您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 工程监理 > 1:500航测技术设计书
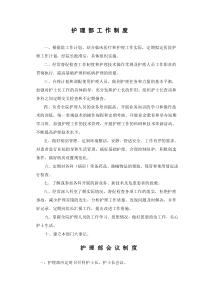
1河北泊头市1:500航空摄影测量设计书一、任务来源与地理概况“数字泊头地理空间框架建设”项目建设将紧密结合泊头市特点,以满足泊头市委、市政府及政府各部门信息化工作为基础,以城市管理和领导科学决策需求为出发点和落脚点,开展数字泊头基础建设。“数字泊头地理空间框架建设”项目的总体目标是:通过大比例尺地形图、数字航空正射影像图、三维建模、地名地址等基础数据采集,以“三维建模”软件技术和计算机网络技术等为支撑,建立泊头市多尺度、多分辨率、多种类的城市空间数据基础体系,构建统一的、权威的城市地理空间基础平台,促进地理信息资源的充分利用,推动城市信息化进程,实现信息资源共享,从而为市政府、企业和社会公众提供高质量的基于空间位置的应用服务。随着“数字泊头地理空间框架建设”项目的启动,2016年5月通过招投标的方式确定河北省第二测绘院为中标单位。基础数据的准备是项目建设的前期工作,根据“数字泊头地理空间框架建设”项目工作内容及泊头市国土资源局对项目的工作安排和技术要求,编制了本项目控制测量、1:500地形图测绘及地名地址调查技术设计书,作为本项目实施的作业依据。二、现有控制资料测区内有高等级平面控制点共有5个,分别为国家B级控制点1个:1149、国家C级控制点4个:C144、C152、C161、C164。经检核,已有控制点精度良好,可以作为本次二等、四等平面控制网的起算点。测区内有国家二等水准点13个:II沧沉121、II沧沉122、II沧沉123、II沧沉47、II沧沉46-1、II沧沉16、II沧沉15、II沧沉14、II沧沉9、II沧沉13、II沧沉48、II沧沉49、II高铁26,经检核,已有水准点精度良好,可以作为本次四等水准网的起算点。2坐标系统:平面坐标系统采用2000国家大地坐标系,中央子午线为117°,投影面为参考椭球面。高程系统:1985国家高程基准。三、作业技术依据1、《无人机航摄安全作业基本要求》CH/Z3001-20102、《无人机航摄系统技术要求》CH/Z3002-20103、《低空数子航空摄影测量内业规范》CH/Z3003-20104、《低空数字航空摄影规范》CH/Z3005-20105、《数字航摄仪检定规程》CH/Z8021-20106、《全球定位系统(GPS)测量规范》(GBT18314-2009);7、GB/T20257.1—2007《国家基本比例尺地图图式第1部分:1:5001:10001:2000地形图图式》8、《1:5001:10001:2000地形图图式》(GBT20257.1-2007);9、《数字测绘产品检查验收规定和质量评定》(GB/T18316-2001);10、《1:5001:10001:2000比例尺地形图航空摄影规范》(GB/T15967-2008);四、作业流程4.1平面坐标系统平面坐标系统采用2000国家大地坐标系,中央子午线为117°,投影面为参考椭球面。4.2高程系统采用1985国家高程基准。4.3成图比例尺及图幅规格1、成图比例尺为:l∶500。2、成图规格(1)地形图基本等高距为0.5m,高程注记点注至0.Olm。(2)图幅分幅:地形图使用正方形分幅,图幅尺寸为50cm×50cm。自由图边按3照测区范围可不测绘满幅。(3)图幅编号:地形图编号按图廓西南角坐标公里数编号,X在前Y在后,小数点后保留2位,中间加短线连接,例:××××.××-×××.××,图名取本图幅中较大地名或单位名称,不易确定图名的可不注记。4.4图根控制测量1、图根控制点布设要求⑴测区内图根点可选择标志性地物周边易保存的地方,如固定的水泥台上等,采用刻石、喷涂、钉桩的方法制作图根点。⑵对于硬化路面采用打钢钉作为标志。⑶所有图根控制点都至少有一个通视点。⑷图根点布设的密度根据测区内地形变化程度而定,以满足全野外碎部测图要求为准。⑸图根点点号均以“T”为标识,后缀用自然流水号进行编号命名。