您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 55华水自控原理试题及答案(内部)
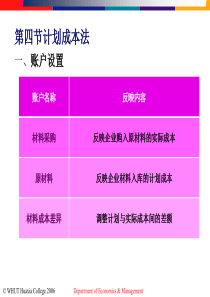
华北水利水电学院考试试卷(A卷)2008~2009学年一学期时间110分钟08年12月19日自动控制原理课程64学时4学分考试形式:闭卷1.简答题(每小题5分,共15分)1)简要画出二阶系统特征根的位置与响应曲线之间的关系。2)什么叫相位裕量?系统的相位裕量影响系统的哪些动态指标?3)画出计算机控制系统的方框图。并简述它与模拟控制系统的异同。2.求系统的传递函数或输出(共20分)2.1画如下RC无源网络的方框图,并求其传递函数(8分)2.2已知某单位反馈系统的开环Bode图如下所示,求其闭环传递函数。(6分)2.3求如下系统的闭环传递函数(采样周期为1s)。(6分)题2.1图RC无源网络题2.2图[-1][-2][-3]400-123.一控制系统的动态结构图如图3所示。(1)求当≤20%、tS(5%)=1.8s时,系统的参数K1及值。(2)求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。(15分)题3图4.某单位反馈系统其开环传递函数为00()(0.11)(0.21)KGssss,绘制系统根轨迹(12分)5.某单位反馈系统其开环传递函数为00()(0.11)(0.21)KGssss(32分)(1)绘制Nyquist图;并根据奈氏稳定判据求K0的稳定范围(2)设计串联校正装置,使系统的稳态速度误差系数KV=30s-1,≥40,20lgKg≥10dB,c≥2.3rad/s。6.图示分别为负反馈系统Nyquist图,判断系统是否稳定,如不稳定,指出不稳定根个数(共6分)b)v=1,p=0-1-1题6图a)v=2,p=0-1c)p=1题2.3图r(t)ZOHc(t)11sTS=1热动2004级自动控制原理试题(A卷)解题要点2.1画如下RC无源网络的方框图,并求其传递函数(8分)解:用复阻抗写电路方程式:sCSISVRSUSUSIsCSISISURSUSUSIccccCr222221212111111)()(1)]()([)(1)]()([)(1)]()([)((1)将以上四式用方框图表示,并相互连接即得RC网络结构图如下。(4分)(2)用梅逊公式直接由图2-6(b)写出传递函数Uc(s)/Ur(s)。KGGK独立回路有三个:12311122221221111111111,,LLLRCSRCSRCSRCSCSRRCS回路相互不接触的情况只有L1和L2两个回路。则2221121121SCRCRLLL题2.1图RC无源网络由上式可写出特征式为:222111222112132111111)(1SCRCRSCRSCRSCRLLLLL通向前路只有一条:221212211111111SCCRRSCRSCRG由于G1与所有回路L1,L2,L3都有公共支路,属于相互有接触,则余子式Δ1=1代入梅逊公式得传递函数1)(111111121221122121222111222112221111sCRCRCRsCCRRsCRCRsCRsCRsCRsCRCRGG(8分)2.3已知某单位反馈系统的开环Bode图如下所示,求其闭环传递函数。解:由图可得:012()(1)(1)KGssTsTs(2分)L(5)=40-40lg5/1=01=0.5T1=2(3分)L(1)=L(0.5)=20lgK/1=40=50(4分)L(2)=-40lg2/5=-122=10T2=0.1(5分)050()(21)(0.11)Gssss(6分)2.4求如下系统的闭环传递函数(采样周期为1s)。题2.3图[-1][-2][-3]400-12解:10111()(1)(1)1TseGzZzZssss【1分】111(1)1zZZss【2分】11(1)1zzzzze【3分】1.3680.368zz【4分】其闭环脉冲传递函数为001.368()1.3680.368()1.3681()21.73610.368zGzzzzzGzzz【6分】3.一控制系统的动态结构图如图3所示。(1)求当≤20%、tS(5%)=1.8s时,系统的参数K1及值。(2)求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。(15分)题3图解(1)系统开环传递函数为1210112()()1KKsGsKsssKs【3分】题2.4图r(t)ZOHc(t)11sTS=1与标准型相对比,得2112nnKK【4分】由20%,得22ln0.20.46(ln0.2)【6分】由1.8st,得33.62nst所以K1=13.1【8分】120.254nK【10分】(2)系统的稳态误差系数分别为:0000200lim()1lim()3.93lim()0psvsasKGsKsGsKsGs【13分】输入为r(t)=1+2t时的稳态误差为120.511SSRPVeKK【15分】4.设一单位反馈系统其开环传递函数为00()(0.11)(0.21)KGssss,(1)试画出其根轨迹图,求K0的稳定范围。(12分)解0050()(10)(5)(5)(10)KKGsssssss①系统有三个开环极点,没有开环零点,故根轨迹有三个分支,对称于实轴并全部终止于无穷远零点,有3条渐近线。