您好,欢迎访问三七文档
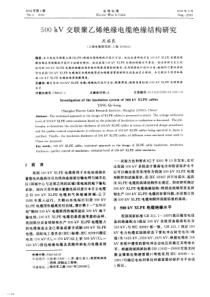
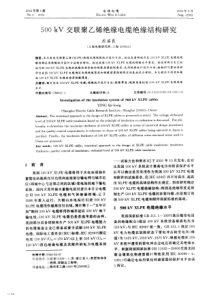
高等职业教育机械类专业核心技术课程机械设计基础浙江机电职业技术学院胡家秀郑州铁路职业技术学院徐刚涛教学课件编创制作第九章轮系第一节概述第二节定轴轮系传动比的计算第三节行星轮系传动比的计算⊙第四节混合轮系传动比的计算第五节轮系的功用⊙第六节K-H-V型行星轮系简介第一节概述根据轮系运转时齿轮的轴线位置相对于机架是否固定,轮系基本可分为两大类:定轴轮系与行星轮系。此外,还有由部分定轴齿轮传动与行星齿轮传动组合而成的混合轮系。平面定轴轮系空间定轴轮系定轴轮系定轴轮系运动简图示例平面定轴轮系空间定轴轮系惰轮行星轮系视频运动简图示意行星轮系按复杂程度分行星轮系按自由度分简单行星轮系(F=1)差动行星轮系(F=2)混合轮系第二节定轴轮系传动比的计算一、轮系传动比计算的目的确定两齿轮间传动比,或借助传动比计算确定轮系中各齿轮的转速及转向。二、轮系传动比计算需解决的两个要件1.传动比i的大小;2.输出轮(齿轮)的转动方向。平行轴线齿轮传动(外啮合)i=n1/n2=-z2/z1平行轴线齿轮传动(内啮合)i=n1/n2=+z2/z1定轴锥齿轮传动大小:i=n1/n2=z2/z1方向:箭矢简单定轴轮系中的齿轮转向(箭矢标注法)复杂定轴轮系中的齿轮转向(箭矢标注法)大小:i14=n1/n4=i12·i23·i3′4=(n1/n2)(n2/n3)(n3′/n4)=(z2/z1)(z3/z2)(z4/z′3)=z3z4/z1z′3转向:如箭矢所指方向提升装置(含锥齿轮传动、蜗杆传动)的复杂定轴轮系含锥齿轮传动的复杂定轴轮系二、定轴轮系传动比计算综合PPT9与PPT10例图,定轴轮系传动比计算规律如下:1.对仅含平行轴线齿轮传动的定轴轮系设首轮为1,未轮为k,外啮合齿轮的对数为m,则从首轮到未轮所有从动轮齿数的乘积i1k=n1/nk=(-1)m从首轮到未轮所有主动轮齿数的乘积讨论:(1)若i1k终值为“+”,表示首未轮转向相同;为“-”,表示首未轮转向相反。(2)这类轮系也可用普适方式进行计算:先计算传动比大小,用箭矢标注法确定各轮转向。定轴轮系传动比计算综合PPT9与PPT10例图,定轴轮系传动比计算规律如下:2.对包含非平行轴线齿轮传动的定轴轮系采用普适方式计算:(1)先用下列公式式计算传动比大小从首轮到未轮所有从动轮齿数的乘积i1k=n1/nk=从首轮到未轮所有主动轮齿数的乘积(2)再用箭矢标注法确定各轮转向。讨论:(1)按齿轮传动顺序,依次标注表示齿轮转向的箭矢。(2)逢圆柱齿轮传动,内啮合时,主、从齿轮箭矢同向;外啮合时,主、从齿轮箭矢反向。(3)逢锥齿轮传动,主、从齿轮箭矢正交相对或相离,视结构布置情况而定。(4)逢蜗杆传动,需先判定主动蜗杆转向力方向,再确定从动蜗轮的转向。例9-1图示提升装置,已知z1=20,z2=50,z2′=16,z3=30,z3′=1,z4=40,z4′=18,z5=52,试计算传动比i15,并指出当提升重物时的手柄转向手柄解本轮系为含有锥齿轮、蜗杆传动的复杂轮系,应用普适方式计算1.计算传动比i15的大小z2×z3×z4×z5i15=n1/n5=z1×z2′×z3′×z4′50×30×40×52==541.6720×16×1×182.用箭矢标定转向:如图所示第三节行星轮系传动比的计算一、行星轮系的转化轮系行星轮系(动轴)转化轮系(定轴)对行星架H附以-nH的速度行星轮系(动轴)转化轮系(定轴)行星轮系的转化轮系示意动画转化前、后转化轮系中各构件的转速构件原轮系中的转速转化轮系中的转速1n1nH1=n1-nH2n2nH2=n2-nH3n3nH3=n3-nHHnHnHH=nH-nH=0二、单级行星轮系传动比的计算对图示结构的行星轮系,由于转化轮系中nHH=0,故可视为定轴轮系,从而借用定轮轮系传动比的计算公式有:推广到一般情况设nG和nK为行星轮系中任意两个齿轮G和K的转速乘积之间所有主动轮齿数的和齿轮乘积之间所有从动轮齿数的和齿轮KGKGnnnnnnimHKHGHKHGHGK)1(讨论:1.nG、nK、nH必须是轴线之间互相平行或重合的相应齿轮的转速(图示);2.