您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 机器人技术及应用ppt课件
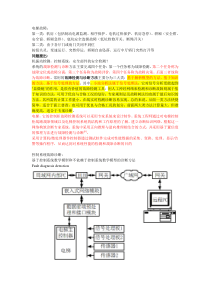
2020/7/51机器人技术及应用中国矿业大学徐海学院2/54联系方式主讲教师李富强办公室嘉园408QQ309738614电话13003521055邮箱lifqcumt@126.com3/54课程目的本课程介绍了机器人的前沿技术和发展趋势,重点讲述了机器人的执行机构、驱动系统、控制系统和检测系统。采用理论学习和实践并重的教学方法,着重培养学生的实际动手能力,通过熟悉机器人的开发流程与设计方法,使学生能够简易机器人制作的基本方法。此外在控制系统中增加了人工智能和路径规划等算法应用,使得基础较好的同学能够获得进一步的机器人设计的实践机会。4/54学时分配课程属性:专业选修课总学时数:32课内学时:32讲课学时数:24实验学时数:8学分:25/54课程大纲(约32学时)课次学时形式内容第1周2讲课机器人概述第1周2讲课机器人本体设计第2周2讲课机器人能源系统第2周2讲课机器人驱动系统一第3周2讲课机器人驱动系统二第3周2实验制作寻迹机器人底盘第4周2讲课机器人控制系统第4周2实验设计机器人控制器第5周4讲课机器人传感器系统一第6周2讲课机器人传感器系统二第6周2实验机器人传感器认知实验第7周4讲课机器人控制策略及算法研究第8周2讲课机器人各项赛事第8周2考试组装调试机器人6/54开放性实验地点:嘉园204内容:学生可以单独或者合作(最多3人)完成一个简单的机器人案例,可从下面的命题中选取,也可自己设计题目。•竞步机器人;•趋光机器人;•避障机器人。7/54考核方式和评分标准考核方式平时作业和表现(30%)+考试(70%)8/54机器人基础机器人的概念机器人的结构机器人发展方向机器人相关大赛4123机器人行业是二十一世纪最具有前景和挑战的行业.9/541机器人的概念1.1机器人是什么?1.2机器人是什么样子的?1.3机器人谁先发明的?1.4为什么要发明机器人?10/54机器人的概念11/541机器人的概念1)机器人是指南车.2)指南车是木头做的.3)指南车在我国黄帝期间就有了.4)指南车是为了满足指示方向用的.5)指南车首先应用于军事领域.12/54机器人的概念13/541机器人的概念1)机器人是火星车.2)火星车是由合金、橡胶等材料做成的.3)火星车是当代遥控机器人的顶峰.4)火星车是为了探索火星地质用的.5)火星车首先应用于探索领域.14/54机器人的概念15/541机器人的概念1)机器人是双足竞步机器人.2)竞步机器人是由铝合金等材料做成的.3)竞步机器人是当代类人机器人的先驱.4)竞步机器人是为了模仿人类行走设计的.5)我院的竞步机器人国内领先.16/54机器人的概念17/541机器人的概念1)机器人是机械大狗.2)机械大狗由镁铝合金等材料做成的.3)机械大狗是柴油发动机驱动的.4)机械大狗是为了运输战时物资用的.5)火星车首先应用于军事领域.18/54机器人的概念19/541机器人的概念1)机器人是骑车机器人.2)骑车机器人是由合金、橡胶等材料做成的.3)骑车机器人是当代控制领域的顶峰.4)骑车机器人是为了研究控制算法用的.5)骑车机器人首先应用于研究领域.20/541机器人的概念1.2机器人的共同点共同点:代替人进行工作;像人一样使用工具;由各种各样的复合材料制成;使用各种能源为系统驱动;21/541机器人的概念1.3机器人的定义1)美国机器人协会(RIA)定义:一种为了执行不同的任务而具有可改变和可编程动作的专门系统。”22/541机器人的概念1.3机器人的定义2)日本机器人协会(JIRA)定义:“机器人就是任何高级的自动机械”23/541机器人的概念1.3机器人的定义3)中国机器人定义:机器人是可以自动执行工作的复杂的机电综合装置。机器人可接受人类指挥,也可以执行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。