您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 电力拖动课后习题思考题答案参考资料
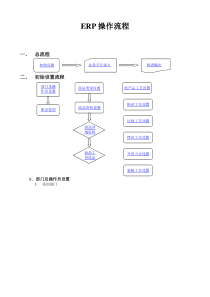
袃膀螅一、可以作为填空题或简答题的蒅2-1简述直流电动机的调速方法。答:直流调速系统常以(调压调速)为主,必要时辅以(弱磁调速),以(扩大调速范围),实现(额定转速以上调速)。节2-2直流调压调速主要方案有(G-M调速系统,V-M调速系统,直流PWM调速系统)。羀2-3V-M调速系统的电流脉动和断续是如何形成的?如何抑制电流脉动?袇11-12答:整流器输出电压大于反电动势时,电感储能,电流上升,整流器输出电压小于反电动势时,电感放能,电流下降。整流器输出电压为脉动电压,时而大于反电动势时而小于,从而导致了电流脉动。当电感较小或电动机轻载时,电流上升阶段电感储能不够大,从而导致当电流下降时,电感已放能完毕、电流已衰减至零,而下一个相却尚未触发,于是形成电流断续。薃2-4看P14图简述V-M调速系统的最大失控时间。蚂14答:t1时刻某一对晶闸管被触发导通,触发延迟角为α1,在t2t1时刻,控制电压发生变化,但此时晶闸管已导通,故控制电压的变化对它已不起作用,只有等到下一个自然换向点t3时刻到来时,控制电压才能将正在承受正电压的另一对晶闸管在触发延迟角α2后导通。t3-t2即为失控时间,最大失控时间即为考虑t2=t1时的失控时间。2-5简述V-M调速系统存在的问题。16答:整流器晶闸管的单向导电性导致的电动机的不可逆行性。整流器晶闸管对过电压过电流的敏感性导致的电动机的运行不可靠性。整流器晶闸管基于对其门极的移相触发控制的可控性导致的低功率因数性。2-6简述不可逆PWM变换器(无制动电流通路与有制动电流通路)各个工作状态下的导通器件和电流通路。17-182-7调速时一般以电动机的(额定转速)作为最高转速。2-8(调速范围)和(静差率)合称调速系统的(稳态性能指标)。2-8一个调速系统的调速范围,是指(在最低转速时还能满足所需静差率的转速可调范围)。2-9简述转速反馈控制的直流调速系统的静特性本质。答:在闭环系统中,每增加(或减少)一点负载,就相应地提高(或降低)一点电枢电压,使电动机在新的机械特性下工作。因此闭环系统的静特性本质上就是无数开环机械特性上各取一个相应的工作点连接而成的。2-10简述比例反馈控制的规律。答:比例控制的反馈控制系统是(被调量有静差)的控制系统;反馈控制系统的作用是(抵抗前向通道的扰动,服从给定);反馈系统的精度依赖于(给定和反馈检测的精度)。2-11简述积分控制规律答:积分控制可以使系统在无静差的情况下保持恒速运行,实现无静差调速。2-12比例调节器和积分调节器有何不同?答:比例调节器的输出只取决于(输入偏差的现状),而积分调节器的输出则包含了(输入偏差量的全部历史)2-13简述比例积分控制规律。答:比例部分能(迅速响应控制作用),积分部分则(最终消除稳态偏差)。2-14微机控制的调速系统有什么特点?答:(信号离散化,信息数字化)。2-15旋转编码器分为哪几种?各有什么特点?答:绝对式编码器:常用语检测转角信号,若需要转速信号,应对转角微分。增量式编码器:可直接检测转速信号。2-16数字测速方法有哪些精度指标?答:(分辨率,测速误差率)。2-17采用旋转编码器的数字测速方法有(M,T,M/T)。高低全2-18为什么积分需限幅?答:若没有积分限幅,积分项可能很大,将产生较大的退饱和超调。蒇2-19简述带电流截止负反馈环节转速反馈调速系统机械特性的特点。答:电流负反馈的作用相当于在主电路中串入一个大电阻KpKsR,导致当Id=Idcr时,机械特性急剧下垂;比较电压Ucom与给定电压Un*作用一致,相当于把理想空载转速提高到n0`=(KpKs(Un*+Ucom))/(Ce(1+K))。袈二、公式和特性袅1.整流电压平均值:Ud0=(m/π)Umsin(m/π)cosα(Um/m_单相全波/三相半波/三相全波_√2U2/√2U2/√6U2/2/3/6)膁2.V-M调速系统机械特性方程:n=(Ud0-IdR)/Ce膇3.