您好,欢迎访问三七文档
当前位置:首页 > 办公文档 > 其它办公文档 > 自动化专业英语(翻译)P2U6教学课件
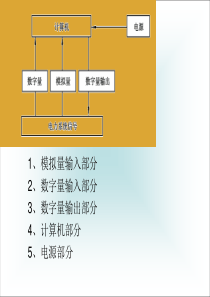
自动化专业英语教程教学课件July28,2007Email:wanghongwen@hebut.edu.cn第二部分第六单元课文A可控性,可观性和稳定性A可控性,可观性和稳定性1.课文内容简介:主要介绍《现代控制理论》中可控性,可观性的概念、广义上连续系统稳定性的概念和定义、用李亚普诺夫第一方法和李亚普诺夫第二方法确定非线性自激系统的稳定性等内容。2.温习《现代控制理论》中可控性,可观性、李亚普诺夫第一、第二方法等内容。3.生词与短语P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性state-controllableadj.状态可控(制)的observableadj.可观测的dualadj.双的,对偶的,孪生的fundamentaln.基本原理multivariableadj.多变量的guaranteev.,n.保证,担保generalizev.一般化,普及trajectoryn.轨迹Liapunov李亚普诺夫vorticesn.vortex的复数,旋转体(面)convergev.集中,汇聚,收敛asymptoticallystable渐近稳定boundv.限制locallystable局域稳定globallystable全局稳定P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性revealv.显现,揭示comprisev.包含violentlyadv.激烈地straight-forwardadj.直截了当的,简单的eigenvaluen.特征根autonomousadj.自治的,自激的decouplev.解耦,退耦portraitn.描述conjunctionn.结合identifyv.确认,识别,辨识Jacobianmatrix雅戈比矩阵positivedefinite正定incidentallyadv.偶然地P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性4.难句翻译[1]Sincecompletestatecontrollabilitydoesnotnecessarilymeancompletecontroloftheoutput,andviceversa,completeoutputcontrollabilityisseparatelydefinedinthesamemanner.因为状态完全能控性不一定意味着输出的完全可控,而且反之亦然,所以输出完全能控性以类似的方式单独定义。[2]Onlylocalasymptoticstabilitywithrespecttotheestablishedequilibriumstatecanbeguaranteedforlinearanalyses.只有相对于(系统)建立的平衡状态的局域渐近稳定才能保证线性分析(可以应用)。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性5.参考译文A可控性,可观性和稳定性可控性和可观性一台装置(或系统)如果能找到一个无约束控制矢量u(t)在有限的时间间隔内将任意初始状态x(t0)转化为任意其它状态x(t),则这台装置(或系统)是完全可控的。因为状态完全能控性不一定意味着输出的完全可控,而且反之亦然,所以输出完全能控性以类似的方式单独定义。如果可从有限的时间间隔内的输出c(t)的信息中确定状态x(t),则装置是完全可观的。可控性和可观性的对偶概念是多变量装置控制的基础,特别是最优控制。完全能控性保证无约束控制矢量的存在,因而存在一个可控制器。但是,完全能控性并没有告说明如何设计控制器,也没有保证物理上可实现的控制矢量或控制器的存在。完全可观性保证从输出信息中可确定状态信息或装置的内部特性。然而,完全可观性并不保证输出变量是物理可测的。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性通过讨论一个有n个状态变量因而有n个暂态响应的广义n阶装置就可解释这两个概念的意义。控制变量数用m表示,输出变量数用p表示。在实际系统中我们期望m和p小于n并且越少越好。如果装置不是完全能控的,将会有暂态响应(状态变量)不能由一个或多个控制变量用任何方式进行控制;这些暂态响应由控制矢量进行衰减。如果装置不是完全可观的,将有不确定的暂态响应;这些暂态响应由输出矢量进行衰减。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性如图2-6A-1所示,一台装置可分成四个子系统。因为仅有第一个子系统A是能观能控的,具有输入-输出关系,所以它是唯一一个可用传递函数或传递函数矩阵表示的子系统。相反,这台装置的传递函数或传递函数矩阵并没有反映子系统B和D的动态特性也没有对子系统C和D的特性进行控制。图2-6A-1一台装置的四个子系统P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性例如,如果子系统B的暂态响应对任何控制变量反应强烈,从输出变量中得不到这些特性的信息。子系统C中不受欢迎的暂态响应会影响到输出,但控制变量对此无能为力。通过适当地增加控制变量可使这台装置完全可控。然而,要使这台装置完全可观,工作会更加困难,这里不作进一步讨论。稳定性离开可控性和可观性的问题,我们需要讨论广义上连续系统稳定性的概念和定义。定结构线性系统的稳定性比较简单,因为稳定性仅取决于系统本身的特性而与系统的初始状态、输入的幅值和类型无关。