您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 工程监理 > 哈工大-最优控制结课报告
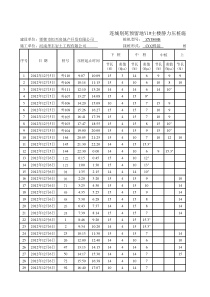
2013年春季学期研究生课程考核(研究报告)考核科目:最优控制学生所在院(系):航天学院学生所在学科:控制科学与工程学生姓名:学号:0学生类别:考试考核结果阅卷人固定调度变量情况下气动力控制律设计传统导弹依靠偏转控制面残剩的力矩改变导弹姿态,从而产生气动力,获得所需机动过载。这种形式有两个缺点:指令讯号和执行指令之间时间延迟较大;导弹发射时速度很低,高空飞行大气密度小,这些情况下由于动压小控制系统效率较低。为了改善导弹性能,出现了利用直接侧向力来辅导导弹姿态的改变或直接改变质心运动的导弹控制方式。直接侧向力的引入弥补了纯气动力控制方式的不足。但同时,侧碰发动机的工作范围收到装药消耗以及发动机个数等因素的限制,很那单独使用直接侧向力来实现拦截导弹的姿态控制。一般大气层内飞行的拦截弹也都是尽量充分利用气动舵,而在制导末段才启动直接侧向力与气动舵的复合控制方法来减小脱靶量。本文主要介绍在复合控制方法中,基于增益调度的控制律设计中,讨论固定在调度变量固定情况下,只有气动力时,控制律的设计,此部分涉及最优控制理论中线性二次型最优控制律跟踪调节器设计。由于只主要讨论关于跟踪调节器的设计问题,对于直接侧向力和气动力的复合控制律的基础知识不做介绍。首先,直接给出复合控制导弹线性参变模型,设攻角为,且使其在工作区内取任意一工作点ss,在此工作点对导弹的非线性模型进行线性化,可得如下模型:()()ssssxAxBuyCx其中,11122122()()()ssssssaaAaa11122122()()(),10()()ssssssssssbbBCbb至此,得到了以ss为参变量的LPV模型,模型中()ssA,()ssB都是ss的连续可微函数。当只有气动力单独作用的情况下,侧向喷流发动机关闭,则侧向力0yT,则导弹的LPV模型简化为()()sssszxAxByCx其中1121()()()ssssssbBb对于上式表示的模型,其参数都是攻角的连续可微函数,属于典型的LPV形式。假设系统状态都可测,可以选取攻角作为调度变量,通过对模型的观测可以发现,引起模型系数变化的主要原因是攻角的改变,同时由于设计的特殊情况,系统只考虑在短时间内迅速跟踪上一个参考信号,参考信号在短时间内大多数情况下是一个常数,设为调度变量失去了设计的价值。控制器的设计思想就是依据调度变量的变化,设计跟随其变化的LPV控制器。下图为LPV控制器的设计示意图,调度变量ss在导弹LPV模型与LPV控制器之间进行调度。uyrymy()()()()()rccssccrsscmssmrcccrsscmssmyxAxBByyuCxDDy()()sssszxAxByCx气动力控制的目的是希望系统的输出y能跟踪信号ry,同时必须兼顾气动舵偏角上下限以及舵回路的过渡过程,此外还需考虑控制器形式不能过于复杂,而线性二次型最优控制律跟踪调节器符合设计的要求。对于最优控制理论,由于广泛应用,本文不作具体介绍,下面仅给出具体的设计过程。考虑固定调度变量ss的情况,取指标泛函如下02211[()()]{[()()]()}22ftrfrfztJSytytQytytRtdt式中,加权系数S的权重表征对末端精度的要求,Q的权重表征对动态误差的要求,R的权重表征对控制能量的要求。将()()ytCxt代入哈密尔顿函数可得2211(,,,)()[]22TzrzzHtxQyCxRAxB由(,,,)0zzHtx得1()()TztRBt,则1()TzxAxBAxRBt;又由()TTTTTrrHCQyCxACQCxACQyx,可得0TrTTTxxABRByCQCQCA设()()()()tPtxtpt,则1111()()()()()[]()()TzTTTtPxPxptPxPAxBptPxPAxPBRBptPxPAxPBRBPxpptPxPAxPBRBPxPBRBppt又由()TTTTTTrrTTTTrCQCxACQyCQCxAPxpCQyCQCxAPxApCQy可得等式如下11()0TTTTTTrPAPPAPBRBPCQCxpPBRBpApCQy于是,可以得到如下方程组11()()()0()()()0TTTTTTrPtAPtPtAPBRBPCQCptPBRBptAptCQy边界条件为:(),()()TTffrfPtCSCptCSyt由此得到最有跟踪控制律为11()()()()TTztRBPtxtRBpt控制律前一项为状态反馈部分,后一项为与参考信号ry有关的前馈部分。考虑到有限时间情况设计的跟踪器系数()Pt、()pt都是时间的函数,对于下面将要设计的运动调度变量情况控制器将带来设计上的难度,而且参考信号在大多数情况下都考虑为常数信号,所以可以将上述设计简单为在无限时间考虑,这样在固定的调度变量点f,P、p都为与时间无关的常数。指标泛函简化如下2201[()]2rzJQyyRdt其中P、p是以下方程组的解1110()TTTTTTrAPPAPBRBPCQCpAPBRBCQy从而设计出状态反馈控制律形式如下()()zxfzfrKxKy以20f为例,取100,1QR,此时模型结构和参数为0.2779112.03021.3212A,0.006610.2638B,[10]C依据方程组可以得到控制器参数如下[8.55181.1628]xK,9.9280zK最优控制律为8.55181.16289.9280zrxy下图给出的是20ry时固定调度变量情况下攻角阶跃响应曲线
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
 龙爱翩
龙爱翩
本文标题:哈工大-最优控制结课报告
链接地址:https://www.777doc.com/doc-5694576 .html