您好,欢迎访问三七文档
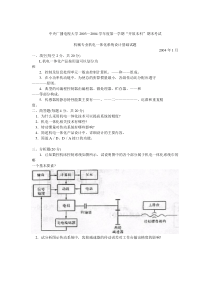
相位摩擦焊1.相位摩擦焊的研究现状普通摩擦焊机在刹车制动阶段不控制旋转工件相对于另一侧工件的相位。相位摩擦焊是一种在摩擦焊过程中可以准确地使工件之间保持一定相位关系的特殊旋转摩擦焊;主要用于焊接界面为圆形或近圆形的如六方形钢、八方形钢、汽车操纵杆等对相互角度位置配合有要求的工件。相位摩擦焊机的结构主要包括主轴系统、液压滑台与控制系统三大部分,如图1所示.图1相位摩擦焊机结构图在工作加工应用中相位摩擦焊机多用于加工如图2所示的场合,用于加工两端具有特殊位置求的工件。图2相位摩擦焊机在结构上可分为双头式和单轴式双头式相位摩擦焊实际上是机械同步相位摩擦焊,所以又被称为共轭焊;其结构特点为固定夹具座安装在床身导轨的中部,移动夹具座安装在固定夹具座两端的导轨上并与两端的液压缸分别相连接。双头式相位摩擦焊机又分为中间轴旋转和两侧轴旋转两种形式。(1)中间轴为旋转式的结构,其特点是空心轴安装在固定夹具座上,在空心轴的两端分别安装着夹头。因为采用了空心轴的结构,使被加工的管件套装在空心轴内,解决了在现有的机床夹头上不能夹持长度较长的套管结构的难题,而焊接工件分别夹持在移动夹具座上。(2)两侧轴为旋转式的结构,其特点是中间为固定夹具,保持不动,两侧为移动夹具,保持同步旋转。双头式相位摩擦焊可以同时将三个工件焊接在一起并保证相位配合精度较高。但还存在着耗用功率相对较高,结构比较复杂,设备振动相对较大,两侧焊缝质量较难控制一致等问题。特别是不能用于一个接头、一对有相位控制要求的工件焊接。对于单轴式相位摩擦焊,其关键技术就是当检测到合适的转动速度时立即启动定相位装置。目前常见的定相位控制方法分为两种:(1)电子直流制动法,当主轴转速降到某一速度值时,由控制器发出控制指令启动相位检动,实现刹车定位控制。电子直流制动相位摩擦焊主要是在摩擦焊接即将结束的时候,系统开始检测主轴转速,当主轴转数降低到要求范围之内时,系统发出一个制动命令给变频器,由变频器直流制动来控制相位对正。这种控制方法没有过多的附加机械机构,无冲击,噪声小,定位精度高于±1°。(2)电子机械强制定位法,该方法是在制动降速阶段启动相位检测系统,当转速降到设定值时且两工件相位对中,则自动启动定相位装置进行强制定位,使工件被强制定位在工艺所要求的相对位置处。这种定位方法精度可高于±0.3°,但冲击较大。机械同步相位摩擦焊首先将主轴后面的定位凸轮压紧,人工调整焊件的相位并用夹具夹紧,接着将固定主轴用副制动器制动并松开定位凸轮。之后就是进行常规的摩擦焊接,当焊接结束时,断开电源并用主制动器制动驱动主轴,等到主轴即将停止时(控制系统检测)松开主制动器,控制系统发出命令压紧定位凸轮,将相位锁定。相位摩擦焊接关键技术就是主轴定相位,即当主轴停止时,控制其停于固定位置,使工件焊后的棱边或方向对正,相位配合适当,即主轴准停。主轴定相位可分为机械准停与电气准停,它们的控制过程是一样,可用霍尔元件、光电编码器以及液压伺服控制来控制主轴的转动。相位摩擦焊机的工艺1、摩擦焊工艺参数焊接过程可以控制的主要参数有转速、摩擦压力、摩擦速度、摩擦时间、摩擦变形量、停车时间、顶锻压力、顶锻时间、顶锻压力、顶锻变形量等,其中,摩擦变形量和顶锻变形量(总和为缩短量)它是其他参数的综合反映。就连续驱动摩擦焊而言,我们可以将上述参数归纳为三个主要参数:速度、压力、时间。速度:包括主轴旋转速度、摩擦进给速度;压力:包括摩擦压力、顶锻压力;时间:包括摩擦时间、停车时间、顶锻时间。这就是摩擦焊的“三要素”,其三者相辅相成,在材料焊接性能良好的情况下,通过不同的选择,可以得到很宽的焊接带。如:保持速度不变,增加压力减少时间,可以提高生产效率;保持压力不变,提高转速减少时间,同样可以提高生产效率;或加长时间,降低转速和压力,可以延长设备的使用周期等。由此引出了下面的概念:转速和摩擦压力的选用范围很宽,它们不同的组合可以得到不同的焊接规范,常用的组合有两种——强规范和弱规范。