您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 用于混合动力汽车上的四象限传感器的磁耦合分析
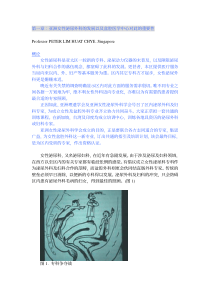
用于混合动力汽车上的四象限传感器的磁耦合分析摘要:在混合动力电动汽车的概念里,四象限传感器是两个同步永磁铁的结构的整合,它包括三个部分:定子、外转子和内转子。外转子是双径向磁通电机的普通的一部分,两个机械的磁路是耦合的。在机器设计期间,当考虑到磁耦合时,一个新的方法是解决永磁铁的操作点,让60KW的四象限传感器被设计出来。我们用分析法和有限元法来讨论磁通分布和电磁转矩磁耦合的影响,结果是耦合是容易被执行的。我们也讨论外转子的两个永磁体的磁化方向的选择,实事证明,磁化方向一致是较好的。关键词:四象限传感器,机械设计,磁耦合,磁化方向,永磁同步电机一、介绍四象限传感器的结构如[1]-[6]所示。四象限传感器系统的主要目的是允许内燃机在发动条件下有最适宜的效果,并且减少燃料消耗和排放。四象限传感器是系统的主要部分,嵌在内燃机和末端传动齿轮之间,包含三部分:三相绕组的定子、两种永磁铁在它外部和内部的外转子、三相绕组的内转子,如图1所示。定子和外转子作为一体,称为定子电机(SM),外转子和内转子作为一体称为双转子机(DRM)。外转子是定子电机和双转子机的结构和磁性的公共部分,因此,定子电机和双转子机的磁场在外转子里是耦合的,这一点应该被包括在机器设计与性能分析中。图1双径向磁通四象限传感器的截面图二、磁场分析和机械设计的方法在外转子部分,内部和外部的永磁体的磁化方向可能是一致的或反向的。如果是一致的,则主要的磁通在定子机磁路。双转子机磁电路和外部转子可以通过式(1)-(5)得出,基于图2(a)简单的空载等磁电路,空载条件下,定子和内转子电枢磁动力sF,0irF12111oiioroomimiooromoimiRRRRFFRRRRRRR12111oorioiomimiooromoimiRRRRFFRRRRRRR11211()()1oiorioororomimiooromoimiRRRRRRFFRRRRRRR1omoosorogomoRRRRRRRR1imiiirorigimiRRRRRRRR其中:o,i是定子机和双转子机磁路的主磁通or是外转子的磁通omF,imF是内外永磁体各自产生的磁动势omR,imR是内外永磁体的等效电阻oR,iR是内外永磁体的漏磁阻ogR,igR代表内部和外部气隙磁通的磁阻sR,irR,orR是定子、内转子、外转子的中心磁阻,考虑到磁饱和的影响,中心磁阻被看作非线性的。当磁化方向相反时,(1)和(2)中的正号会变成负号,并且在SM和DRM磁路中的主磁通要小于磁化方向一致时。此外,(3)式中的负号变成了正号,在外转子中的磁通在很大程度上增加。如果外转子的尺寸不是所需尺寸,这将导致外转子更深程度的饱和,并进一步降低在SM和DRM磁路的主磁通。因此,磁化方向一致是获得一个微弱的外转子回馈更好的选择。一个磁化方向一致的60千瓦的径向磁通4象限传感器原形被磁路分析方法所设计。当计算永磁工作点时,SM和DRM的参数需要如图(1)和(2)表示出来。所以,这两个机器被同步设计,(1)和(2)相结合来解决永磁工作点,其中考虑了SM和DRM之间的磁耦合。只有当外部永磁体产生的MMF被考虑,即Fim=0时,在SM和DRM磁路中的主磁通比率才可以通过(1)式比上(2)式获得,如式(6)所示1//oiiorRRRi1含气隙漏磁阻,是高渗透材料中的低芯磁阻远远大于低铁芯磁阻的,即在SM磁路的主磁通主要是由外部永磁体产生。相似性分析可以得出结论,在DRM磁路的磁通主要由内部永磁体产生。所以,我们可以看到,SM和DRM之间的磁耦合低。三、电磁转矩分析电磁转矩方程可以作为d轴和q轴的磁通和电流的功能表示,d轴和q轴磁通可以基于简化的d轴和q轴等效磁路图解决,如图2所示。在图2中,字母d和q分别是d轴和q轴末端的下标参数。o,i是内外永磁体的漏磁通,其意义和其他参数在(1)-(3)里的相同。电磁转矩最后的表达式如式(7)所示1222=2emSMswlsodsqoqsdsqoidiordswlsomimoldildordomoimisqildsdordirdoldildordsdilqorqsqorqirqolqilqorqolqilqmpTNkIIIRRRRmpNkFFRRRRRRRIRFRFRRRIRRFRFRRRRR其中emSMT是定子机的电磁转矩,m是相数,p是磁极对数,sN是数定子线圈匝数,wlsK是定子绕组的基本因素,sdI、sqI是定子d轴和q轴的电枢电流。oldR、ildR、olqR、ilqR用下面的式子表示:omooldsdordogdomoRRRRRRRRimiildirdordigdimiRRRRRRRRolqsqogqRRRilqirqigqRRR为了便于分析,引入投稿率的概念来评价两个永磁铁层的效果,以及定子和内转子电枢电流。外部永久磁铁的投稿约等于内部/ildordRR,d轴和q轴定子的电枢电流的贡献率内转子的/ildordRR和/ilqorqRR。