您好,欢迎访问三七文档
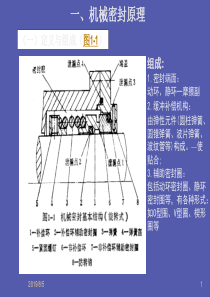
LocalizationusingaRegion-Basedk-NearestNeighbourSearchBrianMcKinnonApril13,2004AbstractThispaperexploresamethodofperforminglocalizationonlocalvisionmobilerobots.Itdescribesamethodofprocessingimages,extractingregions,andcomparingthoseregionsagainstadatabaseofpreprocessedimages.Localizationisachievedusingthek-nearestneighbouralgorithmasthebasisforapproximatingthecurrentposition.Initialresultsareprovidedthatshowthepotentialofthismethod.1IntroductionTheabilitytomaintainanaccurateestimateofaroboticagent’spositionandorientationiscrucialinanyreal-worldapplication.Theprocessoflocalizingisanessentialcomponentofbothmappingandpathplanning.Thesethreecomponentsprovideagatewaybetweenthehigh-levelbehaviours,andthelow-levelmotorcontrols.Currently,thereisagrowingmarketforrobotsthatcanoperateautonomouslyinindustrial,office,andconsumerenvironments.Eachpossessesuniquechallenges,anddemandstheabilitytooperatewithoutfailure.Roboticsocceriscurrentlyanimportantarenafordevelopingandtestinglocalizationsystems.Itrequiresgoalorientedpathplanning,inawelldefinedenvironment.Figure1showsthestandardmarkersassociatedwithasoccerfieldincludeboundaryandcentrelines,goalandpenaltykickboxes,andalargecen-trecircle.Thedimensionsofthefieldarewelldefinedforeachleaguesinthecompetition.Thesecurrentlyincludethesmall-size,medium-size,and4-leggedrobotleagues.Theproblemoflocalizationisamplifiedinthisenvironmentbythepresenceofothersoccerplayers,thatproduceunpredictableocclusionofonboardsensors.Currently,theselocalizationsystemsrelyonartificialland-marksthatareplacedaroundthefieldatknownlocations.Thismeansthatlocalizationcanbesolvedthroughtriangulationoffieldmarkers.However,theselandmarksareslowlybeingremovedtoenforcethegoalofoperatingwithinanaturalenvironment.Inanygivenenvironment,thereisawealthofnaturalfeaturesthatcanbeusedtodetermineone’spositionandorientation.Allsolutionstolocalizationrequiretheabilitytointerpretandrepresentsensoryinformationinawaythat1Figure1:Thestandardfieldlayoutinasoccergame.Imageisfromfindabalancebetweencompactnessandcompleteness.Completnesstoallowdistinctionofindependentlocationinanenvironment,compactnesssinceitisunreasonabletostorealltherawsensordata.Vision-basedlocalizationisanintuitivemethodtoconsider,sinceweashumansrelyonvisiondatatodetermineourpositions.Visionprovidesfarmoredetailedinformationthancanbeacheivedthroughdistancesensors(sonar,laser)alone.Infigure2,itiseasytodeterminethatyouareinakitchen,sincetherearesomanydistictfeatures.Thepresenceofthesefeaturesmakesvisualdataaverygoodcandidateforperforminglocalization.Thereisapricehowever,sinceprocessingimagesiscomputationallyexpensivewhencomparedwithdistancesensors.Inthispaper,theproblemofvision-basedlocalizationwillbebrokenintotwoseparateprocesses.Thefirstisrelatedtoimageprocessing,withthegoalofperformingextractionandrepresentationofregionswithinacapturedimage.Thiswillincludeastudyofthemethodscurrentlybeingresearched,aswellasadescriptionoftheproposedsystem.Thesecondprocessinvolveslocalizingtheagentbasedonasetofpreprocessedimagesofknownlocationsandorien-tations.Avarietyoflocalizationsystemswillbeexamined,includingsimilarvisionbased,andmoretraditionaldistancesensorbasedsystems.2RelatedWorkBothregionextractionandlocalizationareactiveareasofresearch.Thereareawidevarietyofsolutionscurrentlybeinginvestigated,manyoftheseyieldingpromisingresultsfortheimprovementofanagent’sperformance.2Figure2:Thispicturedemonstratestheamountofinformationavailablefromvisualdata.2.1RegionExtractionandMatchingThetwomostimportantstepsinregionextractionareidentificationandrep-resentationoffeaturesintheimage.Researchisstillactiveinthisarea,sincecurrentsystemsencounterenvironmentsthatcausefailureratestobecomeun-manageable.Examplesofsystemscurrentlybeingstudiedinclude[7][4]and[5].2.1.1ScaleInvariantFeatureExtractionIn[7]anobjectrecognitionsystemisintroducedthathasbecomeknownasScaleInvariantFeatureExtraction(SIFT).Itusesafeaturerepresentationthatisinvarianttoscaling,translation,rotation,andpartiallyinvarianttochangesinillumination.Theoutputofthissystemisasetcontainingtheorientation,position,relativelocation,andcolourgradientofkeyfeatureswithinanimage.ScaleinvarianceisachievedthroughtheuseoftheGaussiankernelasdescribedin[6].Forrotationalinvarianceandefficiency,keylocationsareselectedatthemaximaandminimafromthedifferenceoftheGaussianfunctionappliedinscalespace.Athresholdisappliedtothegradientmagnitudeforrobustness.Thisisusefulsinceilluminationchangesmaygreatlyaffectthegradientmagni-tude,howeveritshouldhavelittleimpactonthedirection.Onceasetofkeysaredefinedforagivenobject,liveimagesarescannedandobjectsareselectedusingabest-bin-firstsearchmethod.Binscontainingatleastthreeentriesforanobjectarematchedtoknownobjectsusingaleastsquareregression.Ex-perimentalresultsshowthatthesystemiseffectiveatdetectingknownobjects,eveninthepresenceofocclusion,sinceonlythreekeysarenecessaryforamatchtooccur.Thiscanbeseeninfigure3.Usingthismethod,alocalizationsystemhasbeenimple
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 中国人民银行
中国人民银行
本文标题:Localization using a Region-Based k-Nearest Neighb
链接地址:https://www.777doc.com/doc-3298057 .html