您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 谈谈动力学建模的方法分解
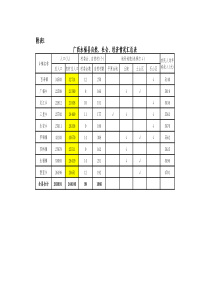
谈谈动力学建模的方法汇报人:XXX学号:1312XXXX指导教师:北京交通大学时间:2014年3月多体动力学仿真软件简介多体动力学建模中的基本概念客车模型的建立(simpack)客车模型仿真结果分析参考文献12345目录多体动力学仿真软件简介Adams(AutomaticDynamicAnalysisofMechanicalSystems)功能:对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。软件模块:多体动力学仿真软件简介UM(UniversalMechanism)功能:软件采用模块化的组织结构,相对独立的前后处理器,不仅能分析多自由度的刚体系统,还能分析复杂的刚柔耦合体系统,广泛应用于机械、汽车、机车车辆、航空航天、国防军工和机器人等领域。多体动力学仿真软件简介simpackSIMPACK软件是德国INTECGmbh公司(于2009年正式更名为SIMPACKAG)开发的针对机械/机电系统运动学/动力学仿真分析的多体动力学分析软件包。它以多体系统计算动力学(ComputationalDynamicsofMultibodySystems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件。SIMPACK软件的主要应用领域包括:汽车工业、铁路、航空/航天、国防工业、船舶、通用机械、发动机、生物运动与仿生等。动力学建模中的基本概念约束(constraint):对系统中某构件的运动或构件之间的相对运动所施加的限制称为约束。铰(joints):也称为运动副,在多体系统中将物体间的运动学约束定义为铰。力元(forceelement):在多体系统中物体间的相互作用定义为力元,也称为内力。力元是对系统中弹簧、阻尼器、致动器的抽象外力/偶(externalforce/moment):多体系统外的物体对系统中物体的作用定义为外力(偶)。物理模型(model):这里也称力学模型,由物体、铰、力元和外力等要素组成并具有一定拓扑构型的系统。拓扑构型(topology):多体系统中各物体的联系方式称为系统的拓扑构型,简称拓扑。物体(body):多体系统中的构件定义为物体。静平衡(preload):在与时间无关的力作用下系统的平衡,称为静平衡。静平衡分析一种特殊的动力学分析,在于确定系统的静平衡位置。连体坐标系(bodyreferenceframe):固定在刚体上并随其运动的坐标系,用以确定刚体的运动。刚体上每一个质点的位置都可由其在连体坐标系中的不变矢量来确定。广义坐标(inertialsystem):唯一地确定机构所有构件位置和方位即机构构形的任意一组变量。动力学建模中的基本概念数学模型:分为静力学数学模型、运动学数学模型和动力学数学模型,是指在相应条件下对系统物理模型(力学模型)的数学描述。机构:装配在一起并允许作相对运动的若干个刚体的组合。运动学:研究组成机构的相互联接的构件系统的位置、速度和加速度,其与产生运动的力无关。运动学数学模型是非线性和线性的代数方程。动力学:研究外力(偶)作用下机构的动力学响应,包括构件系统的加速度、速度和位置,以及运动过程中的约束反力。动力学问题是已知系统构型、外力和初始条件求运动,也称为动力学正问题。动力学数学模型是微分方程或者微分方程和代数方程的混合。逆向动力学:逆向动力学分析是运动学分析与动力学分析的混合,是寻求运动学上确定系统的反力问题,与动力学正问题相对应,逆向动力学问题是已知系统构型和运动求反力,也称为动力学逆问题。自由度(degreeoffreedom):确定一个物体或系统的位置所需要的最少的广义坐标数,称为该物体或系统的自由度。约束方程:对系统中某构件的运动或构件之间的相对运动所施加的约束用广义坐标表示的代数方程形式,称为约束方程。约束方程是约束的代数等价形式,是约束的数学模型。建模的前准备知识(以simpack软件铁路客车建模为例)图1simpack软件求解的流程图建模的前准备知识(以simpack软件铁路客车建模为例)图2动力学四个基本元素解释图建模的前准备知识(以simpack软件铁路客车建模为例)图3铁路坐标系示意图图4轨道车辆的拓扑关系示意图建模的前准备知识(以simpack软件铁路客车建模为例)建模的主要步骤1.画出模型的拓扑图2.明确物体(body)、铰接(joints)、力元(forceelement)、marker(标志点)、轨道(track、rail)等的参数。3.按照预定参数建立模型4.模型预平衡5.查看模型仿真结果客车模型的建立(simpack)1.建立子结构(substructures):轮对。2.由于软件中预置了Rail_Wheelset模块,故只需选择并命名为“Wheelset”图5simpack自动生成的客车轮对:客车模型的建立(simpack)3.