强规范:转速低摩擦压力较大,摩擦时间短-----他特别适合于异种材料的焊接(如铜—铝等)。弱规范:转速高,摩擦压力小,摩擦时间长。-----适合于同种材料和材料性能相近的焊接。摩擦焊接时,压力必须足够大,以便于使整个端面保持紧密接触和产生足够的热量,压力较高时,达到焊接温度和稳定状态较快,热影响区较窄,焊接时间缩短。不同规范的选择,将对焊接带来不同的影响:1)转速、摩擦压力和摩擦速度焊接转速、摩擦压力和摩擦速度直接影响摩擦扭矩、摩擦加热功率、接头温度场、塑性层厚度、摩擦变形速度以及焊缝质量。当工件直径一定时,转速越高,则摩擦速度越高;焊接表面温度越高,摩擦端面塑性变形层厚度将减小,深塑区向轴心移动,不利于杂质排除和接头封口。2)摩擦时间摩擦时间影响加热程度、轴向变形量和焊接能量的消耗,对焊接的温度、温度场和质量有直接影响。合理的摩擦时间应使接头在加热阶段终了时形成较厚的变形层和较小的飞边,而且在顶锻阶段产生较大的轴向变形和较大的飞边,这样整个飞边的尺寸不大,但形状封闭圆滑,有利于改善接头的焊接质量,如果时间短则界面加热不充分,接头温度和温度场不能满足焊接要求,如果时间太长,则消耗能量多,热影响区大、高温区金属易过热,变形大,飞边也大,消耗材料也多,同时加长了工作时间,影响生产效率。当摩擦变形速度一定时,摩擦变形量和摩擦时间成比例。因此可用摩擦变形量代替摩擦时间来控制加热过程。3)摩擦变形量摩擦变形量与转速、摩擦压力、摩擦时间、摩擦速度、材质的状态和变形抗力有关,要得到牢固的接头,必须有一定的摩擦变形量。4)顶锻压力、顶锻变形量和顶锻变形速度顶锻压力的作用是挤出摩擦塑性变形层中的氧化物和其它有害杂质,并使焊缝得到锻压,结合牢固,晶粒细化,性能良好的焊接接头。顶锻压力的选择与材质、接头温度、变形层厚度以及摩擦力有关。材料的高温强度高时,顶锻压力要大,温度高、变形层厚度小时,顶锻压力要小(较小的顶锻力就可以得到所需要的顶锻变形量)。摩擦压力大时,相应的顶锻压力要小一些。顶锻变形量是顶锻压力作用结果的具体反映。顶锻速度反映了“趁热顶锻”的响应品质,如果顶锻速度慢,则达不到要求的顶锻变形量。2、摩擦焊的接头形式相位摩擦焊的国内外研究现状及发展前景1、惯性相位摩擦焊机摩擦焊剂一般分为连续驱动焊机和惯性摩擦焊机,目前国内所用摩擦焊机大部分是连续驱动摩擦焊机,相位摩擦焊的研究开发基本上都是在连续驱动摩擦焊机的基础上进行的。但是惯性摩擦焊机具有工艺控制参数少、热输入小、变形小、焊缝窄,尤其适用于焊接异种材料,如粉末合金与高温合金的焊接的优点。此焊机是将样品各种要生产样品的在主轴上加到一定的数值,另其进行惯性摩擦焊,并记录其中的各种参数,当焊机再次加工同样零件的时候现实加速旋转到之前的速度,然后通过惯性摩擦焊进行加工,可生产出与之前角相位相同的零件。2、全电式伺服单头相位摩擦焊机全电式伺服单头相位摩擦焊机,包括床身、设置于床身一端的主轴箱、通过皮带轮带动主轴箱内主轴同步旋转的电机、安装于主轴箱端面与主轴一起旋转的旋转夹具、设置于床身上的滑台、依次安装于滑台上的移动夹具、零件定位块、限位杆以及推座,所述床身上表面设置有丝杆传动机构,滑台与丝杆传动机构的丝杠连接座相连,丝杆传动机构通过皮带轮连接安装于床身内的减速机,减速机连接推力伺服电机。这种机器可以在相位控制阶段检测到相位对中时释放移动端,使移动端工件随主轴一起完成最后的转动。此方法能有效避免冲击或强制扭矩,有利于提高相位控制精度。3、国内一些公司生产相位摩擦焊的现状国内目前有锐成和哈尔滨正晨等企业生产相位摩擦焊机他们的定位精度大概在±0.5%—±1%以上。锐成公司生产的摩擦焊机参数如下表所示:哈尔滨正晨公司主要生产大型相位摩擦焊机,可生产大于130吨的产品。4、日本日东制机株式会社连续驱动摩擦焊机主轴旋转伺服控制利用伺服马达和独特的控制程序对主轴进行控制,可确保停止角度和停止时间的稳定,实现高精度的角度控制(停止角精度±0.2o)。并且无需以往的油压式制动,所以不需要制动片一类的消耗品。这种伺服化具有工作稳定,不受油温影响、结合精度高、CO2排放量低于油压式提升节能效果等优点。其产品如图9所示。