24/541机器人的概念1.3机器人的定义4)国际标准化组织(ISO)定义:联合国标准化组织采纳了美国机器人协会给机器人下的定义:“是一种为了执行不同的任务而具有可改变和可编程动作的专门系统。”。25/541机器人的概念1.3机器人的定义现在,国际上对机器人的概念已经逐渐趋近一致。一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。26/541机器人的概念1.4机器人的发展史1)古代机器人机器人一词的出现和世界上第一台工业机器人的问世都是近几十年的事。然而人们对机器人的幻想与追求却已有3000多年的历史。人类希望制造一种像人一样的机器,以便代替人类完成各种工作。指南车西周伶人春秋木鸟希腊自动机记里鼓车写字机器人法国机器鸭自动机器玩偶木牛流马27/541机器人的概念1.4机器人的发展史2)现代机器人19201939194219481954196819981999200228/541.5机器人的分类操作型机器人:能自动控制,可重复编程,多功能,有多个自由度可固定或运动,用于相关自动化系统中。程控型机器人:按预先要求的顺序及条件,依次控制机器人的机械动作。示教型机器人:通过引导或其它方式,先教会机器人动作,输入工作程序,机器人则自动重复进行作业。智能机器人:以人工智能决定其行动的人。29/542机器人的结构任务控制系统驱动装置执行机构环境检测系统内部传感器外部传感器慎思反应层机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。30/542机器人的结构—控制系统控制系统有两种方式。一种是集中式控制,即机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息。31/542机器人的结构—检测系统检测系统的作用是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。32/542机器人的结构—执行机构执行装置就是按照电信号的指令,将来自电、液压和气压等各种能源的能量转换成旋转运动、直线运动等方式的机械能的装置。按利用的能源来分类,主要可分为电动执行装置、液压执行装置和气动执行装置。33/542机器人的结构—驱动装置驱动装置是接收控制系统信号,并将控制信号转换成能驱动执行装置运动电流或电压的器件。34/543机器人发展方向一、以为人服务作为发展要素;二、以仿生性,生物性的发展趋向;三、以人性化为最大发展目标。机器人的研究从一开始就是拟人化的,所以才有机械手、机械臂的开发与制作,也是为了以机械来代替人去做人力所无法完成的劳作或探险。但近十几年来,机器人的开发不仅越来越优化,而且涵盖了许多领域,应用的范畴十分广阔。其未来将向以下三个方面发展:35/543机器人发展方向一、以为人服务作为发展要素:二十年后,家中扫除、清洁的工作或老人的护理保健的工作可能全由机器人取代。医院已开始使用机器人为病人送药、配药的服务。还有,家居的全自动化,无需驾驶的自动汽车等等将会出现。36/543机器人发展方向二、以仿生性,生物性为发展趋向:以趣味性、生物性来制造机器狗、猫、鱼等动物。譬如日本三菱重工附属公司RyomeiEngineering研制成功的金色机械鱼“金鱼虎”长1公尺,重25公斤,是一只不小的巨鱼,能自动畅游于水中,可协助监察桥梁的保安和搜集鱼汛的情况,监视河水污染等。37/543机器人发展方向三、以人性化为最大发展目标:在世纪之交,生物遗传工程因“克隆人”的出现而引致伦理、法律及道德问题的争议,“克隆人”能否问世仍然是一个未知数,但机器人的研发正在取而代之,以越接近人性化为追寻目标。38/544机器人相关的竞赛1)中国青少年机器人大赛2)全国职业院校技能大赛机器人项目3)中国机器人奥林匹克大赛4)中国机器人CCTV公开赛5)中国机器人大赛暨RoboCup公开赛39/54中国机器人大赛暨RoboCup(机器人世界杯)公开赛是中国最具影响力、最权威的机器人技术大赛、学术大会和博览盛会,为当今中国、乃至亚洲机器人尖端技术竞赛、国际顶尖人才汇集的活动之一。