您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 基于LIN总线的汽车车身系统的设计
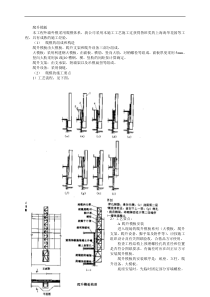
基于LIN总线的汽车车身系统的设计*袁文燕迟瑞娟胡桂兰(中国农业大学工学院,北京100083)摘要LIN(LocalInterconnectNetwork)协议是面向车辆低端分布式应用的一类串行通信协议。LIN设计目标作为CAN(ControllerAreaNetwork)的下层网络,同CAN相结合可构成车辆应用中的分层网络结构。本文对LIN总线进行了介绍,设计了LIN总线网络拓扑结构图,并对LIN节点的软硬件(主要是硬件)进行了设计调试,最后连接车身电器试验台进行了测试。关键词车身网络;LIN总线;车身控制中图分类号:TP339文献标识码:ADesignoftheautomotivebodynetworkbasedonLINbusYuanWenyanChiRuijuanHuGuilan(CollegeofEngineering,ChinaAgriculturalUniversity,Beijing100083,China)AbstractTheLIN(LocalInterconnectNetwork)Protocolisakindofserialcommunicationprotocol,whichisusedfordistributedelectronicsysteminvehicles.LINaimstobealowerprotocolofCAN(ControllerAreaNetwork)andtogetherwithCAN,theycanbeusedtoconstitutehierarchicalnetworkinthevehiclebodyapplication.TheLINbusisdescribedandtheLINbustopologydiagramisdesigned.Boththesoftwareandhardware(mainlyhardware)aredesignedanddebugged.Atlast,thebodytest-bedisusedtotestthehardwareandsoftware.Keywordsvehiclebodynetwork;LINbus;bodycontrol引言随着汽车电子技术的发展及对汽车性能要求的不断提高,汽车上的电子装置越来越多,在这种状况下,粗大的线束与汽车中有限的可用空间之间的矛盾越来越尖锐,而且也成为汽车轻量化和进一步电子化的最大障碍。计算机网络化的发展为解决此问题提供了可能。通过网络将汽车上各种电子装置与设备连接起来,实现相互之间的信息共享,既减少了线束,又可更好地控制和协调汽车的各个系统,使汽车性能达到最佳,同时提高驾驶和乘坐的舒适性和安全性。目前,全世界有40多种车辆网络标准:控制器局域网CAN(ControllerAreaNetwork)、局部互联网LIN(LocalInterconnectNetwork)、高速容错网络协议FlexRay、用于汽车多媒体和导航的媒体定向系统传输MOST(MediaOrientedSystemTransport),以及与计算机网络兼容的蓝牙、无线局域网等无线网络技术。[1]现在,在车身控制领域,LIN以其成本低等特性获得了极大的应用。LIN的目标是为现有汽车网络(例如CAN总线)提供辅助,LIN总线与CAN总线一起构成目前汽车界最广泛采用的总线形式,使用LIN总线可大大节省成本。1.LIN总线介绍1998年,汽车制造商奥迪公司、宝马公司、戴姆勒克莱斯勒公司、沃尔沃汽车公司、大众汽车公司、通信领域的专业厂商火山通信技术公司以及半导体生产商摩托罗拉公司,共同创建了LIN(LocalInterconnectNetwork)协会。其目的是为汽车网络系统提供一个开放基金项目:国家“863”课题(2003AA501995-4)作者简介:袁文燕,硕士研究生;迟瑞娟,副教授,研究生导师,主要从事汽车电子学研究。