您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 产品包装生产线课程设计(方案三)原创,优秀
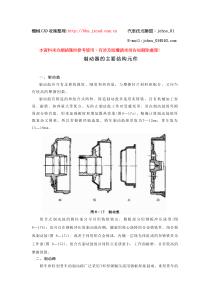
产品包装生产线(方案三)设计说明书1产品包装生产线(方案3)1.设计课题概述如下图所示,输送线1上为小包装产品,其尺寸为长宽高200200600,采取步进式输送方式,送第一包产品至托盘A上(托盘A上平面与输送线1的上平面同高)后,托盘A下降00mm2,第二包产品送到后,托盘A上升00mm2,然后,把产品推入输送线2。原动机转速为2400rpm,产品输送数量分三档可调,每分钟向输送线2分别输送8,16,24件小包装产品。图1功能简图2.设计课题工艺分析由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1,在A处使产品上升,下降的是执行构件2,在A处把产品推到下一个工位的是执行构件3,三个执行构件的运动协调关系如图所示。T3T2T1执行构件运动情况执行构件1进退进退进退进退执行构件2停降停升停降停升执行构件3停进退停图2运动循环图图1中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期。由图2可以看出,执行构件1是作连续往复移动的,而执A21280产品包装生产线(方案三)设计说明书2行构件2则有一个间歇往复运动,执行构件3作一个间歇往复运动。三个执行构件的工作周期关系为:2T1=T2。执行构件3的动作周期为其工作周期的1/4。3.设计课题运动功能分析及运动功能系统图根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如图3所示。该运动功能把一个连续的单向转动转换为连续的往复移动,主动件每转动一周,从动件(执行构件1)往复运动两次,主动件的转速分别为4、8、12rpm。图3执行机构1的运动功能由于电动机转速为2400rpm,为了在执行机构1的主动件上分别得到4、8、12rpm的转速,则由电动机到执行机构之间的传动比iz有3种分别为:2001224003008240060042400332211nninninnizzz总传动比由定传动比ic与变传动比iv组成,满足以下关系式:iz1=iciv1iz2=iciv2iz3=iciv3三种传动比中iz1最大,iz3最小。由于定传动比ic是常数,因此3种变传动比中iv1最大,iv3最小。若采用滑移齿轮变速,其最大传动比最好不要大于4,即:iv14令:iv1=4则有:150460011vzciii故变传动比的其他值为:3415020021503003322czvczviiiiii产品包装生产线(方案三)设计说明书3于是,有级变速单元如图4:i=4,2,1.33图4有级变速运动功能单元为保证系统过载时不至于损坏,在电动机和传动系统之间加一个过载保护环节。过载保护运动功能单元可采用带传动实现,这样,该运动功能单元不仅具有过载保护能力,还具有减速功能,如图5所示。i=2.5图5过载保护运动功能单元整个传动系统仅靠过载保护功能单元的减速功能不能实现全部定传动比,因此,在传动系统中还要另加减速运动功能单元,减速比为605.21505.2cii减速运动功能单元如图6所示。i=60图6执行机构1的运动功能根据上述运动功能分析,可以得到实现执行构件1运动的功能系统图,如图7所示。2400rpmi=2.5i=4,2,1.33i=60图7实现执行构件1运动的运动功能系统图为了使用同一原动机驱动执行构件2,应该在图7所示的运动功能系统图加上1个运动分支功能单元,使其能够驱动分支执行构件2,该运动分支功能单元如图8所示。图8运动分支功能单元执行构件2的执行运动是间歇往复移动。执行构件3的执行运动为间歇往复移动,其运动方向与执行构件1的运动方向垂直。为了使执行构件2和执行构件3的运动和执行构件1的运动保持正确的空间关系,可以加一个运动传动方向转换功能单元,如图9所示。