您好,欢迎访问三七文档
当前位置:首页 > IT计算机/网络 > 其它相关文档 > 避障小车报告(简单程序)
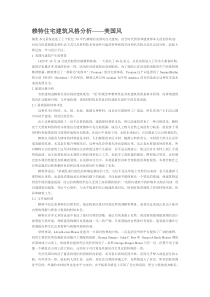
武汉理工大学开放性实验报告项目名称:避障小车实验室名称:612-36创新实验室学生姓名:欧阳飞,张思成,秦淮,潘浩,赵唯时,崔永新创新实验项目报告书实验名称避障小车日期2011/3/13姓名欧阳飞,张思成,秦淮,潘浩,赵唯时,崔永新专业通信、自动化、机电学院一、实验目的(详细指明输入输出)在硬件和软件算法的保证下,使得小车能在前进过程中避开前面的障碍继续前进。主要包括传感器的使用和躲避算法的实现。二、实验原理(详细写出理论计算、理论电路分析过程)ENA6ENB11IN15IN27IN310IN412OUT12OUT23OUT313OUT414ISENA1ISENB15VS4VSS9GND8U1L298NC2C1+5V+12VD1D2D3D4D5D6D7D8C4C3+5V+12VLED1R112PWMA12Power5V1234R2R3R4LED2LED3LED4R5R6R71KR812PWMB12Power12V12M112M21234TLP521-11234TLP521-21234TLP521-31234TLP521-4+5V+5V+5V+5VIN2IN3IN4IN1A/A/BB芯片供给电源驱动电机电源控制信号输入端PWM信号输入A组PWM信号输入B组使用直流/步进两用驱动器可以驱动两台直流电机。分别为M1和M2。引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。(如果无须调速可将两引脚接5V,使电机工作在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。(如果信号端IN1接低电平,IN2接高电平,电机M1反转。)控制另一台电机是同样的方式,输入信号端IN3接高电平,输入端IN4接低电平,电机M2正转。(反之则反转),PWM信号端A控制M1调速,PWM信号端B控制M2调速。可参考下图表:电机旋转方式控制端IN1控制端IN2控制端IN3控制端IN4输入PWM信号改变脉宽可调速调速端A调速端BM1正转高低//高/反转低高//高/停止低低//高/M2正转//高低/高反转//低高/高停止低低///高使用D触发器进行边沿检测的传感器电路也是让发光管亮暗交替,但亮的时间很短,电流很大,亮度很高,把接收端门限调的很高,然后用D触发器进行边沿检测。这样可以屏避外界一般强度光(可以是高频的)的干扰,而耗电不会增加。但如果使用简单的比较型电路,加大电流就会增大功耗,甚至烧毁发光管。下图是一个成品光电开关,就是光电管=两级交流放大=CD4013检测这种方式的,CD4013的另一个单元D触发器作方波振荡源,通过驱动电路带动LED。可以看出,LED的限流电阻是20欧,短时间通过LED的电流很大。红外遥控有发送和接收两个组成部分。发送端采用单片机将待发送的二进制信号编码调制为一系列的脉冲串信号,通过红外发射管发射红外信号。红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。为了减少干扰,采用的是价格便宜性能可靠的一体化红外接收头(HS0038,它接收红外信号频率为38kHz,周期约26μs)接收红外信号,它同时对信号进行放大、检波、整形得到TTL电平的编码信号,再送给单片机,经单片机解码并执行去控制相关对象。红外接收头输出的原始遥控数据信号,正好和发射端倒向.也就是以前发射端原始信号是高电平,那接收头输出的就是低电平,反之.三、实验步骤(记录实验流程,提炼关键步骤)1、车体设计2、电源电路3、红外避障模块4、小车程序设计5、避障测试与调试四、实验结果(详细列出实验数据、protel实际电路图和结论分析)1、车体选用本设计采用的小车为履带式车轮,经实验证明,该方式使小车运动平稳,转向灵活,可以绕自身中轴线回转,可以原地转向从而顺利躲避障碍物。我们设计的履带由驱动轮、承重轮、紧张轮和履带组成。移动时是由驱动轮驱动履带向前或转向运动的。在行进过程中,当小车需要直行时,两个电机以相同速度同时转动,小车沿直线行驶;当需要小车向右转向时,使右边电机停止转动,左边电机继续转动,则小车右转,若电机一直保持这种状态,小车原地打转。左转方式原理与右转相同。如图3为小车履带示意图:接电机接电机2、用STC8052做主芯片,用L298N做主控电路采用一般的单片机系统控制电路,主要由:电源电路、晶振电路、复位电路,及外部中断输入电路组成,电路结构简单,性能稳定,是单片机系统控制普遍采用的硬件电路。为使小车运行更加灵活可靠,我们采用了后轮用两个直流电机分别驱动,前轮采用自制的万向轮的驱动方式,采用L298双通道直流电机驱动芯片作为主控电路,将红外传感器采集的信号,经单片机处理后,控制驱动电机的PWM的占空比和方向。