有一种有限的(唯一的)平衡状态,如果在扰动的作用下,系统能返回到这个平衡状态,我们称这个系统是稳定的。稳定性由特征根的位置确定(特征方程的根),并且有许多种方法确定特征根的位置。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性对变结构线性系统,特别是对非线性系统,稳定性不仅取决于系统本身的特性,也取决于系统的初始状态、输入的类型和幅值。此外,可能有不止一个平衡状态。要讨论这些系统的稳定性,附加的定义和判据是必需的。我们将仅讨论自激系统,因为对任意输入情况下的稳定性理论尚未建立。如果离开初始状态的轨迹返回并保持在平衡状态周围规定的区域内,则系统是稳定的。这种稳定性的广义定义通常被认为是李亚普诺夫意义下的稳定性,允许极限环和涡旋环的存在。如果在李亚普诺夫意义下稳定系统的轨迹最终收敛于平衡状态,则系统是渐进稳定的。如果系统仅在初始状态有限的状态空间内稳定,则系统是局域稳定的或叫小稳定。如果系统在整个状态空间内对任意初始状态都稳定,则系统是全局稳定的或叫大稳定。我们喜欢我们的控制系统是渐进稳定的,最好是全局稳定的;如果不是全局稳定的,最好渐进稳定的区域能包含任何预期的扰动。古典控制理论的稳定性是渐进稳定的。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性乍看起来是全局稳定的,但实际上是局域稳定的,因为没有任何一个系统是真正线性的。只有相对于(系统)建立的平衡状态的局域渐近稳定才能保证线性分析(可以应用)。有三种基本方法来确定非线性自激系统的稳定性。一种方法是用一个二阶系统来近似实际系统,在相平面上画出许多条轨迹,检查画出的相位图以确定稳定和不稳定区域。描述函数法与相平面结合可用来寻找和确定极限环。另一种方法叫作李亚普诺夫第一或间接方法。这种方法首先用雅可比矩阵线性化每一个平衡状态的非线性矢量方程,然后检查相应的特征根以确定局域稳定性。上面提到的两种方法有时合称为李亚普诺夫第一方法。第三种方法叫作李亚普诺夫第二法或直接方法,之所以这样叫是因为这种方法不需解微分方程。这种方法可用于所有类型、任意阶数的微分方程,提供全局以及局域稳定性的答案,因而得到广泛应用。P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性在应用李亚普诺夫第二方法时,要研究的平衡状态转化为状态空间的原点,因此自激系统可用如下方程:平衡状态为xeq=0。李亚普诺夫渐进稳定定理是这种直接方法的本质。定理说的是:如果存在正定标量函数V(x)沿着区域R内的所有轨迹随时间衰减为零,则方程(2-6A-1)所表示的系统在闭合区域R内是渐进稳定的。如果区域R包含所有的状态空间,系统是全局稳定的;否则,系统在有限的区域R内是局域稳定的。标量函数V(x)叫作李亚普诺夫函数。李亚普诺夫函数在区域R内一定是连续的,它的一阶偏导数也一定是连续的。)(xxf(2-6A-1)P2U6AControllability,Observability,andStability第二部分第六单元课文A可控性,可观性和稳定性李亚普诺夫函数是正定的要求指的是对状态变量的所有非零值V(x)大于零并且V(0)等于零。为了保证沿区域R内出发的所有轨迹V(x)衰减到零,dV(x)/dt必须小于零,即,是负定的。如果≤0,它是负半定的,系统仅在李亚普诺夫意义上是稳定的;如果沿着轨迹,系统是渐进稳定的。最后,如果是不定的,则对系统的稳定性不说明任何问题,我们必须试验各种V(x)函数直到证明系统是稳定或不稳定的。另外,稳定系统能保证稳定区域的大小与选择的李亚普诺夫函数有关。)(xV0V(x))(xVP2U6BOptimumControlSystems第二部分第六单元课文B最优控制系统B最优控制系统1.课文内容简介:主要介绍《现代控制理论》中最优控制的基本概念、最优控制系统设计的五个基本步骤、最小化的两种基本方法:动态编程法和变分逼近法等内容。2.温习《现代控制理论》中有关最优控制的内容。3.生词与短语P2U6BOptimumControlSystems第二部分第六单元课文B最优控制系统optimalcontrol最优控制plantn.机器,设备被控对象constraintn.约束条件performanceindex性能指标deterministicadj.确定的lumpedadj.集中的controllabillityn.能控性variationaladj.变化的,变种的observabilityn.能观性admissibleadj.可采纳的,允许的trajectoriesn.轨迹,弹道constantmatrix常数矩阵multistageadj.多级的,多步的quasiadj.近似的linearizationn.线性化suboptimaladj.次优的P2U6BOptimumControlSystems第二部分第六单元课文B最优控制系统4.难句翻译[1]Completecontrollabillityinthemathematicalsenseisanecessarybutnotsufficientconditionfortheexistenceofanoptimalcontrol.在数学意义上,完全能控是最优控制存在的必要条件但非充分条件。[2]…mathematicallythatis.……数学上是如此的。[3]Withtheexceptionofsomelinearplants,thevariationalapproachofPontryag
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 apunk
apunk
本文标题:自动化专业英语(翻译)P2U6教学课件
链接地址:https://www.777doc.com/doc-5184083 .html