您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 项目/工程管理 > 基于遗传算法的PID整定与优化
龙源期刊网整定与优化作者:李燕皇来源:《商品与质量·学术观察》2013年第05期摘要:遗传算法是一种基于达尔文进化论和孟德尔遗传学说来实现随机、迭代、自适应、并行性搜索的优化算法,尤其适合处理复杂的、非线性的控制问题。因此在此文,采用遗传算法直接优化PID控制器参数,并控制一个带迟延的主汽温控制系统,仿真结果表明遗传算法收敛较快,得到的PID控制器控制效果明显优于传统的PID控制。关键词:遗传算法优化主汽温引言由于PID控制规律具有算法简单、鲁棒性好和可靠性高等优点,因此过程控制中采用最多的依然是PID方式。PID参数整定与优化的方法有很多,工程上整定方法有衰减曲线法、Z-N法,ISTE最优设定方法、快速整定和继电法等,在参数优化过程中多采用梯度法,单纯形法和智能方法。衰减曲线法、Z—N法和快速整定法是经验的总结不是最优解,继电法会使被控系统振荡,而优化中的梯度法需要对目标函数微分,同时梯度法与单纯形法会陷入局部最优点,而ISTE最优设定方法和智能方法是针对一类特定被控对象的。本文采用遗传算法进行PID参数整定与优化,这是一种寻求全局最优的优化方法,无需对目标函数微分。1、遗传算法遗传算法简称GA(GeneticAlgorithms)是1962年由美国Michigan大学的Holland教授提出的模拟自然界遗传机制和生物进化论而成的一种并行随机搜索寻优方法[1]。它将“优胜劣汰,适者生存”的生物进化原理引入优化参数形成的编码串联群体中,按所选择的适应值函数并通过遗传中的复制、交叉及变异对个体进行筛选,使适应值高的个体被保留下来,组成新的的群体,新的群体既继承了上一代的信息,又优于上一代。这样周而复始,群体中个体适应度不断提高,直到满足一定的条件。其算法简单,可并行处理,能得到全局最优解。GA寻优的一些遗传操作:1、染色体(基因组、个体)染色体即问题解答的二进制串或十进制串表示,对应地有二进制编码和实数编码。二进制编码:把变量或参数用二进制串表示,串长由要求的计算精度决定。龙源期刊网实数编码:直接用原始变量或参数构成染色体。把表示几个参数(变量)的子串拼成一条染色体。2、产生初始种群计算机产生参数或变量可能取值范围内的随机数,N个个体随机组成初始种群。3、计算各个个体的适应值fi适应值函数依问题而定,可以是商业利润,对于成败,神经网络的期望输出与实际输出的均方差,或其他目标函数表示。4、判断进化可否结束GA的收敛判据常用由两种方法:1、是从解的质量考虑,若连续若干代得到的最好解不变,则认为收敛,停止进化;2、是进化了足够代数之后认为收敛,以其最后最优结果为所求解。否则继续进行进化。5、选择(Selection):根据各个个体的适应度,按照一定的规则或方法,从第t代群体P(t)中选择出一些优良的个体遗传到下一代P(t+1)中。6、交叉(Crossover):将群体P(t)内的各个个体随机搭配成对,对每一对个体,以某个概率(称为交叉概率,crossoverrate)交换它们之间的部分染色体。例父代1:00101|101交换后00101011父代2:10110|011交换后101101017、变异(Mutation):对群体P(t)中的每一个个体,以某一概率(称为变异概率,mutationrate)改变某一个或某一些基因座上的基因值为其它的等位基因。例10110101变异后10010101需要指出,GA中的主要参数N,Pc,Pm等与问题有关,不存在统一的额规范化求解公式,即取值无理论指导,他们的取值凭经验[2],一般N为20-200,Pc=0.5-1.0,Pm=0-0.05。N太小,初始种群不能覆盖整个寻优空间,有可能停留在局部极值上;N太大,不必要地增加计算量、计算机的内存和机时。