您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 工业机器人快换装置的设计与调试
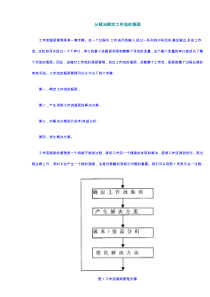
南京信息职业技术学院毕业设计论文作者胡晓东学号21414D11系部机电学院专业机电一体化技术题目工业机器人快换装置的设计与调试指导教师颜玮评阅教师颜玮完成时间:2017年4月1日毕业设计(论文)中文摘要(题目):工业机器人快换装置的设计与调试摘要:进入21世纪后,工业机器人进入到快速发展时期。工业机器人是一种通用性较强的自动化设备,末端执行器则是直接执行作业任务的装置,大多数末端执行器的结构和尺寸都是根据其不同的作业任务要求来设计,从而形成了多种多样的结构形式。通过对工业机器人运行程序的编辑,快换装置能快速有效更换末端执行器,提高工业机器人作业的柔性,为工业机器人在不同作业的应用提供了有利条件。关键词:快换装置;机器人;工业;毕业设计(论文)外文摘要Title:DesignanddebuggingofquickchangedeviceforindustrialrobotAbstract:Afterenteringintwenty-firstCentury,theindustrialrobotintoaperiodofrapiddevelopment.Industrialrobotisakindofgeneralautomationequipment,theendeffectorisadeviceforperformingthetaskdirectly,thestructureandsizeofmostendeffectoraredesignedaccordingtotheirdifferenttaskrequirements,thusformingavarietyofstructuralforms.Byeditingtherunningprogramofindustrialrobot,quickchangedevicecanquicklyandeffectivelyreplacetheendeffector,improvetheflexibilityofindustrialrobots,itprovidesafavorableconditionfortheapplicationofindustrialrobotsindifferentjobs.Keywords:Quickchangedevice;robot;industry;目录1引言............................................................12工业机器人的发展现状............................................12.1我国工业机器人的发展现状......................................12.2国外工业机器人的发展现状......................................13工业机器人快换装置的工作原理及其基本组成........................24工业机器人快换装置的电路气路整体结构............................35工业机器人的运行程序............................................55.1运行环境......................................................55.2动作流程......................................................65.3指令..........................................................65.4程序编辑与调试................................................76快换装置的应用................................................106.1轴孔装配机器人工作站运行程序................................106.2奖牌包装机器人工作站运行程序.................................11结论............................................................14致谢............................................................14参考文献........................................................1411引言自从美国研制出第一台可以使用的示教型工业机器人以来,国际上对工业机器人的开发和应用已经有50年的历程。工业机器人是一种具有自动控制功能的机器,通过对其运行程序的编辑,工业机器人能够完成各种作业,末端执行器则是一种直接执行作业任务的装置。通常末端执行器是为特定的用途而专门设计的。如今已开发出喷漆、装配、焊接、搬运、注塑、码垛等工业机器人。学校Estun工业机器人学院中的工业机器人需要夹持器安装末端执行器,如果能够设计相关的快换装置,则可为工业机器人多种作业提供较好的展示平台。2工业机器人的发展现状2.1我国工业机器人的发展现状我国在“七.五”科技攻关计划中开始尝试发展工业机器人技术,由于当时经济实力的制约,发展缓慢,研究和应用水平也比较低。为了实现高技术发展与我国经济建设相连接,863计划国家对机器人技术的发展做出了重要战略调整,明确把特种机器人与工业机器人及其应用工程并重,通过工业机器人的应用带动关键技术和基础研究的发展。从机器人的销售量上来看,国内机器人市场增长非常迅速。我国的智能机器人发展也取得了不少成果:相继开发出了点焊机器人、摘果机器人、下棋机器人、伐根机器人等机种;在基础技术的开发应用上有了很大的突破。通过科技攻关,目前已基本掌握了机器人操作机的设计制造技术,但是在多传感器信息融合控制技术、机器人化机械等关键技术领域的开发应用方面才刚刚起步,需要在原有的基础上攻坚克难,才能形成与系统配套可供实用的技术和产品。