例如:T1、T102等。T表示图根控制,1、102表示图根点序号。2、图根控制点测量测量采用的GPS接收机,其标称精度至少应满足如下要求:水平标称精度:±10mm+2ppm;垂直标称精度:±20mm+2ppm。⑴采用VRS时具体作业方法如下:图根控制测量前,先利用均匀覆盖整个测区范围的四等平面控制点及四等水准点,求取出针对本测区的严密转换参数。求取转换参数要求如下:选用的四等平面控制点2000国家大地坐标系坐标成果导入到GPS接收机的随机软件中,选择利用VRS测量的成果和对应输入的已知四等平面控制点成果进行匹配校正,执行平面及高程校正,求取测区转换参数。执行完点校正计算后的平面坐标转换残差应不大于±2cm,高程拟合模型内符合中误差应不大于±3cm。计算转换参数的已知点应均匀分布于测区内及测区周边。4⑵VRS测量技术规定图根点测量采用VRS进行网络RTK测量,不需要架设基准站,但应保证接收机接收的VRS基站信号良好。1)观测时流动站的卫星状态应符合下表规定:观测窗口状态截至高度角15°以上的卫星个数PDOP值良好≥6<4可用5≥4且<6不可用<5≥62)每次开始测量前还应选取至少一个高等级己知点(未参与点校正的已知点)进行检核。在测量中的不同时段、不同区域多检测已知点。3)检测已知点的平面坐标较差不应大于5cm,高程较差不大于10cm,选取两个以上已知点进行检核时,高程中误差不大于5cm。4)图根控制点观测两测回,测回间应对仪器进行初始化,测回间的时间间隔应超过60秒,每测回观测值应在得到RTK固定解且收敛稳定后开始记录,测回间的平面坐标分量较差不应大于2cm,垂直坐标分量较差不应大于3cm。两测回结果取平均值作为图根控制点测量最终成果。图根测量的平面坐标和高程记录至0.001m。4.5、像控测量本项目像控测量包括航空摄影像控测量和卫星影像像控测量两个部分。4.5.1航空摄影布点本项目1:500航空区域采用IMU/DGPS数码航空摄影方式,像控点布设只需在摄区拐点布设控制点、中间区域适当布点即可。4.5.3像片刺点航空影像像控点布设可不考虑像片重叠度条件,但所有像控点要刺在地面明显清晰、易于判读的地方,如斑马线角、道路交叉线、坪角等,刺点要能满足平高点位置的要求。54.5.4像控测量本项目像控点测量可采用CORS进行施测,亦可采用GPS静态测量模式。像控测量平面高程精度均不能超过±0.1米。4.6影像数据预处理与空三加密4.6.1影像数据预处理(1)依据相关技术规范对影像数据进行检查,重点检查旋偏角、重叠度是否满足要求,云量是否符合要求,是否存在航摄漏洞,等等。(2)格式转换。将原始航片影像数据转换为空三软件支持的TIF格式。(3)影像旋转。为了方便像片连接,以北方向或西方向为正方向,对原始影像数据进行旋转。4.6.2空三加密(1)影像经预处理后进行空三加密,空三加密利用VirtuoZoAAT3.4+PATB软件,采用光束法区域网平差。(2)空三测量内定向误差不得大于0.05mm,相对定向残余上下视差△q:平地、丘陵地标准点不应大于0.02mm,检查点不应大于0.03mm;山地、高山地标准点不应大于0.03mm,检查点不应大于0.04mm。(3)绝对定向后,基本定向点残差、多余控制点的不符值及公共点的较差不得大于下表规定:基本定向点残差、多余控制点的不符值及公共点的较差单位:米地形类别基本定向点残差多余控制点不符值区域网间公共点较差平面高程平面高程平面高程平地0.3-0.5-0.8-丘陵地0.30.260.50.40.80.7山地0.40.60.71.01.11.6高山地0.40.90.71.51.12.4注:(1)基本定向点残差为加密点中误差的0.75倍;6(2)多余控制点不符值为加密点中误差的1.25倍;(3)区域网间公共点较差为加密点中误差的2.0倍。(4)加密点中误差以全区或者单个区域为单位按下面的公式进行估算:mq=n][mg=ndd2][式中:mq----控制点中误差,m;mg----公共点中误差,m;△----多余野外控制点不符值,m;d----相邻航线或者相邻区域网之间公共点较差,m;n----评定精度的点数。