您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 《结构分析中的有限元法》2015-有限元习题-参考答案
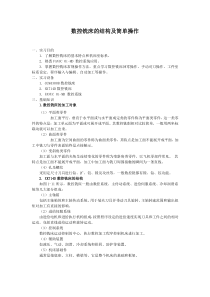
本科有限元习题参考答案2015年3月10日作业1、简述力学课程中介绍的各种力学模型的简化条件、基本假设和适用范围(包括有拉压杆模型、弯曲梁模型、平面应力和平面应变模型、轴对称模型、板模型、壳模型等)2、给出弹性力学问题中平衡方程、几何方程、物理方程的表达式及其意义。(1)平衡方程:力学模型简化条件基本假设适用范围拉压杆线弹性,无塑性变形拉压平面假设拉伸或压缩的轴向二力杆弯曲梁弯曲为主要变形的曲杆弯曲平面假设单向受力假设弯曲为主要变形的曲杆平面应力平面应变微体所受所有外力均在同一平面;构件内一点外侧变形均在同一平面理想弹性体只有平面应力分量在仅为x,y函数;只有平面应变存在仅为x,y函数;轴对称具有对称性对称的理想弹性体弹性体几何形状、约束情况、及所受外力都对称于某一轴板板厚远小于其他两个方向的尺寸弹性体板件壳曲面薄板弹性体壳体zyyzxzzxyxxyzyzxzzyxyzyyxzxyxxfyxzfxzyfzyx,000,物理意义:应力分量与体力分量之间的关系。(2)几何方程:zuxwywzvxvyuzwyvxuzxyzxyzyx,,,,物理意义:应变分量与位移分量之间的关系。(3)物理方程:zxzxyzyzxyxyyxzzzxyyzyxxGGGEEE1,1,1)(1)(1)(1物理意义:应变分量与应力分量之间的关系。3、简述最小势能原理的主要内容和主要公式。根据虚功原理得到:ΓTΩTT0TdΓδudΩ)Fδu-σδε(,由)(21UTT则0)21(()TdudFuTTTp其中,TdudFuTTTp)21(即为系统的总势能,它是弹性体变形势能和外力势能之和。上面变分为零式表明:在所有区域内满足几何关系,在边界上满足给定位移条件的可能位移中,真实位移使系统的总势能取驻值(可证明此驻值为最小值)。4、“有限元法”都有哪些名称(包括中文和英文)?有限元法,也叫有限单元法、有限元素法、有限元分析;FEM(FiniteElementMethod)、FEA(FiniteElementAnalysis)5、简述有限元法的发展和现状。近几十年,伴随着计算机科学和技术的快速发展,有限元法作为工程分析的有效方法在理论、方法的研究、计算机程序的开发以及应用领域的开拓者方面均取得了根本性的发展。(1)单元的类型和形式为了扩大有限元法的应用领域,新的单元类型和形式不断涌现(等参元,梁板壳,复合材料)(2)有限元法的理论基础和离散格式将Hellinger-Reissner、Hu—Washizu(多场变量变分原理)应用于有限元分析,发展了混合模型、杂交型的有限元表达格式,应研究了各自的收敛条件;将加权余量法用于建立有限元的表达格式;进一步研究发展有限元解的后验误差估计和应力磨平方法。(3)有限元方程的解法(大型复杂工程结构问题——静态,特征值,瞬态等)(4)有限元法的计算机软件(专用软件,通用软件)6、结构力学分析问题中的三种“非线性”都包含哪些,并解释其含义。非线性可以是由材料性质、变形状态和边界接触条件引起的,分别称为材料、几何、边界非线性。材料非线性就是材料的本构关系不是线性的。几何非线性时结构在载荷作用过程中产生大的位移和转动,如板壳结构的大挠度。边界非线性是指高挠度部件或由多个部件组成的结构组合件,渐进位移将会增大部件自身或是部件之间产生接触的可靠性,以此特征的特定类型几何非线性为边界条件或者接触非线性。7、简述有限元法的未来。以有限元法为代表的计算力学提出一系列新的课题:(1)为了真实地模拟新材料和新结构的行为,需要发展新的材料本构模型和单元型式。例如对于特种合金、复合材料、陶瓷材料、机敏材料、智能材料、生物材料以及纳米材料等。