晶闸管整流器最大失控时间:Tsmax=1/mf蚅4.调速范围定义式:D=nmax/nmin肄5.静差率定义式:s=△n/n薁6.闭环静特性与开环静特性:ncl=(Ud0cl-IdR)/Ce=(KpKsUn*-IdR)/(Ce(1+K))nop=(Ud0op-IdR)/Ce=(KpKsUn*-IdR)/Ce袇7.调速范围,静差率和额定速降之间的关系式(开环和闭环):D_=(nN/△n_)(s/(1-s))(△ncl=△nop/(1+K))8.转速反馈控制直流调速系统的K定义式及表达式:K=KpKsα/Ce9.临界开环放大倍数Kcr=(Tm(Tl+Ts)+Ts^2)/(TlTs)K(Tl=L/R|Tm=((GD^2)R)/(375CeCm))10.各种数字测速方法其分辨率和测速误差率表达式:nM=(60M1)/(ZTc)|QM=60/(ZTc)|δM=1/M1|nT=(60f0)/(ZM2)|QT=(Zn^2)/(60f0-Zn)|δT=1/(M2-1)|nMT=(60f0M1)/(ZM2)=nT?M1|QMT=60/(ZTc)=QM|δMT={低速—δT|高速—δM|11.连续式PI算式:?u(t)=Kpe(t)+(1/τ)∫(0_t)e(t)dt12.位置式PI算式:u(k)=Kpe(k)+(Tsam/τ)∑(i=0_k)e(i)13.增量式PI算式:△u(k)=u(k)-u(k-1)=Kp(e(k)-e(k-1))+(Tsam/τ)e(k)1.V-M调速-系统原理图:2.(无制动和有制动)直流PWM变换器-电动机-电路原理图:3.转速负反馈直流调速系统-系统原理图:4.转速负反馈直流调速系统-静态结构图:5.转速负反馈直流调速系统-动态结构图:6.带电流截止负反馈的闭环直流调速系统-静态结构图:1.有制动电流通路的不可逆PWM变换器-直流电动机系统各工作状态下的电压和电流波形:2.带电流截止负反馈比例控制闭环直流调速系统-静特性:螇膂3-1为了实现(电流的实时控制和快速跟随),希望电流调节器(不要)进入饱和状态,因此,对于静特性来说,只有(转速调节器的饱和与不饱和两种情况)。羀3-2当两个调节器都不饱和且稳态时,它们的输入偏差电压分别为(0)。蚈3-3当ASR输出(达到限幅值Uim*),转速外环呈(开环状态),转速变化对转速环(不会)产生影响,双闭环系统变成一个(电流无静差的单电流闭环调节系统)。稳态时,Id(=)Idm。螈3-4电流限幅值Idm取决于(电动机的容许过载能力和系统要求的最大加速度)。蒅3-5简述采用两个PI调节器分别形成内外闭环的效果。答:双闭环直流调速系统的静特性在负载电流小于Idm时表现为转速无静差,此时转速负反馈起主要调节作用。当负载电流达到Idm时,对应于转速调节器为饱和输出Uim*,此时电流调节器起主要调节作用,系统表现为电流无静差,起到过电流的自动保护作用。荿3-6简述ASR的退饱和条件。答:当ASR处于饱和状态时,若实际转速大于给定转速,则反馈电压大于给定电压,使偏差电压小于零,则ASR反向积分,从而退饱和,返回线性调节状态。3-7简述转速电流负反馈控制电流调速系统起动过程。633-8简述双闭环直流调速系统起动过程的特点。(饱和非线性控制;转速超调;准时间最优控制)莈3-9双闭环直流调速系统的抗扰性能主要包括(抗负载扰动;抗电网电压扰动)。薅3-10简述双闭环直流调速系统中转速调节器的作用。答:作为主导调节器,在转速动态过程中,使转速快速跟随给定电压变化,稳态时减小转速误差,采用PIR可实现无静差。对负载变化其抗扰作用。其输出限幅值决定电动机允许最大电流。蚃3-11简述双闭环直流调速系统中电流调节器的作用。答:作为内环调节器,在转速调节过程中,使电流紧紧跟随给定电流变化。对电网电压波动起及时抗扰作用。在转速动态过程中,保证获得电动机最大允许电流,从而加快动态过程。当电动机过载或堵转时,限制电枢电流最大值,起快速的自动保护作用。一旦故障消失,系统立即自动恢复正常。肃二、公式和特性腿1.P62稳态时:Un*=Un=αn=αn0Ui*=Ui=βId=βIdLUc=Ud0/Ks=(Cen+IdR)/Ks=(Ce(Un*/α)+IdR)/Ks蚇2.