的A级(数据传输速率通常小于10kb/s的低速车身网络)串行总线通信标准,允许在此基础上开发汽车低端网络系统,并且不需要使用者支付使用费用或版税。LIN的提出主要面向对性能、带宽及复杂性要求不高的低速网络。[2]它采取了基于ISO9141NRZ的传输模式。它是单线单主多从的协议,采用车用的12V电池供电,数据传送由主节点控制。它与CAN相比的优势在于:LIN的生产及器件成本比CAN低,传输线为单线,取消了CAN所需的5V电压调节器;它采用的是UART/SCI接口硬件,和大多数微控制器一样,而CAN的接口是非标的;它采用的自同步方式避免了给从节点外加晶振。LIN所需的所有接口硬件包括电线、连接件以及器件约需一美元,而CAN的接口约需二美元。LIN以其性价比高灵活性好以及多方强大技术支撑的特点在低速网络中有望成为主流标准,并可通过网关作为CAN的子网接入多元系统中,使得系统更具可控性。LIN的物理层为单线,每节点为带上拉电阻线与总线。LIN的节点数并未由标识符的数目限定,而是受物理层的特性所限。一般LIN的推荐节点为不超过16个,否则网络阻抗将下降,抗干扰能力也将下降。每增加一个节点将使网络阻抗下降将近3%;网络最长线路应不超过40m;主节点终端阻抗为1kΩ,从节点终端电阻为30kΩ。在LIN报文传输方面,主要有以下特点:报文传输是由报文帧的格式形成和控制的,报文帧由主机任务向从机任务传送同步和标识符信息,并将一个从机任务的信息传送到所有的其它从机任务。主机任务位于主机节点内部,负责报文的进度表,发送报文头。从机任务位于所有的(即主机或从机)节点间,其中一个(主机节点或从机节点)发送报文的响应。一个报文帧由一个主机节点发送的报文头和一个主机或从机节点发送的响应组成。报文帧的报文头包括一个同步间隔场、一个同步场和一个标识符场。报文帧的响应则由3个到9个字节场组成:2、4或8字节数据场和1个校验和场。2.总线拓扑设计LIN设计的目标是作为CAN的下层网络,此次设计的车身网络,是将LIN作为CAN系统的下层网络,这里设计了两种总线拓扑结构,第一方案如图1所示。在该方案中,节点主要是按照LIN总线按物理位置设置节点,即物理位置相近的电器元件连接到一个节点控制单元,各元件的信号通过控制单元与LIN总线进行通讯。这种方案成本极低,但是在这种方案中,由于每个从节点上需要实现很多功能,会导致主节点负荷较大,并且节点数过多会导致网络阻抗降低,影响通讯的准确性,所以一般来说我们采用第二种方案。[3][4]第二种方案如图2所示,该方案在设计时兼顾了电器设备的功能和位置,主节点包括车灯节点,座椅节点,车门节点,仪表节点和空调节点。仪表节点主要是接收各节点发送的状态及诊断信号,并在显示在仪表板上。其他节点的主节点均为控制节点,接收控制信号,从节点为执行节点,执行从主节点发来的任务,并把主节点需要的信息反馈给主节点。上层网络CAN总线上有5个节点,每一个CAN节点又是下层LIN网络上的主节点。汽车前部(主节点)仪表板附近手套箱附近副驾驶车门驾驶员车门汽车后部右后车门左后车门电动座椅图1CAN-LIN总线拓扑结构(1)Fig.1CAN-LINbustopology(1)LIN3.节点硬件设计车灯部分是其中较为复杂的部分,下面就以车灯节点为例进行车身系统的软硬件设计。车灯部分的LIN子网络由一个主节点和五个从节点构成(如图2)。3.1硬件设计车灯主节点可以划分成以下几个模块:电源管理模块、LIN通讯模块、CAN通讯模块、输入及控制模块。电源管理模块,主要的功能是把蓄电池的电压转换成稳定的+12V,并用两个7805芯片把+12V的电源转化成VCC和+5V,以供给其它元件使用,同时分别连接到信号地和电源地,以增强抗干扰能力,如图3。LIN通讯模块执行和从节点的信息交换任务,硬件上采用的是MC33399LIN收发器,其中RX和TX引脚分别和主控制器的串口连接,在主节点中需要在LIN引脚上加一个阻值为1K的上拉电阻如图4所示。CAN通讯模块图3电源管理模块图4LIN通讯模块Fig.3BatterymanagementmoduleFig.4LINcommunicationmodule采用SJA1000CAN控制器和82C250CAN收发器,并用两个光耦6N137进行光电隔离。