您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 资本运营 > 精品【毕业设计】基于DSP的履带机器人避障系统研究-定
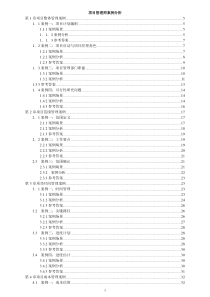
I目录摘要............................................................ⅢABSTRACT........................................................Ⅳ第一章引言.......................................................11.1研究的目的和意义...........................................11.2履带机器人避障系统研究的现状及发展趋势.....................11.2.1国内履带外机器人避障系统的研究现状......................11.2.2国内外履带机器人避障路径规划研究现状....................71.3履带机器人研究存在的问题..................................101.4论文各部分内容............................................10第二章基于DSP的履带机器人避障系统硬件原理......................112.1系统硬件总体设计方案......................................112.2履带机器人DSP控制器选择与介绍............................122.2.1TMS320F2812芯片介绍...................................132.2.2系统外部扩展存储器.....................................132.3传感器的选择与介绍........................................142.3.1声纳传感器.............................................142.3.2航向角传感器...........................................162.3.3速度传感器.............................................162.4电机的选择与功率驱动主回路设计............................172.5硬件系统抗干扰技术........................................192.6本章小结..................................................20第三章履带机器人避障方法设计....................................213.1履带机器人避障控制的总体框图..............................213.2履带式移动机器人的运动学模型..............................213.3履带式移动机器人的环境建模................................223.4覆盖式路径规划的数学描述..................................243.5覆盖式路径规划的方法设计..................................253.6轨迹控制算法的设计........................................263.7本章小结..................................................27II第四章基于DSP的履带机器人避障控制算法的仿真....................284.1控制算法..................................................284.2避障控制算法的MATLAB仿真...............................304.3本章小结..................................................33第五章基于DSP的履带机器人避障系统的软件设计....................345.1DSP开发环境介绍..........................................345.2避障控制系统程序..........................................345.2.1主程序模块.............................................345.2.2避障模块...............................................365.2.3PID模块...............................................365.2.4A/D转换模块...........................................385.3本章小结..................................................39第六章结论与展望................................................406.1结论......................................................406.2研究展望..................................................40致谢..............................................................41参考文献..........................................................42基于DSP的履带机器人避障系统研究摘要III摘要本文设计了基于DSP的履带式机器人避障系统系统。首先对履带机器人的国内外研究和使用现状进行了较为全面和详实的介绍,从而寻求出该课题的研究方向;同时介绍了机器人的各种避障控制算法。其次,介绍了履带机器人避障系统的总体结构方案设计。为实现整个系统的行走及避障功能要求,对系统控制芯片和车轮驱动电机的类型等进行了选择。确定了以TMS320F2812DSP为核心控制器,直流电机为主要运动机构的机器人核心部分;同时,设计了机器人的主要硬件构造。本文随后根据控制要求分析了系统所需的硬件结构。搭建了一个基于DSP的机器人控制平台,概括了硬件电路设计中所必须考虑的抗干扰措施。之后阐述了控制系统的软件设计方法。以车轮电机控制采用增量式PID控制算法为重点,介绍了软件控制的总体策略与控制结构,并对仿真结果进行了比较;然后分块介绍各个模块程序与必要的寄存器的设置。最后,总结了作者的研究成果,并阐述需要进一步深入研究的工作。关键词:履带机器人,避障系统,自主导航,DSP系统,运动学模型。基于DSP的履带机器人避障系统研究摘要IVABSTRACTThisarticledesignedthesystemwhichhasevadedbasedontheDSPmarchingrobotbonds.Firsthascarriedonmorecomprehensiveandadetailedintroductiontothecaterpillarbandrobot'sdomesticandforeignresearchandtheusepresentsituation,thusseeksthistopictheresearchdirection.Simultaneouslyintroducedrobot'seachkindevadesbondsthecontrolalgorithm.Next,introducedthecaterpillarbandrobotevadesbondssystem'sgrossstructureprojectdesign.Inordertorealizeoverallsystem'swalkandevadebondsthefunctionrequest,actuatedelectricalmachinery'stypetothesystemscontrolchipandthewheelandsoontocarryonthechoice.HaddeterminedtakeTMS320F2812DSPasthecorecontroller,thedirectcurrentmachineforthemainmotionrobothardcore.Atthesametime,hasdesignedrobot'smainhardwarestructure.Thisarticlehasanalyzedthehardwarearchitecturewhichaccordingtothecontrolrequestthesystemneeds.HasbuiltonebasedontheDSProbotcontrolplatform,summarizedtheanti-jammingmeasurewhichinthehardwarecircuitdesignmustconsider.Afterwardelaboratedcontrolsystem'ssoftwaredesignmethod.Usesthedifferentialmotionactuationtypecaterpillarbandrobotcontrolalgorithmtakesthewheelmotorcontrolasthekeypoint,introducedsoftwarecontrol'soverallstrategyandthecontrolstructure,andhascarriedonthecomparisontothesimulationresult.Thenthepiecemealintroducedthateachmoduleprocedureandtheessentialregister'sestablishment.Finally,summarizedauthor'sresearchresults,andelaboratedthatneedsfurtherdeepresearchwork.Keywords:Caterpillarbandrobot,Obstacleavoidance,Autonomousnavigation,DSP,Kinematicsmodel.基于DSP的履带机器人避障系统研究第一章引言1第一章引言1.1研究的目的和意义在人类文明的悠远长河中,我们看到了人类进步的脚印:各种机器的发明大大地减轻了人们的体力劳动;与此同时,电子计算机的发明与推广应用也在很大程度上代替了人们所进行的脑力劳动;而机器人作为二者结合的产物则可以完成许多人类“力所不能及”的工作。机器人移动的研究始于60年代末期。斯坦福研究院(SRI)的NilsNilssen和CharlesRosen等人,在1966年至1972年中研造出了取名Shakey的自主移动机器人。目的是研究应用人工智能技术,在复杂环境下机器人系统的自主推理、规划和控制。与此同时,最早的操作式步行机器人也研制成功,从而开始了机器人步行机构方面的研究,以解决机器人在不平整地域内的运动问题,设计并研制出了多足步行机器人。其中最著名是名为GeneralElectricQuadruped的步行机器人。70年代末,随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。特别是在80年代中期,设计和制造机器人的浪潮席卷全世界。一大批世界著名的公司开始研制移动机器人平台,这些移动机器人主要作为大学实验室及研究机构的移动
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
 perfect00000
perfect00000
本文标题:精品【毕业设计】基于DSP的履带机器人避障系统研究-定
链接地址:https://www.777doc.com/doc-4328456 .html