您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > VW01055-21-基准点系统
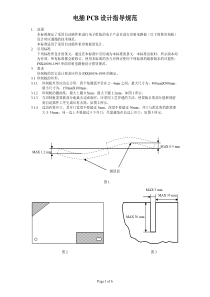
共13页第1页基准点系统(RPS)VW01055版本日期翻译日期译校日期打印/誊抄日期校对1996.12谭本银2008.6陈勇华2008.06佘文瑾2008.06黄惠芳注意保密。未经上海大众汽车有限公司的书面同意,不得复制、外传。译文仅供参考。参考资料目录VW010521应用范围和用途VW01059T12理论基础VW010772.1针对构件的坐标系统VW010782.2基准点系统接收的标准值规格/标准值标记33-2-1法则4名称和图纸表示4.1RPS(基准点系统)名称4.2图纸表示4.3无独立图纸(o.Z.)的构件或总成的处理方法5标注尺寸和规定公差5.1概述5.2平行于网络的针对构件的坐标系统5.3旋转的针对构件的坐标系统6普遍性6.1概述6.2基准点的规定6.3功能范围的规定1应用范围和用途本标准适用于在所有产品生成阶段零部件或总成的标注尺寸和制造和控制,为了·毫无例外地在制造和控制范围里的统一定位·保证相同的尺寸标准2理论基础2.1针对构件的坐标系统基准点系统以主导思想为基础,主导思想之一是按照VW01052标准的针对构件的坐标系统。1辆汽车的标注尺寸利用总坐标系统(汽车数学坐标系统)来实现,其原点可规定在汽车前桥高度的中心点(参见VW01059第1部分,VW01052是汽车坐标系统的有约束力的参照标准),图1。VW01055:1996-12共13页第2页从该坐标系的3个轴出发,可撑开与轴平行的网络线,这些网络线按100mm的距离从理论上穿透汽车。这些网络线用于找到汽车上的全部基准点,也就是说,它们帮助确定汽车的每个构件都在其应在的位置。即使是标注尺寸也可借助于这些网络线来完成。针对构件的基准系统可以基准点系统为基础。构件基准系统的原点可通过3个基准平面的交点来定义。基准面可通过在构件上定义的RPS主接收面来构成。对于若干零部件装配的总成,这些零部件之间要规定公差。在装配以后,该总成可通过共同的与构件有关的基准系进行描述。这个基准系通过接受现有基准系的1个或者通过从现有基准点中新生成的基准系来构成。新基准系的规定遵循总成的功能。2.2基准点系统接收的标准值规格/标准值标记多次应用的精度要求很高的接收孔必须设计得相当稳定。通常情况下,必须应用按照表格1和表格2的标准值数值。在RPS平面里钻孔时,必须注意支承面的充分确保过程安全的数值。标明的尺寸必须与轴平行地投影到构件上。表格1:推荐的标准值其他标准值数值参见VW01077VW01055:1996-12共13页第3页表格2推荐的标准值其他标准值数值参见VW0107833-2-1法则每个刚性体在三维空间里具有6个自由度,3个转换器的自由度平行于基准系的轴和3个转子的自由度绕轴旋转,参见图2。VW01055:1996-12共13页第4页为了明确规定支撑1个非旋转对称体,这个非旋转对称体必须在所有6个可能的运动方向上定位。3-2-1法则预先考虑此类明确的定位。定位规定主接收孔的分布:例如3个接收孔在z方向上2个接收孔在y方向上1个接收孔在x方向上实施此法则借助于下面的图示就变得很清楚,参见图3。z方向上的3个接收孔限制3个自由度,z方向上的平移和绕x轴和y轴旋转限制3个自由度。圆孔里的销钉防止平行于x方向和y方向的轴的移动,而长孔里的销钉则最终防止绕z轴的旋转,参见图3。本法则同样适用于任何其他的刚性构件,即使构件在其结构中达到高得多的复杂程度也是如此。对于其元件通过关节或导向器互相连接的刚性体系统,需要通过附加的主接收孔来实现多于6个自由度的定位。对于非弯曲刚性的构件必须按照RPS(基准点系统)的着眼点,定义支撑构件的附加支承位置。RPS(基准点系统)1应是束缚大多数自由度的一点。4名称和图纸表示4.1RPS(基准点系统)名称所有RPS(基准点系统)的点都必须吸纳进零件图中。名称划分成VW01055:1996-12共13页第5页·主接收点=大写字母→H=孔→F=平面→T=从2个支承点中求平均理论点·支承点=小写字母→h=孔→f=平面→t=从2个支承点中求平均理论点·接收类型→接收孔=标记字母H,h→平面/棱边/球体/尖端=标记字母F,f→理论点=标记字母T,t·定位方向=小写字母→x,y,z用于平行于网格的符合构件需求的基准系→a,b,c用于旋转的符合构件需求的基准系名称举例:每个零件和每个总成的编号以RPS1点开始。4.2图纸表示图纸表示按照有效的图纸标准进行。RPS平面必须利用十字阴影线进行标记。如果尚没有零件图,则必须应用RPS尺寸图FE5151)。只要有零件图,就可把RPS尺寸图的数据说明直接吸纳进图纸中或者吸收进重复文字NO-F232)里和在此图纸中具有约束力。4.3无独立图纸(o.Z.)