您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 浅析汽车白车身焊装线设计(1)
剖析汽车白车身焊装线设计随着近年来家用轿车的普及,汽车制造技术的飞速发展,自动化焊接技术在汽车白车身的生产中,起到了越来越重要的作用。在我国,白车身焊装工艺设计的主要难点在于焊装生产线的设计,即采用哪种形式的输送系统和总拼焊接夹具,更有利于提高产能,更加环保,更加经济实惠。白车身焊装线的结构我国目前使用的车身焊装线主要是由机器人、输送部分、工装夹具、焊接设备及其他辅助设备等部分组成,主要结构形式有:交叉臂步进式、摆臂步进式、滑橇输送式、台车输送式及高速辊床等。1、交叉臂步进式焊装输送线图1中调频电机通过齿轮齿条传动将动力传递给往复杆,由此实现工件的水平输送。而工件的上下运动则由双作用气缸推动楔铁平移实现交叉臂机构的升降运动来完成,因此,输送线的重复精度主要取决于楔铁的精度,但是,由于楔铁需要承受较大的摩擦,必须定期更换;同时,往复杆的升降运动靠气缸作用于楔铁运动来实现,其冲击力和噪声较大。图12、摆臂步进式输送线从图2中可以看出,工件的水平输送是通过调频电机驱动齿轮齿条做往复运行实现的,顶升、落下装置采用电机带动曲柄旋转180度,从而实现输送线本体顶升、落下。其运行过程与交叉臂步进式相同,只是驱动力由气缸驱动楔铁改为电机驱动曲柄,同时辅以气缸支撑,这样既保证了线体上下运动的平稳性,又消除了交叉臂步进式焊装输送线升降时带来的噪声。这种形式的焊装线结构简单合理、稳定性好、辅助时间较短、重复定位精度较高,基本满足点、弧焊机器人的使用条件,适用于生产能力为5~10万辆/年的生产线。目前,国内很多汽车厂采用该形式的焊装线,如东风天龙白车身总焊线、地板线;哈飞中意微面的左右侧围总成、白车身总焊线;哈飞路宝、柳微的SPARK白车身总焊线。图23、滑橇输送线该焊装线通过采用往复杆或辊床输送滑橇来实现工件水平输送,可分为两种形式:往复杆输送滑橇式和辊床输送滑橇式。工件上、下运动一般由固定工位的气动或液压顶升装置实现,工件的下线靠电动葫芦或自行电葫芦完成。滑橇上装有定位装置,重复定位精较高,一般为±0.3mm,基本满足点、弧焊机器人的使用条件。该工艺布置灵活性较高,可在任意工位通过设置90度~180度旋转机构进行分支,容易实现柔性化改造和产能提升改造,另外,对厂房的长度限制不如先前两种线体要求严格。目前,此类输送线在国内的轿车厂应用较多,如神龙公司的206车型的地板线、侧围线、车门线、白车身总焊线;东风本田CRV、思域车型等。图34、台车式输送焊装线该线水平输送工件是通过电动机驱动台车在钢轨上运行或人工推动台车在轨道中运行,工件或台车顶升、落下采用气缸顶升装置实现。这种焊装线可分为整轨式和分轨式两种,主要优点是:结构简单可靠、工装设备投资较少、占厂房面积小;但输送线节奏较慢、重复输送精度较低、很难满足点、弧焊机器人的基本应用要求。车身焊装线的选择对于白车身焊装线结构形式的选择,首先必须考虑产品的寿命周期、档次、年生产能力及投资规模等,其次结合本单位的现有硬件条件(如厂房、布局等),最后要考虑现有的工艺水平和目前国内或本地区的加工能力等,对诸多因素进行综合比较来选择。选择何种形式的焊装线须根据具体的设计条件、产品质量要求、产品结构和工艺来确定。选择白车身焊装线时主要考虑以下几方面因素:1)生产纲领和产品结构的复杂性;2)产品性质和工艺水平;3)投资规模、车间面积、工装设备的维修保养技术水平。在这些众多影响因素中,其中生产纲领和产品性质起着决定性作用。其它因素的作用也很重要,权衡利弊,最后选定一个合理的焊装线。车身总拼焊装夹具的选择对于白车身而言,其总焊线的装焊工艺主要由预装配、点定、补焊三部分组成,其中点定工序最为关键。焊装生产线中的总焊夹具决定了白车身的质量、生产线的柔性度及生产节拍等。目前,国内所采用的总拼焊接夹具主要有以下5种形式:1、平移式夹具(如图3所示),其动作顺序为:输送线将预装白车身送入总焊工位定位夹紧点定,输送线抬起,将点定成形的车身水平送入后续的工序补焊。此类夹具定位精度和可靠性高,可适用于单排、双排、卧铺车的宽窄、高低系列的大批量混流生产、柔性度高。2、铰链翻转式夹具(如图5所示),此类夹具和平移式夹具的工作原理类似,唯一的区别是左右侧围总成的定位组件的打开方式不同:平移式夹具沿垂直于线体输送方向水平移动,而铰链翻转式夹具则是绕铰链轴旋转打开,这样便于线体输图4送、装配及定位夹紧。