您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 2.4 机器人机身及行走机构
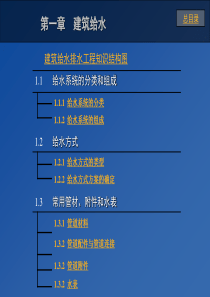
机器人机身及行走机构主讲郝建豹引言:机器人机械结构由三大部分构成:机身、手臂(含手腕)、手部。其中机身又称立柱,是支承臂部的部件。同时,大多数工业机器人必须有一个便于安装的基础部件,这就是机器人的基座,基座往往与机身做成一体。有些机器人需要行走,机身下面还会安装有行走机构。一、机身的自由度和运动1.机身的自由度:机身往往具有升降、回转及俯仰三个自由度。2.机身的运动:由上面三个自由度可以组合成机身五种运动形式。分别是:回转运动;升降运动;回转—升降运动;回转—俯仰运动;回转—升降运动—俯仰运动。3.各种坐标类型机身运动方案设计(1):圆柱坐标式机器人:这种类型的机器人主体结构通常具有三个自由度:一个回转运动(腰转)及两个直线移动(升降运动及手臂伸缩运动)。腰转运动及升降运动通常由机身来实现。3.各种坐标类型机身运动方案设计(2):球面坐标式机器人:这种类型的机器人主体结构通常具有三个自由度:绕垂直轴线的回转运动(回转运动)、绕水平轴线的回转运动(俯仰运动)及手臂的伸缩运动。通常把回转及俯仰运动归属于机身。3.各种坐标类型机身运动方案设计(3):关节坐标式机器人:这种类型的机器人主体结构的三个自由度均为回转运动,构成机器人的回转运动、俯仰运动和偏转运动。通常仅把回转运动归结为机身。3.各种坐标类型机身运动方案设计(4):直角坐标式机器人:这种类型的机器人主体结构具有三个自由度且都是直线运动。通常把升降运动或水平移动的自由度归为机身部分。二、机身典型结构1.回转与升降运动机身(1):链轮—液压缸机构:构成:主要由链轮机构、液压缸机构、机身本体部分构成。且升降机构位于转动机构的上方。工作原理:回转运动:通过液压缸活塞的移动→带动链条的移动→链轮的转动→机身的转动升降运动:活塞的上下移动→带动机身的上下升降链轮—液压缸机构图例:问题:要使立柱作大于360°的旋转,对活塞的行程有什么要求?每个液压缸只有一个油口。1.回转与升降机身(2):直线运动液压缸—摆动液压缸机构:构成:主要由直线运动液压缸、摆动液压缸、花键导向轴、机身本体等部分构成。工作原理:回转运动:摆动液压缸进油→摆动缸动片7摆动→带动摆动缸套5摆动由于花键轴3只起导向作用而不回转,摆动缸定片与花键轴之间通过平键和螺钉固定连接,保证定片的位置确定。升降运动:活塞1下腔进油→活塞推动机身沿花键轴上升活塞1上腔进油→活塞推动机身沿花键轴下降直线运动液压缸—摆动液压缸机构图例:问题:1、摆动液压缸的动片与缸的什么部件相连?机械臂将与摆动液压缸的什么部件相连?2、为什么采用长度较短的花键套导向?3、机身升降运动的行程和回转运动角度取决于什么?4、画出零件2的结构图。油口油口花键轴与花键孔:1.回转与升降机身(3):齿条活塞缸—升降缸机构:构成:主要由升降缸体、齿条缸、齿轮套筒、固定立柱和升降回转台等部分构成。工作原理:回转运动:齿条缸的齿条活塞杆直线运动→齿轮套筒6回转运动→齿轮套筒6和升降缸体2及升降回转台1固联→升降回转台1回转升降运动:升降缸体2、齿轮套筒6、回转台1整个一起升降运动齿条活塞缸—升降缸机构图例:2.回转与俯仰机身:机器人手臂的俯仰运动,一般采用活塞缸与连杆机构实现。手臂俯仰运动用的活塞缸位于手臂的下方,其活塞杆和手臂用铰链连接好,缸体采用尾部耳环或中部销轴等方法与立柱连接。回转与俯仰机身图例:三、机器人行走机构1.