[5][6]输入及控制模块是主节点的核心模块,接收控制信号,即灯的开关信号,这里用的微控制器是AT89S52,开关管理芯片为MC33287,该芯片具有很强的控制功能,并且自带诊断功能,可以很好的管理输入信号,输入信号有左转、右转、雾灯、示廓灯、远光和近光,其中刹车灯和倒车灯的信号来自于上层的CAN网络,不是由这个节点直接控制的。车灯从节点(以左前灯节点为例)可以划分成以下几个模块:电源管理模块、LIN通讯座椅节点驾驶员车灯节点左前灯右后灯雨刷器左后灯右前灯车门节点左前门右后门左后门右前门副驾驶仪表节点空调节点图2CAN-LIN总线拓扑结构(2)Fig.2CAN-LINbustopology(2)LINLINLINLINCANCAN模块、输出控制模块。电源管理模块和LIN通讯模块都是和主节点类似的,但是从节点LIN通讯模块的MC33399芯片的LIN引脚不用接上拉电阻。[7]输出控制模块的微控制器采用AT89S51。由于功率芯片控制稳定,在车灯的驱动上,均采用功率芯片进行驱动。具体的芯片应用如下:远光灯(65W)用BTS6144,近光灯(55W)用BTS6144,转向灯(27W)和雾灯(27W)用BTS5234L。3.2软件设计软件方面最重要的就是主节点和从节点的软件设计。在单片机和LIN驱动程序初始化后,通过主节点电路板上的开关,调节LIN是否被允许工作。如果工作,主函数会将帧头发送到从节点。如果从节点有反应,反馈回来的数据会读取,同时检查该节点是否为新节点。如果是,则显示新节点。[8]对于从节点,在配置完寄存器后,进行初始化,初始化完成后进入主程序循环,如果LIN总线5S没有活动,则进入睡眠状态,如果有,则查看开关的状态如果有,则查看开关类型判断是进入节点的配置模式,还是进入正常模式。4.结论系统设计的最后,对软硬件进行了调试,并在自搭建的车身电器实验台上实现了车身网络的通讯与控制。主要进行的调试工作可以分为:LIN主从节点之间的通讯调试,以及连接试验台后进行的调试。LIN节点之间的调试:选取车灯主节点及左前灯节点,将程序导入单片机,通电,调节主节点上的控制开关,能实现对示廓灯、远、近光,转向灯以及雾灯的控制。试验台调试:将各个节点的电路板连接到电器试验台上,通电,调节各开关,可实现各种控制功能。本文设计了LIN总线的两种拓扑结构,并设计了LIN节点的硬件和软件,并连接至自行搭建的实验台进行了实物试验,实现了低成本的汽车车身电器控制,采用LIN总线等是目前汽车车身控制的方向。参考文献[1]张平.中国电子产业初探.中国科学院计算技术研究所信息技术快报.2004,(10)[2]LINConsortium.LINSpecificationPackageRevision2.0.2003[3]JohnVDeNuto.StephenEwbank.FrancisKleja,etal.LINBusanditsPotentialuseinDistributedMultiplexApplications.SAETechnicalPaperSeries,2001-01-0072[4]Motorola.LocalInterconnectNetwork(LIN)Demonstration.2000[5]朱飞,李光辉,陈志英.基于CAN总线的分布式控制网络智能节点的设计.微计算机信息,2003(1)[6]饶运涛.邹继军.郑勇芸.现场总线CAN原理与应用技术.北京:北京航空航天大学出版社,2003.42~43[7]Motorola.MC33399LINInterface.ProductProposalRev4.0,2001[8]易生海.康晓敦.FreescaleLIN总线应用开发平台.汽车电子,2004,(5)
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 百变舞者
百变舞者
本文标题:基于LIN总线的汽车车身系统的设计
链接地址:https://www.777doc.com/doc-2570637 .html