(2)为了分析和模拟各种类型和形式的结构在复杂载荷工况和环境作用下的全寿命过程的响应,需要发展新的数值分析方案。如:多重非线性(材料、几何、边界等)相耦合的分析方法;多场(结构、流体、热、电、化学)耦合作用的分析方法;跨时间/空间多尺度;非确定性(随机/模糊)的分析方法;自适应的分析方法。(3)有限元软件和CAD/CAM等软件系统共同集成完整的虚拟产品开发(VPD)系统。这个系统强烈影响着未来工程系统的设计、制造、和运行,主要体现在:①它能提供对所设计的工程系统从加工制造到运行,直至失效和破坏的全寿命过程的更深入认识,从而能更好地识别它的属性和特征。②它能够鉴定和评估所设计对象的性能和质量,并允许以最低的费用在设计过程中就对所设计的对象进行修改和优化。③它能显著地缩短工程对象设计和投产的周期,降低生产成本,提高市场竞争力。2015年3月17日作业1、简述有限元法的基本思想,并结合简单结构来说明。(1)有限元法,也叫有限单元法,它的基本思想是将一个结构或连续体的求解域离散为若干个子域(单元),并通过它们边界上的结点相互联结成为组合体。(2)有限元法用每一个单元内所假设的近似函数来分片地表示全求解域内待求的未知场变量。而每个单元内的近似函数由未知函数或其导数在单元各个结点上的数值和与其对应的插值函数来表示。由于在联结相邻单元的结点上,场函数应具有相同的数值,因而将它们用作数值求解的基本未知量。这样一来,求解原来待求场函数的无穷自由度问题转换为求解场函数结点值的有限自由度问题。(3)有限元法是通过和原问题数学模型(基本方程、边界条件)等效的变分原理或加权余量法,建立求解基本未知量(场函数的结点值)的代数方程组或微分方程组。此方程组称为有限元求解方程,并表示成规范的矩阵形式。接着用数值方法求解此方程,从而得到问题的解答。2、简述结构离散(或有限元建模)的内容和要求。有限元建模的内容:1)网格划分---即把结构按一定规则分割成有限单元2)边界处理---即把作用于结构边界上约束和载荷处理为结点约束和结点载荷有限元建模的要求:1)离散结构必须与原始结构保形---单元的几何特性2)一个单元内的物理特性必须相同---单元的物理特性3、简述结点力和结点载荷的差别。结点力:单元与单元间通过结点的相互作用力。结点载荷:作用于结点上的外载荷。4、列表给出有限元几类基本单元的图形、结点数、结点自由度数和单元总自由度数(包括杆单元、梁单元、平面三角形单元、平面四边形单元、轴对称问题三角形单元、四边形壳单元、四面体单元)。单元类型单元图形结点数结点自由度杆单元225、写出适用于插值下表的基函数,并给出拉格朗日插值多项式。x1/31/41fx2-17基函数:29245181311413141)31(2xxxxlk,31636416)41(2xxlk,61672)1(2xxlk根据拉格朗日插值多项式:)()()()()()(000knknkjjjkjnknkknxfxxxxxpxfxlxp或。将2n带入:335634938-)(22xxxp梁单元23平面单元32平面四边形42轴对称问题32板壳单元46四面体单元432015年3月24日作业1、为了保证有限单元法解答的收敛性,位移函数应满足哪些条件?完备协调元、非协调元和完备元分别是什么意思?为了保证有限单元法解答的收敛性,位移函数应满足:1)位移函数必须包括单元的刚性位移(即常量项);2)位移函数必须包括常量应变(即线性项);3)位移函数在单元内部必须连续(连续性条件);4)位移函数应使得相邻单元间的位移协调(协调性条件)注:上述四个条件称为有限元解收敛于真实解的充分条件;前三个条件称为必要条件。满足四个条件的位移函数构成的单元称为完备协调元;满足前三个条件的单元称为非协调元;满足前两个条件的单元称为完备元。