您好,欢迎访问三七文档
当前位置:首页 > 法律文献 > 理论/案例 > 模拟电路二阶系统模型设计及仿真(PID参数调节)
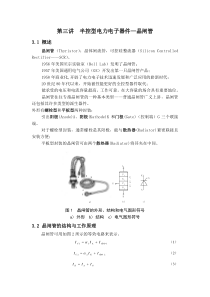
控制系统综合课程设计报告第1页共17页1设计意义及要求………………………………………41.1设计意义…………………………………………41.2设计要求……………………………………………42系统模型………………………………………………42.1各环节建模…………………………………………42.1.1比例环节……………………………………………………42.1.2积分环节……………………………………………………52.1.3惯性环节……………………………………………………62.2二阶系统方块图……………………………………62.3二阶系统模拟电路图………………………………72.4二阶系统原理图……………………………………73设计过程………………………………………………73.1传递函数的建立……………………………………73.2系统动态性能指标…………………………………83.2.1理论值计算…………………………………………………83.2.2用Matlab绘制单位阶跃响应曲线………………………103.2.3仿真结果分析……………………………………………164个人总结……………………………………………16附录………………………………………………………17参考文献…………………………………………………20控制系统综合课程设计报告第2页共17页1设计意义及要求1.1设计意义“自动控制原理”是信息控制学科的基础理论,是一门理论性较强的工程学科,该课程的主要任务是研究和讨论控制系统的一切一般规律,从而设计出合理的自动控制系统。因此该课程设计主要是培养学生的统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和方法,对工程实际系统进行完整而全面分析和综合。掌握控制系统的设计和校正方法,掌握利用Multisim和Matlab对控制理论进行分析,研究和仿真技能,提高分析问题和解决问题的能力。1.2设计要求用PID参数调节,给出二阶系统的开环传递函数,写出具体计算步骤,并与仿真结果进行比较,最后给出结论。2系统模型2.1各环节建模2.1.1比例环节比例环节又称放大环节,其输出量和输入量之间的关系为一种固定的比例关系。它的输出量能够无失真、无滞后的按一定的比例复现输入量。比例环节的表达式为)()(tKrtc⑴比例环节的传递函数为KsRsCsG)()()(⑵控制系统综合课程设计报告第3页共17页图1比例环节2.1.2积分环节积分环节的输出量和输入量的积分成正比,其动态方程为tdttrTtc0)(1)(⑶式中,T为积分时间常数。积分环节的传递函数为STsRsCsG1)()()(⑷图2积分环节控制系统综合课程设计报告第4页共17页2.1.3惯性环节惯性环节又称非周期环节,其输出量和输入量之间的关系可用微分方程描述为)()()(tKrtctcdtdT⑸对应的传递函数为1)()()(STKsRsCsG⑹式中:T为惯性环节的时间常数;K为比例系数。图3惯性环节2.2二阶系统方块图图4二阶系统方块图控制系统综合课程设计报告第5页共17页2.3二阶系统模拟电路图图5二阶系统模拟电路图2.4二阶系统原理图图6二阶系统结构图3设计过程3.1传递函数的建立由图4,可知二阶系统闭环传递函数为:控制系统综合课程设计报告第6页共17页2222)(nnnsss⑺由图5,可得:22212/1)/(/1)()()(TSTKSTsUsUs⑻式中,RCT,78/RRK⑼由上述⑺⑻比较可得:RCTn/1/1⑽782/2/RRK⑾因此,确定R(1R~6R),C,7R和8R的值便可以确定二阶传递函数。现以kRRRRRR100654321,kR2007,kR2008,uFC1.0为例,则传递函数为:1000010010000)(2SSs⑿3.2系统动态性能指标3.2.1理论值计算n,,上升时间rt,峰值时间pt,调节时间st,超调量%的求取:系统传递函数为:1000010010000)(2SSs已知:1212)(22222SnnnTsTsss(nT1)⒀因此,可得:100002n即100n1002n即5.0控制系统综合课程设计报告第7页共17页上升时间rt:21ndrt⒁且知:cos其中,为二阶系统单位阶跃响应的初相角。所以,求得:3/arccos则:stndr02.012峰值时间pt:stnp04.012⒂调节时间st:stns06.03⒃超调量%:%3.16%100%21/e⒄同理,改变各参数赋值,完成下表表一:计算结果参数rt(s)%pt(s)st(s)阶跃响应曲线仿真结果与理论值比较R=100KC=1μfn=10rad/sR7=100KR8=0K00.157100%0.314如图7符合R7=100KR8=50K25.00.13644.5%0.3241.2如图8符合控制系统综合课程设计报告第8页共17页续表一R=100KC=1μfn=10rad/sR7=100KR8=100K5.00.24216.3%0.3630.6如图9符合R7=100KR8=150K75.00.3662.8%0.4750.4如图10符合R7=50KR8=200K20.15如图11符合R=100KC=0.1μfn=100rad/sR7=100KR8=0K00.0157100%0.0314如图12符合R7=100KR8=50K25.00.018844.5%0.03240.12如图13符合R7=100KR8=100K5.00.024216.3%0.03630.06如图14符合R7=100KR8=150K75.00.0372.8%0.0470.04如图15符合R7=50KR8=200K20.015如图16符合3.2.2用Matlab绘制单位阶跃响应曲线控制系统综合课程设计报告第9页共17页上升时间0.16s峰值时间2.88s