【1分】②根轨迹渐近线与实轴交点为5mnZiPia根轨迹渐近线与实轴交角为,3,分别)2,1,0()12(为kmnka【3分】③在实轴上的(-∞,-10]、[-5,0]区间存在根轨迹【4分】④显然,根轨迹在[-5,0]区间有分离,由[(5)(10)]0dsssdS可得:3S2+110S+250=0,其解为S1=-7.88,S2=-2.11经验证S2为分离点。【6分】⑤将jS代入特征方程式S3+15S2+50S+K=0得K152+j(503=0解方程得00,其中00和75025KKK为根轨迹起点,故根轨迹与虚轴交点为)25,0(j,此时K=750,即K0=15,故稳定范围为0K015【9分】⑥故此得到系统的根轨迹如下:25K60o-50-5K=750K25σjωS-Plane【12分】5.设一单位反馈系统其开环传递函数为00()(0.11)(0.21)KGssss,(1)绘制其Nyquist图,求K0的稳定范围;(2)设计串联校正装置,使系统的稳态速度误差系数KV=30s-1,≥40,20lgKg≥10dB,c≥2.3rad/s。(44分)解:(1)绘制Nyquist图,11022()(900.10.2)10.0110.04(0)90,()270KGjtgtg【4分】,,且,所以Nyquist图从负虚轴的左边开始顺时针转动,最后终止于原点,如图所示。【10分】开环幅相曲线与负实轴相交,交点坐标如下:0023()0.03(0.02)KGjj故交点处频率g满足方程gg,即52g【13分】交点处幅值为00()15gKG,由奈氏稳定判据可知当0()1gG时系统稳定,即系统稳定范围为K015。【16分】(3)系统设计①、由KV=30可得K0=30,据此绘制原系统的Bode图如下。【3分】由图可得校正前系统的性能指标为:11030111.4/0.10.2901.142.2825.3ccccradstgtg【6分】显然相位裕量不满足要求。②如采用超前校正。那么cm=40+25+565,此时系统相角在c附近变化剧烈,且校正后c将会大于12,故本例不能采用超前校正。考虑到,本例题对系统截止频率值要求不大(c≥2.3),故选用串联滞后校正,通过降低截止频率c来满足需要的性能指标。【7分】③根据要求的相角裕量确定截止频率c:o(c)=c(c)180=40(6)180=134o由图得c≤2.8,故根据题意可取c=2.7。【9分】【或根据o(c)=134o算出c=2.8】④确定滞后校正装置传函:先根据L0(c)+20lgb=0求出b值,然后取2=1/bT=0.1c求出bT、T,最后得到校正装置的传递函数GC(s):-K0/15ju00ccc030(ω)20lg20lg20lg02.7101010103.7,T=41.15ω2.7bω0.092.730(3.710.093.)()()(0.11)(0.21)(41.171()41.15151)CCbsGLbbbTsGsGsssssss【13分】⑤校正后系统的Bode图如下图所示,由该图可知,校正后系统的c=2.7,相位裕量约为41o,已满足设计要求。【16分】5.1已知系统特征方程2s5+s4+6s3+3s2+s+1=0。(4分)解:列出routh表:s5261s4131s30()-1s2(3+1)/1s1-1-2/(3+1)s01第一列元素中符号改变两次,故系统不稳定,有两个不稳定根。【4分】5.2图示分别为负反馈系统Nyquist图。(6分)10010110-110240200-20-40[-1][-2][-3]c0=11.4=250c=2.7=410[-2][-1][-2][-3]解:a)由图可见,:0+∞范围内Nyquist图不包围(-1,j0)点,故Z=p+2N=0,故系统稳定。【2分】b)由图可见,:0+∞范围内Nyquist图顺时针包围(-1,j0)点一次,故Z=p+2N=2,故系统不稳定,有两个不稳定根。【2分】c)由图可见,:0+∞范围内Nyquist图逆时针包围(-1,j0)点1/2次,故Z=p+2N=1-2*1/2=0,故系统稳定。【2分】v=2b)-1-1题5.2图v=1a)-1p=1c)华北水利水电学院考试试卷(B卷)2008~2009学年一学期时间110分钟08年12月19日自动控制原理课程64学时4学分考试形式:闭卷专业年级:热动06级总分100分,占总评成绩70%一、简答题(20分)1、(6分)闭环自动控制系统是由哪些环节组成的,各环节在系统中起什么作用?2、(8分)比较串联超前校正和串联滞后校正的校正功能和校正原理。3、(6分)自动控制系统的性能指标有哪些?简单说明之。二、(每小题5分,共10分)求下图所示各系统的传递函数。1、求G(s)=Xc(s)/Xr(s)。2、求G(s)=Uc(s)/Ur(s)。图2-1图2-2三、(15分)一控制系统的动态结构图如图3所示。1、求超调量=16.3%、调节时间tS(5%)=1.65s时,系统的参数K及值;2、求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。图3四、(15分)设一单位反馈系统其开环传递函数为00()(0.11)(0.21)KGssss,画出其根轨迹图,求K0的稳定范围。五、(13分)判断系统是否稳定,如不稳定,指出不稳定根个数1、已知系统特征方程2s5+s4+6s3+3s2+s+1=0。(4分)2、图示分别为负反馈系统的零极点图、Nyquist图。(9
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 ccgo
ccgo
本文标题:55华水自控原理试题及答案(内部)
链接地址:https://www.777doc.com/doc-4333952 .html