北京、上海、广州、苏州、合肥、济南、中山等地成功举办了前十届大赛。为推进深圳产业升级,促进高交会向“世界科技第一展”目标迈进,2011年第十一届大赛拟移师深圳11月高交会期间举办。中国机器人大赛暨RoboCup公开赛40/54中国机器人大赛开幕式41/54中国机器人大赛——舞蹈机器人舞蹈机器人由参赛者自主设计,机器人构造、服饰及材料均不做限制。舞蹈机器人需在2~5分钟内自主完成各类动作。评委将从机器人设计、创意、舞步编排、动作复杂度、舞蹈和音乐的协调等方面进行综合评分。42/5443/54中国机器人大赛——双足竞步双足竞步机器人分为交叉足印、狭窄足印和自由体操三个组别。要求机器人在规定时间内完成行走、立正、卧下、前翻、后翻等各种指定动作,并行走至终点。其中,自由体操机器人要依次完成前胸翻、后胸翻、右转90度前胸翻、左转90度后胸翻、单手左掌上压、单手右掌上压、倒立等动作,具有较强的观赏性。44/54我院代表队在2010中国机器人大赛暨RoboCup公开赛中获双足竞步(交叉足印)项目组冠军45/54机器人世界杯足球赛的终极目标是:“到21世纪中叶.建立一支完全自治的、类人的机器人(humanoidrobot)足球队。并能在世界足联的官方比赛规则下击败人类最好的足球队。”促进人工智能、智能机器人与智能控制技术的研究和发展,突破的关键技术将推动工业和军事的发展。多学科领域的交叉与融合。Robocup的目标及意义46/54Robocup救援比赛青少年比赛Robocup的种类足球比赛仿真组仿真组足球机器人小型组机器人组舞蹈机器人中型组救援机器人类人组四腿组47/54RoboCup仿真足球比赛仿真比赛提供了一个完全分布式控制、实时异步多智能体的环境,通过这个平台,测试各种理论、算法和Agent体系结构,在实时异步、有噪声的对抗环境下,研究多智能体间的合作和对抗问题。48/54RoboCup小型组足球比赛每队5名队员在一个长5m宽3.5m的绿色场地上进行。比赛用球为橙色的高尔夫球。49/54机器人系统包括:视觉、决策、无线通讯和机器人车体四个子系统。彩色摄像机固定在场地上方4m处,并与场外的主机相连,采用无线通讯的方式向机器人发送命令。RoboCup小型组足球比赛50/54RoboCup中型组足球比赛两支各有多个机器人的球队在18(长)X12(宽)米的场地上进行比赛,每个机器人的尺寸小于50(长)X50(宽)X80(高)厘米。所有的机器人都是全自主的,即视觉、决策以及运动控制均由机器人本身处理。机器人之间用无线通讯来协调。场上的标记均为彩色标记:球为橘红色的,球门为黄色或蓝色,机器人本身带有粉色或天蓝色的色标以区分双方队员。51/54RoboCup中型组足球比赛52/54RoboCup中型组足球比赛53/54RoboCup中型组足球比赛54/54中型组的关键技术:自定位的方法感知和导航团体协作-多传感器获取相关的环境信息,然后进行数据融合,再建立分布式的外界模型运动机构的设计RoboCup中型组足球比赛55/54RoboCup四腿组四腿组即机器人采用四足结构来进行足球竞赛,自2008年以后,RoboCup采用标准平台来进行该项比赛。所有的球队在比赛中使用的相同(即标准)的机器人。因此,在使用的先进设备,最先进的机器人的硬件保障下,队员的精力可以集中在软件开发。要求四足机器人完全自主运作,不可有外部的人机控制。从今年开始,该比赛的转变地方在,以提供两个转租点方式从四条腿的索尼的AIBO(爱宝)到人形AldebaranNao(奥尔德巴伦闹)过渡。56/54RoboCup四腿组RoboCup四腿组规则简介RoboCup四腿机器人赛为双方对抗比赛。比赛在2.8M×1.6M的绿色场地上进行。四周有6个具有唯一颜色组合的圆柱体作为地标,球门的颜色也以黄色和蓝色唯一的加以区分。比赛双方各有三台机器人参加,全
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 1255ff
1255ff
本文标题:机器人技术及应用ppt课件
链接地址:https://www.777doc.com/doc-6334490 .html