将nG、nK、nH的已知值代入公式时必须带正号或负号;3.iHGK≠iGK。4.对于单级简单行星轮系,由于有一个太阳轮固定,其速度为0,因此已知一个构件的转速,可方便求得另一构件的转速HHHHHHHinniinnni131111131,10即例9-2一差动轮系如图a所示。已知各轮齿数为:z1=18,z2=24,z3=72;轮1和轮3的转速为:n1=100r/min,n3=400r/min,转向如图示。试求nH和i1H解由转化轮系传动比计算公式得1131133)1(zznnnniHHH由题意可知,轮1、轮3转向相反,将n1、n3及各轮齿数代入上式,得31min/3004187240010011HHHHHnnirnnn由此求得解之得i1H符号为负,表示行星架的转向与齿轮1的相反,与齿轮3的相同。例9-3图b为简单行星轮系。已知各轮齿数为:z1=100,z2=99,z2′=100;z3=101。试求iH1。解由转化轮系传动比计算公式10010010199)1(02122131133zzzznnnnnnniHHHHH即-i1H+1=9999/10000得iH1=1/10000iH1的符号为正,行星架与齿轮1转向相同。例9-4图示锥齿轮系中,已知齿数z1=35,z3=70,两太阳轮同向回转,转速n1=110r/min,n3=200r/min。试求转臂的转速nH解由公式题意轮1与轮3同向回转,符号相同,代入公式有解之可得nH=170r/min计算所得nH为正,故nH与n1转向相同133113zznnnniHHH23570200110HHnn三、多级行星轮系传动比的计算解题要点:①首先找出行星轮(几何轴线运动的齿轮)。②找出支承行星轮运动的构件,即行星架H。③找出与此行星轮啮合的太阳轮。④由上述行星轮、行星架、太阳轮和机架构成了一个单级行星轮系。⑤按上述办法,依次确定其它的简单行星轮系。⑥找出两个简单行星轮系运动的联系构件,代入已知求出未知。例9-5某直升飞机主减速器的行星轮系如图所示,发动机直接带动太阳轮1。已知各轮齿数为:z1=z5=39,z2=27,z3=93,z3′=81,z4=21两太阳轮同向回转,转速n1=110r/min,n3=200r/min。试求转臂的转速nH解图示为多级行星轮系。可划分为:1-2-3-H1与5-4-3′-H2两个单级行星轮系串联而成,关键联系构件是固定联接的行星架H1(齿轮5),因此有在轮系1-2-3-H1中i1H1=所以iⅠⅢ=i1H2=iⅠⅢ=i1H2=i1H1i5H239132399311113131zziH在轮系5-4-3′-H2中i5H2=39120398111153352zziH41.103912039132正号表明轴Ⅰ与轴Ⅲ转向相同第四节混合轮系传动比的计算解题要点:①区分哪些齿轮构成定轴轮系;②区分哪些齿轮构成单级行星轮系;③分别列出其传动比计算式;④代入已知求出未知例9-6图示轮系中,已知各轮齿数为:z1=20,z2=40,z3=81,z4=45,z4′=44,z5=80。试求传动比i15。解该轮系为混合轮系,可划分为定轴轮系1-2;单级行星轮系3-44′-5-H,两轮系串联,n3=0,联接构件齿轮2(H)定轴轮系部分:i12=n1/n2=-z2/z1=-40/20=-2行星轮系部分:453403553)1(zzzznnnniHHH因n3=0,得1001458081441114534535zzzziiHH则100155HHii又因n2=nH(同轴),则i15=i12iH5=-2×100=-200式中负号表示轮系中轮1与轮5的转向相反(如图示箭头方向所示)例9-7图示电动卷扬机传动简图中,已知各轮齿数为:z1=24,z2=48,z′2=30,z3=90,z′3=20,z4=40,z5=100。