转速反馈系数:α=Un*m/nm羅3.电流反馈系数:β=Ui*m/Idm1.转速电流反馈控制直流调速系统-系统原理图:2.转速电流反馈控制直流调速系统-稳态结构图:3.转速电流反馈控制直流调速系统-动态结构图:1.时间最优的理想过渡过程:2.双闭环直流调速系统静特性:薂衿蒄一、可以作为填空题或简答题的肄4-1直流PWM可逆调速系统中当电动机停止时,电枢电压瞬时值()零,是(正负脉宽相等的交变脉冲电压),故(电流也是交变的),称为(高频微振电流),其平均值为(),不能产生(平均转矩)。羁4-2高频微振电流对电机有何影响?答:消除电机正反向时的静摩擦死区,起动力润滑作用。同时也增大了电机的损耗。虿二、公式和特性蒆1.双极式控制可逆PWM变换器输出电压平均值:Ud=(2ton/T-1)Us1.调速系统四象限运行-示意图:2.桥式可逆PWM变换器电路-原理图:3.桥式可逆PWM调速系统主电路-原理图:膂莁莀第5章薇一、可以作为填空题或简答题的薄5-1简述矢量控制的基本思想。答:将逆变器和交流电动机视为一体,以在电机内产生圆形旋转磁场为目标来控制变频器工作。螀5-2异步电动机变压变频调速系统中,基频以下调速采用(恒压频比)控制,称为(恒转矩)调速;基频以上采用(保持电压不变)控制,称为(近似的恒功率调速)。为什么?略膀5-3六拍式逆变器控制的异步电动机正六边形定子磁链的大小与(直流侧电压Ud)成正比,而与(电源角频率)成反比。在基频以下调速时,应(保持正六边形定子磁链的最大值恒定)。若直流侧电压Ud恒定,则ω1越小时,△t越大,势必导致(|Ψs(k)|)增大。因此,要保持正六边形定子磁链不变,必须使Ud/ω1为常数,这意味着在变频的同时必须调节直流电压Ud,造成了控制的复杂性。有效的方法是(插入零矢量)。5-4简述转差频率控制的基本思想。答:保持(气隙磁通φm不变)的前提下,通过控制(转差频率ωs)来控制(转矩)。5-5转差频率控制变压变频调速系统通过(最大转差频率)间接限制(了最大的允许电流)。5-6与直流调速系统相似,转差频率控制变压变频调速系统起动过程分为(转矩上升)(恒转矩、升速)与(转速调节)三个阶段:在恒转矩升速阶段,(ASR)不参与调节,相当于(转速开环),在正反馈内环作用下,保持(加速度恒定);转速超调后,ASR(退出饱和),进入(转速调节阶段),最后达到稳态。5-7简述转速闭环转差频率控制的变压变频调速系统起动过程。答:转矩上升阶段:恒转矩升速阶段:转速调节:二、公式和特性1.公式略1.异步电动机等效电路图:2.交-直-交电压源型PWM变频器主电路:(各个元件作用需知)3.转速开环变压变频调速系统-系统原理图:4.转速闭环转差频率控制变压变频调速系统-系统原理图:1.异步电动机调压调速机械特性:2.异步电动机转子串阻调速机械特性:3.异步电动机变压变频调速机械特性:4.异步电动机变压变频调速控制特性:莄蚃艿第6章袁一、可以作为填空题或简答题的蒆6-1异步电动机的动态数学模型是一个(高阶、非线性、强耦合)的(多变量)系统。肅6-2异步电动机的动态数学模型由(磁链方程、电压方程、转矩方程、运动方程)组成。羃6-3异步电动机每个绕组的磁链是(自感磁链)和(互感磁链)之和。莇6-4绕组间的互感分为哪几类?答:定子三相彼此之间和转子三相彼此之间的互感,因其位置固定,故为常值。定子任一相与转子任一相之间的互感,因其相对位置变化,故为(角位移)的函数。蒇6-5为什么说异步电动机的三相原始数学模型不是物理对象最简洁的描述?答:由异步电动机三相数学模型的约束条件(。。。)可知,对于无中性线Y/Y联结绕组的电动机,三相变量中只有两相是独立的。6-6不同坐标系中电动机模型等效的原则是:(在不同坐标下绕组所产生的合成磁动势相等
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 ayumizuto
ayumizuto
本文标题:电力拖动课后习题思考题答案参考资料
链接地址:https://www.777doc.com/doc-5558569 .html