执行构件1产品包装生产线(方案三)设计说明书4图9运动传动方向转换的运动功能单元经过运动传递方向转换功能单元输出的运动需要分成两个运动分支分别驱动执行构件2的一个运动和执行构件3的一个运动。因此,需要加一个运动分支功能分支单元,如图10所示。图10运动分支功能单元执行构件2的一个运动是间歇往复移动,考虑采用两个运动单元,将连续转动转换成间歇单向转动,再转换成间歇往复移动。如图11所示。图11连续转动转换为间歇往复移动的运动功能单元根据上述分析可以得出实现执行构件1和执行构件2运动功能的运动功能系统图,如图12所示。图12执行构件1、2的运动功能系统图执行构件3需要进行间歇往复移动,为此,需要将连续转动转换为间歇转动。考虑采用一个运动系数为的间歇运动单元,如图13所示。图13间歇运动功能单元尽管执行构件3在一个工作周期内,其间歇时间很长,运动时间很短,但是当其运动时,运动则是连续的、周期的。因此,需要把图13中的运动功能单元的输出运动转换为整周运动,于是在其后加一个运动放大功能单元,如图14所示。i=1/4执行构件2产品包装生产线(方案三)设计说明书5图14运动放大功能单元然后,再把该运动功能单元输出的运动转换为往复移动,其运动功能单元如图15所示。图15把连续转动转换为往复移动的运动功能单元根据上述分析,可以画出整个系统的运动功能系统图,如图16所示。12345789图16产品包装生产线(方案3)的运动功能系统图4.设计课题运动方案拟定根据图16所示的运动功能系统图,选择适当的机构替代运动功能系统图中的各个运动功能单元,便可拟定出机械系统运动方案。图16中的运动功能单元1是原动机。根据产品包装生产线的工作要求,可以选择电动机作为原动机。如图17所示。2400rpm1图17电动机替代运动功能单元1图16中的运动功能单元2是过载保护单元兼具减速功能,可以选择带传动实现,如图18所示。执行构件2执行构件31011126产品包装生产线(方案三)设计说明书62图18带传动替代过载保护功能单元2图16中的运动功能单元3是有级变速功能单元,可以选择滑移齿轮变速传动替代,如图19所示。33.1,2,4i图19滑移齿轮变速替代运动功能单元3图16中的运动功能单元4是减速功能,可以选择2级齿轮传动代替,如图20所示。i=60图202级齿轮传动替代运动功能单元4图16中运动功能单元5是运动分支功能单元,可以用运动功能单元7锥齿轮传动的主动轮、运动功能单元6导杆滑块结构的曲柄与运动功能单元4的运动输出齿轮固连替代,如图21所示。5产品包装生产线(方案三)设计说明书7图212个运动功能单元的主动件固联替代运动功能单元5图16中的运动功能单元6将连续传动转换为间歇往复移动,可以选择导杆滑块机构替代,如图22所示。图22导杆滑块机构替代运动功能单元6图16中的运动功能单元7是运动传递方向转换功能单元,可以用圆锥齿轮传动替代,如图23所示。图23圆锥齿轮传动替代运动功能单元7运动单元8的类型与运动单元5相同。图16中的运动功能单元9是将连续转动转换为间歇往复移动,可以用凸轮机构固联来实现,如图24所示。图24凸轮机构固联替代功能单元9图16中运动功能单元10是把连续转动转换为间歇转动的运动功能单元,可以用槽轮机构替代。如图25所示。该槽轮机构如下图所示。产品包装生产线(方案三)设计说明书8图25用槽轮传动替代运动功能单元10图16中的运动功能单元11是运动放大功能单元,把运动功能单元10中槽轮在一个工作周期中输出的1/4周的转动转换为一周的运动,用圆柱齿轮机构替代,其传动比为i=1/4。图16中运动功能单元12是把连续转动转换为连续往复移动的运动功能单元,可以用曲柄滑块机构替代,如图26所示。图26用曲柄滑块机构替代运动功能单元12根据上述分析,按照图16各个运动单元连接顺序把个运动功能单元的替代机构一次连接便形成了产品包装生产线(方案3)的运动方案简图,如图27所示。图27-(a)1012产品包装生产线(方案三)设计说明书9图27-(b)图27-(c)图27产品包装生产线(方案3)的运动方案简图5.设计课题运动方案设计1)滑移齿轮传动设计A.确定齿轮齿数如图19中齿轮5,6,7,8,9,10组成了滑移齿轮有级变速单元,其齿数分别为z5,z6,z7,z8,z9,z10。