3、Robotgripper总拼形式(1)Robotgripper形式一——Robotgate(见图8),其通过机器人搬运抓手夹具,然后抓手夹具对车身进行定位。左、右侧部抓手和后部抓手之间相连接,成为一个整体框架。机器人通过抓取不同的抓手来实现对不同车型的成形,从而实现多种车型的柔性化生产。整个总拼由3个工位组成,生产线长20m,宽15m。其中,主工位长8m,宽15m。受工位面积的限制,此形式适用于3种及以下车型,图5且顶盖不属于此工位焊接的情况。(2)Robotgripper形式二——Bodyflexor(见图9),它与Robotgate形式类似,也是通过机器人搬运抓手夹具,实现对车身的定位。其不同之处在于其侧部抓手结构形式,其左、右侧部抓手分为前后两个独立部分,这对于同一车型的两厢、三厢车转变及车身长度较长的车型更具灵活性。每个车型侧围由4个专用抓手夹具定位,由机器人抓取4个侧围定位抓手包络住整个车身。4个抓手安装在两侧的底座上,4个抓手之间也相互锁紧,以保证重复定位精度。左右各布置4台机器人,前后龙门架各布置1台机器人焊接顶盖横梁的焊点。当顶盖在总拼工位焊接时,需布置二层钢结构以布置更多机器人完成上部焊点的焊接。4、立柱式夹具这种类型夹具结构简单、成本低廉、维修方便、操作时接近性好,但其定位精度较低,不适用于自动化程度较高的大批量生产和采用焊接机器人的生产线。图6图7提高焊装线柔性度的有效途径目前,在国内企业中,同一焊装线上只能进行同类型或相似类型的车身焊接,即在基础车型上实现宽窄、长短、高低变换的各车型共线生产,要实现不同车身共线生产,首先需要保证不同车身下部总成的定位需求。当各车型地板定位差异不大时,可以采用机械切换的方式。根据每个车型定位孔的相对位置不同,通过切换夹具定位机构来实现。实现夹具定位机构切换有多种方法,例如可以针对不同车身的定位孔设计多组定位机构,当一组定位机构升起进行定位时,另几组定位机构下降进行避让;也可以针对不同车身定位孔(孔径相同)设计一组定位机构,通过切换其位置来实现不同车型的定位。当各车型地板定位孔差异较大时,可以引进数控定位技术(NClocator)。这种数控定位单元有3个平移自由度,以伺服电动机作为驱动机构,通过控制系统程序控制其运动轨迹,其控制原理类似于工业机器人,定位精度可达0.1mm,足以满足车身定位要求。这种切换方式从理论上讲可以实现无数种车身下部总成的定位,但前提是各车型的孔位差异在NC轴的活动范围以内且定位孔孔径相同,数控定位技术的应用如图3所示。然而,NClocator系统成本较高,一般建议当各车型地板定位差异较大时,应用于地板及车身的定位焊工位,也有公司在整条主线上应用,因此,提高焊装线的柔性化生产能力,是提高企业市场竞争力的重要途径,可以从以下几方面进行考虑:1)传输装置中的托架采用柔性化设计,可随时根据生产的车型或者即将转型的车型对托架进行调整。2)夹具结构的柔性设计。可将不同车型的定位夹紧部件置于同一夹具中,通过电气控制来实现不同车型的柔性生产。3)柔性焊装线的总装夹具通常采用图4平移式夹具,不同的是左、右侧围定位组件是四面体定轴360°旋转,每一面夹具通过定轴连杆机构旋转最少可变换两种车型,这样总装夹具可实现对8个车型的焊接。提高焊装线柔性度的途径有自身因素的制约,也有外在因素的制约,只有把现代焊接技术有机地结合起来,才能达到预期的目的。作为一个好的焊装工艺规划者,不能盲目追求技术的先进性,需要综合产品特性、节拍要求、项目预算、厂房限制、质量目标、物流方向及安全等因素,同时也要与产品研发、同步工程和尺寸工程等部门进行充分沟通,选择一个最合适、性价比最高的柔性焊装线规划方案。通过不断地引进和吸收先进的汽车制造技术,我国的汽车白车身焊装生产线设计、制造水平会不断提高,在白车身焊装工艺方面形成了汽车制造企业各自的技术特色,但白车身的焊装工艺是一个系统工程,特别是标准化和模块化设计方面还需要我们行业相关人员付出更多的努力,以促进我国汽车焊装技术的发展和进步,早日达到发达国家的技术制造水平。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
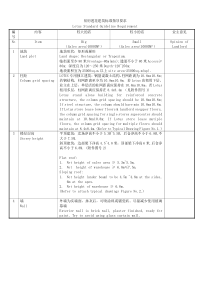



![[管理制度]宁波市药品生产企业日常监督管理办法(试行)(doc 17页)(1)](/doc-563272.png)
 siooer
siooer
本文标题:浅析汽车白车身焊装线设计(1)
链接地址:https://www.777doc.com/doc-1217350 .html