图9此家日本公司主要生产中小型高精度相位摩擦焊机,代表世界先进水平,其产品的参数如下表所示:闪光对焊与摩擦焊的比较闪光对焊是将焊件装配成对接接头,接通电源,使端面逐渐达到局部接触,利用电阻热加热这些接触点(产生闪光),使端面金属熔化,直至焊件端部在一定深度范围内达到预定温度时,迅速施加顶锻力完成焊接,如图10所示:图10闪光对焊原理图闪光对焊的焊接工艺可分为连续闪光焊、预热闪光焊和闪光-预热闪光焊等。1、连续闪光对焊连续闪光对焊的工艺过程包括:连续闪光和顶锻过程。施焊时,先闭合一次电路,使两根钢筋端面轻微接触,此时端面的间隙中即喷射出火花般熔化的金属微粒---闪光,接着徐徐移动钢筋使两端面仍保持轻微接触,形成连接闪光。当闪光到预定的长度,使钢筋端头加热到将近熔点时,就以一定的压力迅速进行顶锻。先带电顶锻,再元电顶锻到一定长度,焊接接头即告完成。2、预热闪光对焊预热闪光对焊是在连续闪光焊前增加一次预热过程,以扩大焊接热影响区。其工艺过程包括:预热、闪光和顶锻过程。施焊时先闭合电源,然后使两根钢筋端面交替地接触和分开,这时钢筋端面的间隙中发出断续的闪光,而形成预热过程。当钢筋达到预热温主后进入闪光阶段,附后顶锻而成。3、闪光-预热闪光焊闪光-预热闪光焊是在预热闪光焊前加一次闪光过程,目的是使不平整的钢筋端面烧化平整,使预热均匀。其工艺过程包括:一次闪光、预热、二次闪光及顶锻过程。施焊时首先连续闪光,使钢筋端部闪平,然后同预热闪光焊。相比较闪过对焊摩擦焊具有以下优点:1、焊接质量稳定,焊件尺寸精度高,接头废品率低于电阻对焊和闪光对焊。摩擦焊可以实现高精度的焊接,例如用摩擦焊生产的柴油机发动机预燃烧室,全长误差为±0.1mm,专用机可保证焊后的长度公差为±0.05mm,偏心度为0.1mm。2、焊接生产率高,比闪光对焊高数倍。摩擦焊相比熔焊或其他焊接其控制参数少,焊接过程简单,生产率高(通常比其他焊接方法快1-100倍),非常适合批量化工业产品的生产。例如涡轮蛇形管摩擦焊机的生产率为:120件/h,而闪光焊机仅为20件/h,发动机排气阀双头自动摩擦焊机的生产率可达800-1200件/h;3、适于焊接异种金属,摩擦焊既可用于焊接普通的异种钢,也可以焊接性能差别很大的异种钢和异种金属,甚至可以将金属和非金属焊接起来,如铝和陶瓷的焊接。对于通常认为不可以组合的金属材料,诸如铝——钢、铝——铜、钛——铜以及镍合金和钢材料等都可以进行焊接。一般来说,凡是可以进行锻造的金属材料都可以焊接,包括汽车用阀门合金材料,马氏体时效钢、工具钢、合金钢以及钛合金。4、加工费用低,省电,焊件无需特殊清理。摩擦焊设备大多数采用三相交流供电,主轴电机功率因数高,电网负载均衡。摩擦焊过程产生的热能几乎完全作用与摩擦界面上,与闪光焊相比,其耗电量仅为闪光焊的8%-10%,电能节省5-10倍,功率消耗仅为传统焊接工艺的20%。同时摩擦焊不需焊条、焊剂、钎料、保护气体,不需填加金属,也不需消耗电极。5、易实现机械化和自动化,操作简单,焊接工作场地无火花,弧光及有害气体。无需安装排烟、换气装置。6、可获得与母材一样的接和强度。如图11所示图11摩擦焊拉伸实验摩擦对焊也有一些不足之处:靠工件旋转实现,焊接非圆截面较困难。盘状工件及薄壁管件,由于不易夹持也很难焊接。受焊机主轴电机功率的限制,目前摩擦焊可焊接的最大截面为20000mm2。摩擦焊机一次性投资费用大,适于大批量生产。45号钢测试实验设计1、45号钢轴的直径选择45#钢的抗拉强度为600MPa(GB/T699-1999)由于拉断实验机的最大拉力为5T,所以这里取钢轴的额定拉断力为4T及40000N。因为拉断里=抗拉强度×截面积,代入数据可得:40000=600×106×π·(d/2)2可以求出d=9.21mm,因此去d=9mm。2
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 1546769
1546769
本文标题:相位摩擦焊
链接地址:https://www.777doc.com/doc-3743683 .html