调节时间15.00s超调量100%05101500.20.40.60.811.21.41.61.82峰值时间12.88超调量100.00%上升时间0.16调整时间15.00容许范围0.95容许范围1.05稳态误差-0.699251图7sradn/10,0时系统单位阶跃响应曲线上升时间0.19s峰值时间0.32s调节时间1.07s超调量44.39%00.511.522.5300.511.5峰值时间0.32超调量44.39%上升时间0.19调整时间1.07容许范围0.95容许范围1.05稳态误差-0.001376图8sradn/10,25.0时系统单位阶跃响应曲线控制系统综合课程设计报告第10页共17页上升时间0.25s峰值时间0.36s调节时间0.52s超调量16.30%00.511.500.20.40.60.811.21.4峰值时间0.36超调量16.30%上升时间0.25调整时间0.52容许范围0.95容许范围1.05稳态误差-0.002349图9sradn/10,5.0时系统单位阶跃响应曲线上升时间0.37s峰值时间0.48s超调量2.83%00.511.500.20.40.60.811.21.4峰值时间0.48超调量2.83%上升时间0.37图10sradn/10,75.0时系统单位阶跃响应曲线控制系统综合课程设计报告第11页共17页峰值时间4.00s超调量0.00%00.511.522.533.5400.10.20.30.40.50.60.70.80.91峰值时间4.00超调量-0.00%图11sradn/10,2时系统单位阶跃响应曲线上升时间0.02s峰值时间3.55s调节时间4.00s超调量100%00.511.522.533.5400.20.40.60.811.21.41.61.82峰值时间3.55超调量100.00%上升时间0.02调整时间4.00容许范围0.95容许范围1.05稳态误差0.525296图12sradn/100,0时系统单位阶跃响应曲线控制系统综合课程设计报告第12页共17页上升时间0.02s峰值时间0.03s调节时间0.10s超调量43.06%00.050.10.150.20.250.30.350.40.450.500.511.5峰值时间0.03超调量43.06%上升时间0.02调整时间0.10容许范围0.95容许范围1.05稳态误差0.001587图13sradn/100,25.0时系统单位阶跃响应曲线上升时间0.03s峰值时间0.04s调节时间0.05s超调量15.31%00.020.040.060.080.10.1200.20.40.60.811.21.4峰值时间0.04超调量15.31%上升时间0.03调整时间0.05容许范围0.95容许范围1.05稳态误差0.004030图14sradn/100,5.0时系统单位阶跃响应曲线控制系统综合课程设计报告第13页共17页上升时间0.04s峰值时间0.05s超调量2.76%00.010.020.030.040.050.060.070.080.090.100.20.40.60.811.21.4峰值时间0.05超调量2.76%上升时间0.04图15sradn/100,75.0时系统单位阶跃响应曲线峰值时间0.50s超调量0.00%00.050.10.150.20.250.30.350.40.450.500.10.20.30.40.50.60.70.80.91峰值时间0.50超调量-0.00%图16sradn/100,2时系统单位阶跃响应曲线控制系统综合课程设计报告第14页共17页3.2.3仿真结果分析当10时,特征根为一对实部为负的共轭复数,称为欠阻尼状态;当1时,特征根为两个相等的负实根,称为临界阻尼状态;当1时,特征根为两个不相等的负实数,称为过阻尼状态;当0时,特征根为一对纯虚数,也称为无阻尼状态。有上述实验结果分析知:①图7和图12为无阻尼状态,其波形作等幅振荡。②图10和图16为过阻尼状态,其波形为单调上升的非振荡过程。③由仿真图形所示数据可知,仿真结果与理论结果基本符合。④二阶系统阻尼比越大,系统超调量越小,系统稳定性越好。且最佳阻尼比在0.7左右时,二阶系统为最佳状态。4个人总结附录实验程序:%%求阶跃响应的典型指标functionmain_GetPerformanceOfStepResponseclcclearallcloseallglobalgTolerancegTolerance=0.05;%调整时间的偏差容许范围控制系统综合课程设计报告第15页共17页%%testwn=X;xi=Y;X,Y的值视具体情况而定g=tf(wn^2,[1,2*xi*wn,wn^2]);t=0:0.01:;y=step(g,t);%%计算阶跃响应的指标stepvalue=1;[OverShoot,RiseTime,PeakTime,AdjustTime,SteadyStateError]=GetPerformanceOfStepResponse(t,y,stepvalue);%绘图figureplot(t,y)gridonline([PeakTime,PeakTime],[0,(1+OverShoot/100)*stepvalue],'color','r')text(PeakTime,stepvalue*0.05,sprintf('峰值时间%.2f',PeakTime))text(PeakTime,(1+OverShoot/100+0.05)*stepvalue,sprintf('超调量%.2f%%',OverShoot))line([RiseTime,RiseTime],[0,stepvalue],'colo
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 星月紫光
星月紫光
本文标题:模拟电路二阶系统模型设计及仿真(PID参数调节)
链接地址:https://www.777doc.com/doc-5442083 .html