的构件或总成的处理方法VW01055:1996-12共13页第6页无图纸的构件的RPS点必须通过位置数据说明或零件号数据说明来标明。对于第1部分有图纸,而第2和第3部分无图纸,参见图4。5标注尺寸和规定公差5.1概述尺寸和公差登记可以直接在图纸上或通过表格进行,参见图5。标注构件的尺寸一般从基准系的原点进行。有公差的形状尺寸和功能尺寸必须始终有1个到基准系原点的基点。举例:在1组孔之内,各个孔可互相标注尺寸。这组孔跟基准面的位置可标注尺寸。主接收孔跟汽车坐标系/基准系的位置无公差地处在定位方向上。原点/基准点在图纸中或表格里要看得到。如果有2个或3个定位方向聚集在1点,则必须根据孔或平面分别标注公差。在这种情况下,在表格里平面必须低一些安排一行字。在这里公差区里的平面已置零。在孔已置零的这一行里必须用水平线条标记平面的公差区域,参见表格图5。支承点的公差必须相应地确定要求。5.2平行于网格的符合构件需要的坐标系统基准系的原点可利用平动在总汽车网格中无公差地确定,参见图5。_____________________________________________________________________1)在KVS(设计数据管理系统)中在FE0000515条目下存储2)在KVS(设计数据管理系统)中在NOF000023条目下存储VW01055:1996-12共13页第7页5.3旋转的符合构件需要的坐标系统在旋转的基准系中,必须把理论旋转角标注到RPS尺寸图FE5151)中,或者在图纸表格中标明重复文字内容NO-F232)。如果有若干格旋转角,则必须摘引角度数据说明并因此引用旋转图纸的顺序。在表格中,必须在角度登记处采纳“参见图纸”字样。基准点的位置可通过汽车总坐标系中它的x坐标,y坐标,z坐标来确定。围绕x轴,y轴和z轴的旋转角可用数学上的正值或负值进行登记。正值的角可标明逆时针方向,负值的角则标明顺时针方向。在坐标系中,水平轴可归入0度角。公称尺寸和公差可按a值,b值,c值标明在RPS表格里。RPS各点的定位方向可标明在表格里和/或按a值,b值,c值标明在图纸里,例如RPS1HabFc,参见图6和图7。1)参见第6页2)参见第6页VW01055:1996-12共13页第8页VW01055:1996-12共13页第9页VW01055:1996-12共13页第10页6普遍性6.1概述RPS(基准点系统)的任务是拟定保证过程安全/能保证过程安全和精确重现的做法,以便得到工作人员调节工作的独立性。普遍使用基准点必须在所有制造过程、安装过程、控制过程和装配过程中实现。对于密闭的功能范围,例如侧围板的油箱盖,与到RPS平面的功能尺寸相联系,允许变换基准点。在确定RPS基准点之前,必须迅速确定零部件和重要总成的功能及其需要的功能公差。在过程开始时建立的基准点必须保留尽可能长的时间。为了避免更改已布置的基准点,可尽可能早地在设计和开发过程中,按照与所有参予制造过程的部门的约定,一起确定这些基准点。基准点必须定位在构件的稳定范围,这些范围在其他开发和/或生产过程中也不会改变。在行驶过程中对车身而言会发生相对移动的构件上的基准点,只能按照3-2-1法则包括到设计位置中。多次在汽车上使用并因此多次对总坐标网格感兴趣的构件上的基准点可以表示在无总坐标关系的技术图纸中。基准点系统同样遵循生产过程、功能范围和战略质量目标,例如奥迪特检验,过程能力等。6.2基准点的确定在引进基准点时,必须注意网格的平行性(孔和平面),而对于旋转的系统则必须注意跟基准面的平行性。RPS基准点必须按工模具顺序制作,按工模具顺序可达到最大的尺寸精度。基准点必须尽可能地按照标准化的几何方法设计(孔,平面),这些基准点在个别情况下必须进行定义。如果没有孔可以布置到构件中,那么就必须选择确定基准点的平面或棱边。对于COP(验收零件)零件(验收件),可在总成中求得各个基准点的位置。VW01055:1996-12共13页第11页6.3功能范围的确定在汽车错综复杂的部分范围上,例如像仪表板,应用RPS就要求1种布局,这种布局进入开发系统和设计系统和把所有部件、零件和总成联系在一起。在看得到的和遮盖范围的所有构件均属于功能范围,这些构件利用其功能点对其周围的相邻零部件产生直接影响。基准平面的确定与1个构件到其相邻零部件的空间几何位置关系有关。对1个功能范围而言,基准面是相同的,也就是说,构件或构件组和相邻零部件具有相同的出发基础,参见图8。VW01055:1996-12共13页第12页VW01055:1996-12共13页第13页
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 gaoyue0911
gaoyue0911
本文标题:VW01055-21-基准点系统
链接地址:https://www.777doc.com/doc-4556925 .html