ildR和ilqR包含气隙磁阻和漏磁阻,比ordR和orqR核心的磁阻更大,外部永磁体和定子电枢电流的贡献远高于内部永磁铁和内转子电枢电流。通过类似的分析,可以得出结论,DRM的电磁转矩是由内部的永久磁铁与内转子电枢电流。此外,这表明这种解耦应该很容易实现。四、磁耦合有限元分析法磁化方向选择与磁耦合二维有限元法的进一步研究。磁场和电磁转矩的调查分别通过Ansoft软件实现二维静态和瞬态求解器提供。A、永磁体磁化方向分析外部的和内部的永久磁铁同向的和反向的磁化方向分别采用有限元模型以及相应的外部和内部的气隙磁通密度如图3所示。从图3中,可以看出,当外部和内部永久磁铁的磁化方向相反,外部和内部的空气隙磁通密度小得多。图3外部和内永久磁铁的磁化方向一致和相反时的空气间隙磁通密度结果表明,与磁化方向一致相比,上述定性分析的结论相同,为了获得一个薄的外转子,并获得更好的性能,磁化方向应是一致的。B、磁耦合对机器性能的影响对磁场和电磁转矩的磁耦合效应分别进行了比较空气隙磁通密度和电磁转矩三种不同的磁动势源条件:只在永久磁铁提供MMF;与外部的和内部的永磁体提供MMF一起。计算的基本组成的炉内气隙磁通密度和线性增加MMF源提供的气隙磁通密度外部或内部磁铁显示在表中,计算的SM和DRM电磁转矩平均值和线性增加的电磁转矩MMF源仅由外部或内部磁铁提供,在表2中显示。磁通密度和转矩的比率不同的MMF来源也计算分析,如图所示在表一和表二中:从表一和表二,我们可以看到,在永久磁铁有贡献的外空气间隙磁通密度和电磁转矩;外部永磁体的内气隙磁通密度和DRM电磁转矩的贡献。这表明,耦合之间的和DRM存在的磁场和电磁转矩,但2.94%和4.07%的比率和磁通密度3.75%和5.75%比的电磁转矩证明磁耦合低。此外,差异外部和内部的永久磁铁一起工作,并在外部和内部永久磁铁的线性增加单独的磁通密度小电磁转矩。因此,可以得出结论,SM和DRM的解耦可以容易执行五、总结(1)外转子和内转子上的永久磁铁的磁化方向应该是一致的。(2)设计的60千瓦的四象限传感器和永磁体工作点被包含在考虑到磁耦合的接合等式的方法。(3)SM和DRM之间的磁耦合很低和解耦容易执行,取决于该SM和DRM独立控制的可以方便的实现和控制策略可以进一步调查。参考文献:[1]T.Bäckström,“Integratedenergytransducerdriveforhybridelectricvehicles,”Ph.D.dissertation,RoyalInst.Technol.,Stockholm.Sweden,Jun.2000.[2]S.ErikssonandC.Sadarangani,“Afour-quadrantHEVdrivesystem,”inProc.IEEE56thVehicularTechnologyConf.,Sep.2002,vol.3,pp.1510–1514.[3]E.NordlundandC.Sadarangani,“Thefour-quadrantenergytransducer,”inProc.37thIndustrialApplicationSocietyMeetingIAS,Pittsburgh,PA,Oct.2002.[4]E.Nordlund,“Thefour-quadranttransducersystemforhybridelectricvehicles,”Ph.D.dissertation,RoyalInst.Technol.,Stockholm,Sweden,May2005.[5]E.NordlundandS.Eriksson,“Testandverificationofafour-quadranttransducerforHEVapplications,”inProc.IEEEConf.VehiclePowerandPropulsion,Sep.2005,pp.37–41.[6]P.Zheng,R.Liu,andP.Thelin,“Researchontheparametersandperformancesofa4QTprototypemachineusedforHEV,”IEEETrans.Magn.,vol.43,no.1,pp.443–446,Jan.2007.[7]T.ZhengandD.Ye,“TheMethodtocalculatethetorqueofthepermanent-magnetsynchronousmotor,”Inf.Elect.Syst.,no.1,pp.6–10,1996.[8]K.LiandJ.Zhang,“Thefluxmethodtocalculatethetorqueofthepermanent-magnetsynchronousmotor,”Micro.Electro.Mach.,vol.33,no.3,pp.14–15,2000
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 sylcyzt
sylcyzt
本文标题:用于混合动力汽车上的四象限传感器的磁耦合分析
链接地址:https://www.777doc.com/doc-2202682 .html