如今工业机器人在社会生活的各个方面的应用范围越来越广,如迎宾业务推广、前台问询机器人、营业大厅的机器人导购宣传员、画像机器人、跳舞机器人等,因此对机器人的需求也越来越大。所以要加快攻克工业机器人的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进机器人产业快速化发展。2.2国外工业机器人的发展现状2工业机器人是现代制造业重要的自动化装备,它囊括了电子、计算机、机械、传感器、人工智能等先进技术。目前,国际上具有影响力的,著名的工业机器人供应商有安川、松下、AmericanRobot、KUKA、CLOOS、瑞典ABB等公司。美国是世界上机器人强国之一,基础雄厚,技术先进。上世纪80年代美国制定和采取了相应的政策和措施,一方面鼓励工业界发展和应用机器人,另一方面制定计划、提高投资,增加研究经费,把机器人看成美国再次工业化的特征,使美国的机器人迅速发展。随着各大厂家应用机器人的技术成熟,很快占领了机器人市场。德国,不得不提它的支柱产业汽车,德国作为工业强国,工业自动化水平都久负盛誉,强大的工业实力为其工业机器人的发展夯实了基础。库卡公司是德国最为知名的工业机器人生产商,是全球顶级工业机器人制造商之一。其产品主要应用于汽车、物流、食品、医药、铸造等方面。近几年德国的工业机器人在人机交互、机器视觉、机器互联、服务机器人等方面发展迅速。近些年国外机器人领域发展趋势:工业机器人的性能不断提高主要表现在三个方面即高速度、高精度、高可靠性;机械结构向模块化、可重构化发展;工业机器人控制系统从单一系统开始向基于PC机的控制器方向发展;机器人语言研究发展较快,语言类型多,应用广。3工业机器人快换装置的工作原理及其基本组成工业机器人有点焊、弧焊、装配、喷漆等机器人,主要用于现代化的工厂和柔性加工系统中。下面简单的介绍一下码垛机器人是怎么工作的:首先把托盘从托盘库中调出,放到预先设置好的位置,只要货物输送机旁的传感器感应到货物,码垛机器人就会根据系统预设的程序把堆放好的货物抓起,并依次按照一定的顺序排列在托盘上,不断的重复上述过程,直到把托盘装满,货物装满后,托盘输送机就会把托盘运送到下一个需要工作的地方。工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机器,通过快换装置可以更换不同的末端执行器,提高工业机器人的工作效率。如图2所示为末端执行器的自动换接系统,快换装置通常由主盘和工具盘组成,主盘安装在工业机器人手腕上,工具盘与末端操作器连接。快换装置的释3放和夹紧可以由主盘和工具盘通过气动的形式来实现。当操作器处于释放状态时,主盘上的释放口开始供气,产生的推力使活塞杆处于下压状态。钢球收于内侧。当操作器需要夹紧时,主盘上的夹紧口开始供气,主盘内活塞拉力和内部弹簧使活塞杆回拉,并由钢球将工具侧定位夹紧套按压在着座面上。排气口在需要时,可进行气体的排放,保证气路的畅通。而检测口,则与压力开关相接,检测快换装置的连接情况。图1快换装置的工作状态4工业机器人快换装置的电路气路整体结构工业机器人快换装置由主盘和工具盘组成,主盘安装在工业机器人手腕上,工具盘与末端执行器通过气动的方式实现连接。快换装置的内部结构比较复杂,通常有弹簧、钢球,保证其连接的精度,主盘和工具盘也通过气动的形式相连接。主盘上有释放口、夹紧口、排气口和检测口以及气爪气口,通过给不同的气口通气,可使其发生相应的动作。根据图2安装相应的气阀,安装气路之前关闭气泵,选择正确尺寸的气动接口。电磁阀的气管通过安装板内层气源及执行器相连,使系统气管整齐。其气管不要交叉扭曲,防止管路受阻。不仅要对其工装进行设计还要对其气路、电路进行设计和连接。根据气路动作的触发信号,选用电磁阀,电磁阀的信号来自于工业机器人的控制器,将此类I/O信号写入示教器中,进行后续程序编辑的变量。其中输入信号有:压力开4关、气爪上的磁性开关,输出信号有:4个电磁阀位置信号,电机触发信号,如图3所示。连接后,气路和电路运行良好,可进行相应的机器人程序调试运行。图2快换装置的气路电磁阀上的电磁信号来源于机器人控制器,信号电压24V。辨识I/O模块24V和0V端口,注意电磁阀信号的正负极及在示教器中信号的变量。图3输入控制器模块IO信号注意事项:1)安全操作,在连接电路或气路前,保证关闭电源和气源。2)紧固器件时,选用合适的工具,使用力不能过小,也不可过大。3)安装系列阀前,理清安装顺序。55工业机器人的运行程序5.1运行环境1.轴孔装配机器人工作站这组工业机器人由一台六轴机器人本体,伺服箱,工作台和工具架组成。我们机器人需要将小型圆柱体放到工具台上的小型料盘里,然后更换末端执行器,使用带有电动式的打磨机打磨小圆柱体。首先,启动机器人伺服,将机器人首先运行到工具架上夹持末端执行器的正上方,并缓缓下降,连接夹持式末端执行器,行走到小圆柱体的上方,开始夹持小圆柱体,接着运行到料盘A上方,释放小圆柱体到料槽里。然后,机器人运行到工具架上夹持式末端执行器的上方,缓缓下降,并且释放末端执行器。然后运行到电动式末端执行器的上方,连接电动式末端执行器,运行到料盘上方小圆柱体处,开始打磨小圆柱体的上方。打磨结束后,将机器人运行到工具架的电动式末端执行器的上方,缓缓下降,释放电动式末端执行器。然后,在更换夹持式末端执行器,将小圆柱体夹持到料盘B中。在我们这个轴孔装配的工作站中,我们在进行对物料小圆柱体的搬运和加工这一步骤中变化使用了末端执行器,首先使用夹持式末端执行器,夹持式末端执行器对圆柱体,方形块等等能够很好的进行移动,然后,我们在其运行的过程当中,变换末端执行器,使用了带电动式的小磨头,从而对小圆柱体进行打磨的作业,这其中,就用到了我们的快换装置,从而可以是机器人在很短的时间内完成多功能作业。2.奖盘包装机器人工作站这组是一整套工业
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码







 清都山水郎
清都山水郎
本文标题:工业机器人快换装置的设计与调试
链接地址:https://www.777doc.com/doc-5134251 .html