定义线路:线型:直线——缓和曲线——圆曲线——缓和曲线——直线线路参数:半径=300m、超高=0.11m3.1定义曲线半径:在模型树中选择Tracks→$Trk_Track→horizontal图6曲线半径的定义客车模型的建立(simpack)3.2定义曲线超高:在模型树中选择Tracks→$Trk_Track→superelevation图7曲线超高的定义客车模型的建立(simpack)3.3定义竖曲线:在模型树中选择Tracks→$Trk_Track→vertical图8竖曲线的定义客车模型的建立(simpack)4读入/加载激励(excitations),激励可以从已有文件读入,也可以手动加载轨道不平顺:横向、垂向、侧滚、轨距;轮轨不平顺:左右横向、左右垂向、左右侧滚图9横向激励的加载图客车模型的建立(simpack)6建立客车模型6.1画出客车主模型拓扑图、转向架子结构拓扑图图10主模型拓扑图客车模型的建立(simpack)图11转向架子结构拓扑图客车模型的建立(simpack)7定义轮对上的marker:$M_Wheelset_R(0,1,0)和$M_Wheelset_L(0,-1,0)8创建转向架模型“BOGIE”9定义构架上的一系力(一系悬挂:primarysuspension)用marker:图12一系悬挂上的marker位置示意图序号名称坐标1$M_BF_FR(1.25,1,-0.46)2$M_BF_FL(1.25,-1,-0.46)3$M_BF_RR(-1.25,1,-0.46)4$M_BF_RL(-1.25,-1,-0.46)客车模型的建立(simpack)10导入子结构:轮对前轮对:$S_WS_F,轨道纵向s:longitudinal设为1.25后轮对:$S_WS_R,轨道纵向s:longitudinal设为-1.25图13导入轮对后的转向架模型客车模型的建立(simpack)11定义一系力(primarysuspension,铰接从转向架道轮对),类型,5:spring-dumpingparallelcmp12定义虚车体DUMMY,在虚车体上建立marker:$M_Isys_DUM(0,0,-1)13定义二系力(secondarysuspension)用marker:二系力作用在车体和构架之间,左右各一个。①先在构架BF上建立marker:$M_BF_R(0,1,-0.8)、$M_BF_L(0,-1,-0.8)②再在虚车体DUM上建立marker:$M_DUM_R(0,1,0.2)、$M_DUM_L(0,-1,0.2)③定义二系力5:Spring-DumpingParallelCmp一系力fromto$F_PS_FR$M_BF_FR$S_WS_F.$M_Wheelset_R$F_PS_FL$M_BF_FL$S_WS_F.$M_Wheelset_L$F_PS_RR$M_BF_RR$S_WS_R.$M_Wheelset_R$F_PS_RL$M_BF_RL$S_WS_R.$M_Wheelset_L二系力fromto$F_SS_R$M_DUM_R$M_BF_R$F_SS_L$M_DUM_L$M_BF_L客车模型的建立(simpack)14创建车体“VEHICLE”,并定义车体body、geometry15定义车体上marker,根据拓扑图可知,建立前后两个marker:$M_VEHICLE_F(9,0,-1)、$M_VEHICLE_R(-9,0,-1)16导入子模型“前、后转向架”。并修改铰接:前转向架的纵向位置Joints→$J_BF_Fs:longitudinalposition+9后转向架的纵向位置Joints→$J_BF_Rs:longitudinalposition-9前转向架的前后轮对Joints→$J_Wheelsets:longitudinalposition±1.25+9后转向架的前后轮对Joints→$J_Wheelsets:longitudinalposition±1.25-9客车模型的建立(simpack)图14装配完成时的车体图客车模型仿真结果分析17预平衡(preload)由于模型在静止时完全中心对称,不存在偏心问题,所以只需计算车体在垂向z的preload图15预平衡计算后车体的残余加速度的结果图因为残余加速度(residualacceleration)最大是-4.84626e-110.001m/s2,说明模型已经平衡客车模型仿真结果分析18查看模型的仿真结果:客车的曲线通过性能1.定义线路:线型:直线——缓和曲线——圆曲线——缓和曲线——直线2.线路参数:半径=300m、超高=0.11m、各段长度50m、50m、50m、50m、100m3.定义初速度:Globals→VehicleGlobals,初速度定义为70km/h4.定义求解器:SolverSettings→$SLV_SolverSettings,选择仿真时间15s,采样频率200Hz5.查看前轮对左边轮轨作用力图16前转向架前轮对轮轨垂向力Q、轮轨横向力Y示意图客车模型仿真结果分析图17客车初速度为70km/h时客车的脱轨系数客车模型仿真结果分析6其他条件不变,将初速度改为120km/h查看结果客车模型仿真结果分析图18前转向架前轮对轮轨垂向力Q、轮轨横向力Y示意图客车模型仿真结果分析图17客车初速度为70km/h时客车的脱轨系数参考文献[1]缪炳荣、方向华、傅秀通、罗世辉.SIMPACK动力学分析基础教程[M].成都:西南家庭的心出版社,2008.[2]周素霞、陶忠勇、张志华、杨继震.SIMPACK9实例教程[M].北京:北京联合出版社,2013.[3]崔圣爱.基于多体系统动力学和有限元法的车桥耦合振动精细化仿真研究[D].西南交通大学,2009.DOI:10.7666/d.y1689366.
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 feifeifa123
feifeifa123
本文标题:谈谈动力学建模的方法分解
链接地址:https://www.777doc.com/doc-6391653 .html