3、电源模块采用3节4.2V可充电式锂电池串联共12.6V给直流电机供电,经过7812的电压变换后给支流电机供电,然后将12V电压经7805再次降压、稳压后给单片机系统和其他芯片供电。锂电池的电量比较足,并且可以充电,重复利用。4、红外避障部分1)启动部分遥控器原理利用发射芯片产生一个数据,经高频载波通过红外线发射LED发射出去。接收部分由一个红外线接收模块接收数据经电容滤掉高频载波后,送单片机,与单片机中预存的数据进行比较,如相同而启动主程序运行。运行原理如图2、3所示。图2红外线发射器工作方块图8051单片机38KHZ载波信号AND门信号放大红外线发射二极管发射红外线信号红外线接收模块单片机8051控制红外线信号接收图3红外线接收工作方块图5、小车避障程序#includereg52.h#includeintrins.hsbitP1_4=P1^4;sbitP1_5=P1^5;sbitP1_6=P1^6;sbitP1_7=P1^7;sbitP1_0=P1^0;sbitP1_1=P1^1;sbitP1_2=P1^2;sbitP1_3=P1^3;#defineLeftIRP1_4#defineRightIRP1_5#defineLeftLaunchP1_6#defineRightLaunchP1_7#defineM1AnodeP1_0#defineM1CathodeP1_1#defineM2AnodeP1_2#defineM2CathodeP1_3voiddelay_nms(unsignedinta){unsignedinti;for(i=0;ia;a++);}voidIRLaunch(unsignedcharIR){intcounter;if(IR=='L')for(counter=0;counter38;counter++){LeftLaunch=1;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();LeftLaunch=0;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}if(IR=='R')for(counter=0;counter38;counter++){RightLaunch=1;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();RightLaunch=0;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}}voidForward(void){M1Anode=0;M2Anode=0;M1Cathode=1;M2Cathode=1;delay_nms(1);}voidLeft_Turn(void){M1Anode=0;M2Anode=1;M1Cathode=1;M2Cathode=0;delay_nms(1);}voidRight_Turn(void){M1Anode=1;M2Anode=0;M1Cathode=0;M2Cathode=1;delay_nms(1);}voidBackward(void){M1Anode=1;M2Anode=1;M1Cathode=0;M2Cathode=0;delay_nms(1);}voidStop(void){M1Anode=0;M2Anode=0;M1Cathode=0;M2Cathode=0;}intmain(){intirDetectLeft,irDetectRight;while(1){IRLaunch('R');irDetectRight=RightIR;IRLaunch('L');irDetectLeft=LeftIR;if((irDetectLeft==0)&&(irDetectRight==0)){Stop();Backward();Left_Turn();Left_Turn();}elseif(irDetectLeft==0){Stop();Backward();Right_Turn();}elseif(irDetectRight==0){Stop();Backward();Left_Turn();}else{Stop();Forward();}}}五、问题总结(实验中遇到的已解决和未解决的问题)1、因为时间紧张只完成红外避障程序的调试,其他模块(如其他传感器)将在下面的试验中制作调试2、自己制作的红外模块发生故障3、了解了8051单片机最小系统的电路,L298N电机驱动电路4、完成了避障小车的算法设计
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 cspark
cspark
本文标题:避障小车报告(简单程序)
链接地址:https://www.777doc.com/doc-4971753 .html