由前面分析可知:33.13424321vvviii按最小不根切齿数取z9=17,则z10=iv1*z9=4×17=68为了改善传动性能应使相互啮合的齿轮齿数互为质数,取z10=69。其齿数和为z9+z10=17+69=86,为满足传动比和中心距要求,三对齿轮均取角度变位齿产品包装生产线(方案三)设计说明书10轮,其齿数:69,17,60,26,56,301098765zzzzzz。B.计算齿轮几何尺寸表1滑移齿轮5、6参数序号项目代号计算公式及计算结果1齿数齿轮55z30齿轮66z562模数m23压力角204齿顶高系数ah15顶隙系数c0.256标准中心距a867实际中心距'a88.78啮合角'24.219变位系数齿轮55x0.6齿轮66x0.910齿顶高齿轮55ah2.9齿轮66ah3.511齿根高齿轮55fh1.3齿轮66fh0.712分度圆直径齿轮55d60齿轮66d11213齿顶圆直径齿轮55ad65.8齿轮66ad11914齿根圆直径齿轮55fd57.4齿轮66fd110.615齿顶圆压力角齿轮55a31.03齿轮66a27.82产品包装生产线(方案三)设计说明书1116重合度1.38表2滑移齿轮7、8参数序号项目代号计算公式及计算结果1齿数齿轮77z26齿轮88z602模数m23压力角204齿顶高系数ah15顶隙系数c0.256标准中心距a867实际中心距'a88.78啮合角'24.219变位系数齿轮77x0.6齿轮88x0.910齿顶高齿轮77ah2.9齿轮88ah3.511齿根高齿轮77fh1.3齿轮88fh0.712分度圆直径齿轮77d52齿轮88d10013齿顶圆直径齿轮77ad57.8齿轮88ad12714齿根圆直径齿轮77fd49.4齿轮88fd118.615齿顶圆压力角齿轮77a32.29齿轮88a27.39产品包装生产线(方案三)设计说明书1216重合度1.37表3滑移齿轮9、10参数序号项目代号计算公式及计算结果1齿数齿轮99z17齿轮1010z692模数m23压力角204齿顶高系数ah15顶隙系数c0.256标准中心距a867实际中心距'a88.78啮合角'24.219变位系数齿轮99x0.6齿轮1010x0.910齿顶高齿轮99ah2.9齿轮1010ah3.511齿根高齿轮99fh1.3齿轮1010fh0.712分度圆直径齿轮99d34齿轮1010d13813齿顶圆直径齿轮99ad39.8齿轮1010ad14514齿根圆直径齿轮99fd31.4齿轮1010fd136.615齿顶圆压力角齿轮99a36.61齿轮1010a26.58产品包装生产线(方案三)设计说明书1316重合度1.312)定轴齿轮传动设计A.圆柱齿轮传动设计由图可知,齿轮11、12、13、14实现运动功能单元4的减速功能,它所实现的传动比为60。由于齿轮11、12、13、14是2级齿轮传动,这2级齿轮传动的传动比可如此确定171311zz,于是55249.3111412zzz55171211zz55171413zz由图27-(c)可知,齿轮32、33实现运动功能单元15的放大功能,它所实现的传动比为1/4,齿轮33可按最小不根切齿数确定,即1733z则齿轮32的齿数为:68417为使传动比更接近于要求,取69173233zz取模数m=2mm,计算各个齿轮参数。表4定轴圆柱齿轮11、12参数(齿轮13、14与11、12对应相同)序号项目代号计算公式及计算结果1齿数齿轮1111z17齿轮1212z552模数m23压力角204齿顶高系数ah15顶隙系数c0.256标准中心距a727实际中心距'a74.268啮合角'24.219变位系数齿轮1111x0.6齿轮1212x0.9产品包装生产线(方案三)设计说明书
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 sean85326
sean85326
本文标题:产品包装生产线课程设计(方案三)原创,优秀
链接地址:https://www.777doc.com/doc-5269348 .html