龙源期刊网的作用的两面性:一方面交换有利于保持种群的多样性,优良个体的出现;另一方面它又会破坏优良个体。在进化后期,又可能出现所有个体串全部一样,这时单靠交换操作不能产生新的个体,只有靠变异操作才能产生新的个体,使进化继续进行,由于变异对优良个体起破坏作用,故Pm一般取较小值。可以采取Pc,Pm随fi自适应调整,以改善GA的收敛速度。2、遗传算法用于PID参数整定遗传算法应用于PID控制器参数整定的基本思想[3]是:在寻优时先对PID参数进行编码,按一定规模初始化一个种群,种群中的每一个体代表一个可能的解。然后根据适值函数,计算每一个体的适值并依此控制再生操作之后按一定的概率对种群进行交叉、变异操作。这样种群不断进化,直至寻优结束。在应用遗传算法时要注意以下四个关键问题:1、问题编码:对PID各参数采用一致的编码构成子串,再将子串拼接起来构成染色体串。2、适值函数的确定:按照ITSE(Integralsquarederror)指标,选取误差平方和为适值函数。3、再生方式的选取:先算上一代个体(A1)的适值,然后将这一代个体全部进行交叉、变异操作,得到新一代个体(A2)及适应值,最后根据A1和A2两组种群的适应值,从中选择出好的个体形成下一代种群。4、遗传算法本身参数的确定:经过试验及资料分析,取群体规模N为50,交叉概率为0.90,变异概率为0.001。3、仿真实例被控对象为电厂的过热汽温系统,采用串级控制方案,其系统副回路中导前汽温对象传递函数[4]为:G2(s)=主对象的传递函数为:G1(s)=龙源期刊网控制,按标准ITAE准则[5],其控制规律为:Gc2=5整定并优化主回路中的主控制器PID参数。采样周期为1s,群体基因数为50,交叉概率为0.90,变异概率为0.001,采用单位阶跃信号作为系统主给定信号,迭代终止条件:迭代次数为100次;同时迭代中两次的最小适度值差小于400。1-手动调整simulink图的曲线,2-基于遗传算法优化的曲线由上图可以看出遗传算法的PID控制优点,系统的超调量小,快速性明显提高,调节时间缩短,从而提高了系统的动态性能。通过实例仿真研究表明,采用遗传算法结构简单,鲁棒性强,是一种高效的寻优方法。遗传算法与传统寻优方法相比具明显的控制效果,超调量小、响应时间快、稳态输出可以做到无静态误差,非常适合于对实时性要求极高的实际生产过程控制。5、结论本方法不需要对目标函数微分,这样避免了寻优中一些目标函数无法微分的问题;此外由于复制、交叉和变异功能以及群体寻优的方式避免了陷入局部最优解问题,因此本方法是一种全局寻优方法,其寻优结果不受初值的影响。在被控对象数学模型已知条件下,仿真试验证明了该方法具有离线整定与优化的可行性和有效性。参考文献:[1]陈国良,王煦法等.遗传算法及其应用.北京:人民邮电出版社,1996[2]张晓馈等.一种新的优化搜索算法遗传算法.控制理论与应用,1995.6.12(3):265-271[3]胡晚霞.PID控制器参数快速整定的新方法.自动化与仪器仪表,1996,(5):13-16[4]刘禾,李农庄,张晓萍等.大迟延过程的预测智能控制.华北电力大学学报,1998,25(4):74-79[5]翁思义.自动控制系统计算机仿真与辅助设计.西安:西安交通大学出版社,198龙源期刊网
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

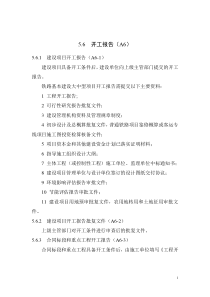
![《建筑安装工程承包合同》[A]](/doc-384595.png)
 kongfeifan
kongfeifan
本文标题:基于遗传算法的PID整定与优化
链接地址:https://www.777doc.com/doc-5470031 .html