试求传动比i1H。若电动机转速n1=1450r/min,其卷筒转速nH为多少?解图示所示轮系中的双联齿轮2-2′相啮合的齿轮1、3为太阳轮,组成差动轮系。其余齿轮3′、4、5构成定轴轮系。关联构件为差动轮系的行星架H(定轴轮系中的z5)对轮1-22′-3组成的差动轮系有630249048)1(213213135zzzznnnniHHH对于3′-4-5所组成的定轴轮系有5110020)1(5313535zznni因为n5=nH,n3′=n3,故(b)式可为nH/n3=-1/5,即n3=-5nH,将其代入(a)式,则有(a)(b)651HHHnnnn解上式得iH=37当n1=1450r/min,可解得nH=1450/37=39.19r/min符号为正表示卷筒转向与电动机带动的齿轮1转达向相同。第五节轮系的功用轮系广泛用用于各种机械设备中,其功用如下:(1)传递相距较远的两轴间的运动与动力,如右图(2)获得大传动比。例9-3中,当z1=100,z2=99,z2′=100;z3=101时i1H=10000(3)可实现传动的变速与变向轮系的功用(一)轮系的功用(二)(3)可实现传动的变速与变向轮系的功用(4)用于运动的合成与分解汽车后桥差速器锥齿轮差速器中,齿轮2(2′)为行星轮,与太阳轮1、3啮合,有133113zznnnniHHH2nH=n1+n3合成分解运动分解举例,汽车后桥差速器直行:n1=n3=n4左拐:汽车绕速度瞬心C转动LrLrLrLrssnn)()(3131因为n4=nH求得54535451nzzrLrnnzzrLrn轮系的功用(三)(4)用于运动的合成与分解船用航向指示器传动简图太阳轮1的传动太阳轮3的传动当船舶直线行驶时,两发动机转速相同,航向指示针不变。当船舶航向需改变时,变化两发动机的转速,转速差越大,指针M偏转越大,航向转角越大第六节K-H-V型行星轮系简介渐开线少齿差行星减速器传动简图a)减速器传动b)W机构(等角速输出机构)一、渐开线少齿差行星传动由内齿轮1、行星轮2、行星架H、等角速输出机构W与输出轴组成,一般H为输入轴,输出轴V的转速为行星轮2的绝对转速。太阳轮和行星轮的齿数相差很少。故称少齿差行星传动。211221zznnnniHHH2120zznnnHH即有2212122121zzzzzzzziH所以故212221zzziiiHHHVz1-z2=1时称一齿差,传动比最大iHV=-z2孔销式等角速机构(等角速输出机构W)二、摆线少齿差传动(摆线针轮行星传动)摆线少齿差传动示意图由摆线少齿差齿轮副(摆线齿轮、针轮)、行星架及输出机构组成。工作原理与渐开线少齿差齿轮传动基本相同,仅齿廓内线不同。传动中太阳轮与行星轮齿数差为12212zzzznniVHHV式中,z1为针轮的针齿数;z2为摆线轮的齿数。优点:传动比大(单级9~17,双级121~7569)传动效率高(一般0.9~0.94)承载能力大(同时啮合齿数多),传动平稳没有齿顶相碰齿廓重叠干涉,轮齿磨损小,使用寿命长缺点:加工工艺复杂,制造精度高,要用专用刀具与专用机床。三、谐波齿轮传动谐波齿轮传动组成:谐波发生器(简称波发生器)——由凸轮(通常为椭圆形)及薄壁轴承组成,随着凸轮转动,薄壁轴承的外环作椭圆形变形运动(弹性范围内)。刚轮——是刚性的内齿轮。柔轮——是薄壳形元件,具有弹性的外齿轮。这种传动是借助波发生器迫使相当于行星轮的柔轮产生弹性变形,来实现与钢轮的啮合。是K-H-V机构的变态形式。机器人的肢体设计广泛应用谐波齿轮传动。如图机械人的腿部12个驱动部位采用谐波传动。谐波齿轮传动可分为双波、三波传动
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![关于规范拆危拆旧和墙体白化工作的意见[界政58号][1]](/doc-260715.png)

 mamat1
mamat1
本文标题:第九章轮系.
链接地址:https://www.777doc.com/doc-2124341 .html