(5)平面坐标和高程取至0.001米。(6)加密点一般要选刺在3个标准点点位附近,当遇到特殊情况需要增加连接强度时,可增选连接点的数量。所选点位构成的图形以大致成矩形为宜,点位高差相差不宜过大,同时要照顾DEM和DOM成图范围。(7)对于连接点自动转点的效果不太理想的情况,在作业中首先需要手动添加连接点,保证在标准点位处有一至三个连接点。(8)航拍时大面积落水区域的处理,在影像落水区域的边上按间隔1-1.5cm量测连接点,使落水区域附近的像点网有一个稳固的边界,从而减少落水区域的影像。4.7主要精度指标1、二、四等GPS控制网主要精度指标如下:等级相邻点间平均距离(㎞)固定误差a(㎜)比例系数误差b(1×10-6)最弱边相对中误差异步环或附合路线变数二等9≤5≤21/120000≤6四等2≤10≤51/45000≤1072、四等水准测量的主要技术指标如下:四等水准测量附合路线长度不超过80㎞,环线周长不超过100㎞;同级网中结点间距离不超过30㎞。主要技术指标如下:等级每千米高差中数全中误差(㎜)测段、区段路线往返测高差不符值(㎜)附合路线或环线闭合差(㎜)检测已测测段高差之差(㎜)四≤±10K20L20R30注:K为测段、区段、路线长度,单位为㎞;当测段长度小于0.1㎞时,按0.1㎞计算;L为附合路线长度;R为检测已测测段长度。3、图根测量主要技术指标图根点相对于起算点点位中误差不得大于图上0.1mm(实地5㎝)。图根点相对于图根起算点的高程中误差不得大于测图基本等高距的1/10(实地5㎝);4、地形图(平面)主要技术指标地形图碎部测量时,测站点相对于邻近图根点的点位中误差不得大于图上0.3mm(实地15cm),高程中误差平地不大于1/10基本等高距(5cm)。地物点相对于邻近图根点的点位中误差不得超过图上0.5mm(实地25㎝);邻近地物点间距中误差不得超过图上±0.4mm(实地20㎝)。5、地形图高程主要技术指标高程采用全野外实测,城市建筑区地形图高程注记点相对于邻近图根点的高程中误差不得大于±0.15m;其他地区的高程注记点或等高线插求点的高程中误差,平地应小于等于1/3基本等高距(16cm)4.8DEM制作DEM制作技术路线DEM的制作过程为:创建立体模型-生成核线影像-影像自动匹配-匹配点编辑8-DEM自动生成-DEM编辑-裁切和分幅。DEM制作工艺流程如下图所示:94.9立体模型创建立体模型创建主要是利用空三加密的结果,采用全自动空三数据导入方式,在VirtuoZoNT数字摄影测量工作站上采用批处理的方法完成各个立体模型的建立。4.9.1模型定向与核线影像生成模型定向包括内定向、相对定向和绝对定向三步。由VirtuoZoAAT做的空三加密工作,导入空三成果时,内定向参数已由软件导入,所以在VirtuoZo工作站中不再需要重新做内定向。在VirtuoZo标准版主界面上,单击处理-模型定向-相对定向菜单项,进入相对空三成果导入自动创建立体像对相对定向生成核线影像绝对定向影像自动匹配匹配结果编辑DEM自动生成DEM编辑DEM分幅与裁切特征点、线采集构造三角网内插DEM已有地形图数据整理DEM分幅图成果10定向界面后定义核线范围,点击自动相对定向。相对定向中误差必须满足精度要求。空三工程导入后,要检查内外方位元素是否正确。外方位元素不正确的像对,需运行绝对定向。绝对定向中误差必须满足精度要求。模型定向完成后运行程序自动生成核线影像。在立体环境下对核线影像进行检查,主要检查核线影像立体是否正确、是否清晰、是否存在模型差等。4.9.2影像匹配和DEM生成生成核线影像后,在VirtuoZo主界面上单击处理-影像匹配,软件将对打开模型自动进行影像匹配。自动匹配完成后,单击处理-匹配结果编辑进入匹配编辑模块,对当前立体模型的自动匹配结果进行编辑。显示视差曲线和匹配
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码









 じあまだ
じあまだ
本文标题:1:500航测技术设计书
链接地址:https://www.777doc.com/doc-4817881 .html