。另外一般情况下,即使设定了平衡性很好的参数(例如出厂参数),由于装置本身的原因也会引起振动。发生振动的装置的特征如下ⅰ.有皮带结构的装置ⅱ.负载惯性力矩比大的装置此种振动的对策一般是降低增益,缩短滤波器的时间常数。对于此种振动严禁使用滤波器。<由控制不稳定引起的振动的辨别方法>减小转矩滤波器(Pn401等)的时间常数→振动(声音)改善重要4.关于振动的对策(3)YASKAWA4‐3.因惯性力引起的装置的摇摆因惯性力引起的装置的摇摆是因为加快装置的动作引起的。在伺服调整中有时是因为提高响应(例如增大位置环增益,使用前馈等)而产生的。此类振动随着时间的推移而逐渐改善,伺服方面没有发生振动。此类振动的对策是改善指令。改善指令的方法有・使用指令滤波器・降低指令的加速度(需要向用户建议。)等。若发生此类振动,不管实施怎样的伺服调整,都不能在此基础上更快了。能够达到怎样的快速水平依赖于装置的摇摆频率。频率越高就越快。<因惯性力引起的装置的摇摆的辨别方法>增大指令滤波器的时间常数→摇动变小重要4.关于振动的对策(4)YASKAWA5.伺服调整的方法伺服调整基本是按照1.通过调整支持功能进行调整2.手动调整的顺序对响应性进行改善的。此时、负载惯性力矩比的设定是非常重要的。进行调整之前请务必设定。下面,对如何能够进行正常的设定进行说明。5‐1.关于调整支持功能5‐2.关于手动调整YASKAWA5‐1.关于调整支持的功能5-1-1.惯性力矩推定・质量推定(SigmaWin+)5.伺服调整的方法Step1在Pn103中设定正确的惯性力矩比(质量比)后即考虑了环增益的增益平衡性,则可实现伺服调整。伺服调整的短时间化・稳定化YASKAWA5.伺服调整的方法Step25‐1.关于调整支持的功能5-1-3.陷波滤波器的设定(SigmaWin+机械分析)由于机械共振在SigmsaWin机械分析的增益线图中呈现山状,所以在进行伺服调整之前如果先进行机械分析的话,可以讨论出适合装置的陷波滤波器(Pn409)的设定。メカの周波数特性共振周波数反共振周波数メカの周波数特性反共振周波数共振のピークが下がるYASKAWA5.伺服调整的方法Step35‐2.关于手动调整5-2-1.个别装置的手动调整即使设定考虑了增益平衡性的参数,由于装置本身的原因在停止时也有发生振动的情况。发生振动的装置的特征如下ⅰ.有皮带结构的装置ⅱ.负载惯性力矩比大的装置此类振动的对策是在实施调整支持功能后①缩短滤波器的时间常数如果这样还是不行的话②降低增益降低增益导致响应性不足,无法满足规定要求时,需要③使用增益切换功能,仅在停止时降低增益和手动调整。YASKAWA5.伺服调整的方法Step45‐2.关于手动调整5-2-2.缩短定位时间的手动调整①前馈功能(Pn109,Pn10A)如果这样还是不行的话,需要使用②模式开关模式开关在过于降低界限值后受摩擦的影响,可能会在P控制切换到P-I控制之前在积存有位置偏差的状态下停止,因此最好能控制使用。YASKAWA5.伺服调整的方法其他(1)5‐2.关于手动调整5-2-3.为抑制由惯性力引起的装置摇摆的手动调整①变更为跃度(加速度变化)变小的指令形状。・变更上位控制器的指令。ex)S字加减速、旋轮线等・设定移动平均滤波器(Pn207.0=1,Pn208)。加振点指令由于各加振点机台振动实际上由于这些振动叠加起来,残留的振动逐渐增大。指令加速度加速度变化梯形指令S字加减速指令加振力小YASKAWA5.伺服调整的方法其他(2)5‐2.关于手动调整5-2-4.为抑制由于受输入指令的影响而引起的振动的手动调整①变更上位控制器的指令。・指令的速度分辨率UP(提高)・指令的更新周期UP(加快)②设定移动平均滤波器(Pn207.0=1,Pn208)。・在Pn208中设定指令更新周期以上的值。※但是仅在Pn208中设定值会延长整定时间。指令更新周期缓慢指令呈阶梯状位置环的响应性良好,追随指令产生振动速度分辨率低指令不平滑位置环的响应性良好,追随指令产生振动速度分辨率实际的指令理想的指令实际的指令理想的指令指令更新周期转矩转矩
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 skyxiong
skyxiong
本文标题:安川伺服驱动器增益设置方法
链接地址:https://www.777doc.com/doc-3243061 .html