2、如下图所示4结点平面应力单元,结点1~结点4对应的结点坐标分别为(0,0),(0,1),(2,0),(2,1),结点1~结点4对应的结点位移分别为(u1,v1),(u2,v2),(u3,v3),(u4,v4),试基于拉格朗日插值基函数构造如下单元的位移函数。解:根据拉格朗日插值基函数:44332211),(),(),(),(),(uyxluyxluyxluyxlyxuxyyxlyxyxlyxyxlyxyxyxl21),()1(21),()2(21),()1)(2(21)10)(20()1)(2(),(432110,020,132,042,1所以:432121)1(21)2(21)1)(2(21),(xyuuyxyuxuyxyxu同求:),(yxv。3、说明有限元方法解误差的主要来源?答:影响有限元解的误差:1)离散误差。边界上以直线代曲线导致离散化模型与实际物体的差异;2)位移函数误差。一般情况下单元位移函数不可能与实际单元的位移场一致;3)计算机计算误差。计算机字长的限制、相差悬殊的数值加减运算。4、说明用有限单元法解题的主要步骤。答:研究问题的力学建模;结构离散;单元分析;整体分析与求解;结果分析及后处理。5、推导基于变分原理的总势能泛函极值条件。解:有积分形式确立的标量泛函有,,dE,,duuΠFuΩuxx其中u是未知函数,F和E是特定的算子,是求解域,是的边界。Π称为未知函数u的泛函,随函数u的变化而变化。连续介质问题的解u使泛函Π对于微小的变化u取驻值,即泛函的“变分”等于零0Π,此为变分法。将虚功原理用于弹性变形时,总功W要包括外力功(T)和内力功(U)两部分,即:W=T-U;内力功(-U)前面有一负号,是由于弹性体在变形过程中,内力是克服变形而产生的,所有内力的方向总是与变形的方向相反,所以内力功取负值。根据虚功原理,总功等于零得:T-U=0,即外力虚功T=内力虚功U弹性力学中的虚功原理可表达为:在外力作用下处于平衡状态的弹性体,如果发生了虚位移,那么所有的外力在虚位移上的虚功(外力功)等于整个弹性体内应力在虚应变上的虚功(内力功)。根据虚功原理得到()0TTTddεuFuT1()02TTTpdduFuT其中的p即为总势能泛函。由上面变分为零式表明:在所有区域内满足几何关系,在边界上满足给定位移条件的可能位移中,真实位移使系统的总势能取驻值(可证明此驻值为最小值)。此即总势能泛函的极值条件。2015年3月31日作业1、给出利用最小势能原理建立单元有限元静力平衡方程的一般推导过程。解:由单元位移函数:eu=Nu式中:N为插值函数(或称形函数),得到单元内的应变和应力分别为eε=Bueeσ=Dε=DBu=Su其中D为弹性矩阵,它完全取决于弹性常数E和。将位移、应力和应变代入势能泛函有1(d)(d)(d)2eTTeeTTeTTuuBDBuNFuNT根据最小势能原理,势能泛函取驻值的必要条件:(d)(d)(d)0TeTTeTBDBuNFNTu式中dTeBDBK称为单元刚度矩阵,dTeVNFf称为体积力等效结点力,dTeSNTf称为面力等效结点力,则上式可写成单元平衡方程:eeeKuf此式即单元有限元静力平衡方程。2、利用最小势能原理推导结构(假设包含N个单元)有限元静力平衡方程。解:利用弹性体所有单元的总势能最小,将所有单元进行组装后即可形成整个结构的有限元静力平衡方程。为此先需要建立单元结点位移向量和总体结点位移向量之间的对应关系,即iiu=Tu式中:iu表示第i个单元的结点位移向量;Tu是总体结点位移向量;矩阵iT是第i个单元的结点位移提取矩阵。对于杆单元可以表示为12[,]Tiiiuuu121[,,,]
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 kukumalu小叶子
kukumalu小叶子
本文标题:《结构分析中的有限元法》2015-有限元习题-参考答案
链接地址:https://www.777doc.com/doc-7386662 .html