行走机构的构成:机器人行走机构通常由驱动装置、传动装置、位置检测装置、传感器、电缆和管路等构成。2.行走机构的分类:按运行轨迹分:分为固定轨迹式和无固定轨迹式两种。固定轨迹式主要用于工业机器人按行走机构的特点分:对于无固定轨迹机器人,可分为轮式、履带式和步行式等。前两者与地面连续接触,后者与地面为间断接触。3.固定轨道式机器人运动的实现:机器人机身底座,安装在一个可移动的拖板上,依靠丝杆螺母副的运动将来自电机的旋转运动转化为直线运动。4.车轮式行走机器人:分类:车轮式行走机器人通常有三轮、四轮、六轮之分。它们或有驱动轮和自位轮,或有驱动轮和转向机构,用来转弯。适用范围:最适合平地行走,不能跨越高度,不能爬楼梯。图2.57利用陀螺仪的二轮车三轮行走机器人图例:三轮行走机器人结构及驱动:构成:三个车轮、转向叉、驱动装置等。驱动方案:电机5驱动轮1:通过V1、V2的不同速度控制小车的移动方向,同时,转向叉3自动地转向正确的方向。此时轮2受到地面的摩擦而滚动。电机6驱动轮2:由电机6驱动,小车的方向由专用电机7驱动转向叉实现。此时轮1自由滚动。缺陷:施加在角落的力容易产生使机器人翻倒,对负载有一定的限制。图2.59所示的三组轮是由美国Unimationstanford行走机器人课题研究小组设计研制的。它采用了三组轮子,呈等边三角形分布在机器人的下部。图2.59三组轮四轮行走机器人:图2.60四轮车的驱动机构和运动图2.62所示为四轮防爆机器人,该轮系由于采用了四组轮子,运动稳定性有很大提高。但是,要保证四组轮子同时和地面接触,必须使用特殊的轮系悬挂系统。它需要四个驱动电机,控制系统也比较复杂,造价也较高。排爆机器人图2.63三角轮系的机构图图2.64(a)全方位方式;(b)转弯方式;(c)旋转方式;(d)制动方式5.履带式行走机器人:特点:可以在有些凸凹的地面上行走,可以跨越障碍物,能爬梯度不太高的台阶。没有自位轮,依靠左右两个履带的速度差转弯,会产生滑动,转弯阻力大,且不能准确地确定回转半径。履带式行走机器人图例(1):履带式行走机器人图例(2):救援机器人德国排爆机器人6.脚踏行走机器人:脚踏行走机器人即步行机器人,典型特征是不仅能在平地上,而且能在凹凸不平的地上步行,能跨越沟壑,上下台阶,具有广泛的适应性。主要设计难点是机器人跨步时自动转移重心而保持平衡的问题。两足步行机器人图例:控制特点:使机器人的重心经常在接地的脚掌上,一边不断取得准静态平衡,一边稳定的步行。结构特点:为了能变换方向和上下台阶,一定要具备多自由度。图2.65两足步行式行走机构原理图两足步行机器人图例:主要构成:1—框架2—大腿3—小腿4—脚5—肩6—肘7—手8—液压缸图2.66汉库科技公司的双足机器人步行式四足机器人图例(1):特点:四足机器人在静止状态下是稳定的,具有很高的实用性。四足机器人步行时,一只脚抬起,三只脚支撑自重,这时有必要移动身体,让重心落在三只脚接地点组成的三角形内。四足机器人图例(2):四足机器人图例(3):7.其它行走机器人:爬壁机器人:车轮和脚混合式机器人:其它行走机器人图例:4.其它移动方式军用昆虫机器人爬缆索机器人水下6000米无缆自治机器人蛇形机器人Classisover.Bye-bye!
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 oliver184
oliver184
本文标题:2.4 机器人机身及行走机构
链接地址:https://www.777doc.com/doc-5864485 .html