您好,欢迎访问三七文档
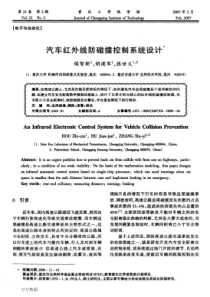
实训十、机械手装配搬运流水线一、实训目的1、理解机械手装配搬运流水线控制系统工作流程。2、掌握用编程软件编写机械手装配搬运流水线控制系统程序。3、掌握I/O的分配、I/O的连接方法和程序的运行调试。二、实训器材1、亚龙PLC主机单元一台。2、亚龙PLC机械手装配搬运流水线单元一台。3、计算机或编程器一台。4、安全连线若干条。5、PLC串口通讯线一条。三、实训原理机械手装配搬运流水线系统控制要求:1、自动运行:(1)初始位置定义为机械手左侧位+机械臂后退位+夹爪上升位+夹爪无件;(2)机械手初始位置,允许自动启动;(3)机械手工艺流程:置台无件→机械手等待→置台有件→机械臂伸出→伸到位→夹爪下降→降到位→夹爪夹紧→夹紧到位→夹爪上升→升到位→机械臂缩回→缩回到位→机械臂右旋→右旋到位→夹爪下降→降到位→夹爪松开→松开到位→夹爪上升→升到位→机械臂左旋→左旋到位→重复运行;(4)输送电机运行流程:检测到有件,机械臂不在右侧位,或机械臂在右侧位,夹爪升到位运行,运行计时5秒后,物体运出,电机停止,等待下一次搬运;2、手动运行:机械臂伸缩、左右旋转;夹爪的升降、夹紧松开;输送电机均可;并考虑必要的条件联锁,如旋转要考虑左右限位的联锁。3、手动/自动切换:自动运行中,任何状态下切换到手动,自动立即停止,要重新进入自动,必须手动操作,恢复到初始状态。四、I/O分配表表10-1机械手装配搬运流水线控制的I/O分配表输入输出I0.0复位X0Q0.0臂后限位L0指示I0.1启动X1Q0.1臂前限位L1指示I0.2停止X2Q0.2夹爪上限位L2指示I0.3臂后限位L0Q0.3夹爪下限位L3指示I0.4臂前限位L1Q0.4夹爪夹紧到位L4指示I0.5夹爪上限位L2Q0.5臂左限位L5指示I0.6夹爪下限位L3Q0.6臂右限位L6指示I0.7夹爪夹紧到位L4Q0.7检测1L7指示I1.0臂左限位L5Q1.0检测2L8指示I1.1臂右限位L6Q1.1臂缩回L9I1.2检测1L7Q1.2臂伸出L10I1.3检测2L8Q1.3夹爪上升L11Q1.4夹爪下降L12Q1.5臂左转L13Q1.6臂左转L14Q1.7输送电机L15五、I/O接线图图10-1机械手装配搬运流水线系统I/O接线图24VCPU226CNX0X1I0.0Q0.0I0.1Q0.4Q0.3Q0.2Q0.11L2M1ML6L0L32LL1L4L5L2Q0.5Q0.612VFUX2L0-X3L1-X4L2-X5L3-X6L4-X7L5-X8L6-X9L7-X10L8-X11I0.2I0.3I0.4I0.5I0.6I0.7I1.0I1.1I1.2I1.3Q0.7Q1.4Q1.3Q1.1Q1.0Q1.5Q1.6Q1.2Q1.7L13L7L10L8L11L12L9L15L14六、实训步骤1、将PLC主机上的电源开关拨到关状态,严格按图10-2所示接线,注意12V和24V电源的正负不要短接,电路不要短路,否则会损坏PLC触点。2、将电源线插进PLC主机表面的电源孔中,再将另一端插到220V电源插板。3、将PLC主机上的电源开关拨到开状态,并且必须将PLC串口置于STOP状态,然后通过计算机或编程器将程序下载到PLC中,下载完成后,再将PLC串口置于RUN状态。4、按照下列步骤进行实训操作:(1)启动后,L1绿灯亮,料斗K1灯亮。(2)拨上开关S2(指示灯亮),L1绿灯灭,L2红灯亮,电机M3、M2、M1依次点亮。(3)拨上检测开关S1(指示灯亮),料斗K1灭,料斗K2亮。(4)拨下检测开关S2(指示灯亮),电机M1、M2、M3依次灭,L1亮,料斗K1灯亮,恢复到(1)。七、实物接线图如图10-2所示机械手装配搬运流水线系统接线图。八、思考题根据上述控制要求,实现机械手任意状态,判定状态,进行自动运行?10-2机械手搬运系统接线图
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码








 poshter
poshter
本文标题:机械手搬运控制
链接地址:https://www.777doc.com/doc-5830812 .html